Файл: Литература 25 Краткая история развития эргономики 27.doc
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 12.12.2023
Просмотров: 1002
Скачиваний: 1
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
СОДЕРЖАНИЕ
Эргономика и ее место в системе наук
Краткая история развития эргономики
Принципы эргономического анализа трудовой деятельности
5. Эргономические основы проектирования техники
Эргономические основы организации рабочего места
Оптимизация средств и систем отображения информации
Оптимизация рабочих движений и органов управления
Учет факторов среды при оптимизации системы «человек—машина»
Шариковый регулятор представляет собой устройство, которое может поворачиваться в любом направлении для перемещения на экране эхо-сигнала. Работа с шариковым регулятором производится значительно медленнее, чем со световым пером и ручкой управления, но результаты точнее.
§11. Сигнализаторы звуковые (неречевых сообщений)
Сигнализатор — это индикатор, предназначенный для предъявления человеку сведений в случаях, когда требуется специальное привлечение его внимания. К звуковым сигнализаторам неречевых сообщений относятся источники звука, используемые на рабочем месте для подачи аварийных, предупреждающих и уведомляющих сигналов (например, сообщение одномерное; сообщение короткое; сообщение требует немедленных действий; место приема информации слишком освещено или затемнено; повышенные ускорения; зрительный анализатор оператора занят и др.).
Основные технические характеристики используемых звуковых сигналов неречевых сообщений указаны в табл. 12.
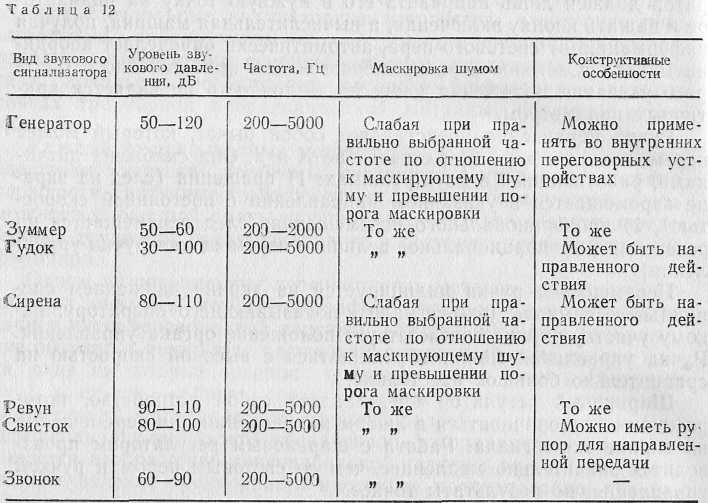
Звуковые сигнализаторы неречевых сообщений должны:
-
обеспечивать привлечение внимания работающего оператора путем неожиданной подачи сигнала, изменением уровня звукового давления, модуляции по частоте и уровню звукового давления, увеличением длительности звучания, частоты следования; -
сообщать оператору об отказе или изменениях в системе «человек— машина»; -
не перегружать слуховой анализатор работающего оператора; -
не отвлекать внимание других операторов; -
не мешать речевой связи; -
не утомлять работающего оператора, не оглушать его при увеличении уровня звукового давления сигнала и не пугать при неожиданном появлении, что может привести к нарушению деятельности оператора.
В звуковых сигнализаторах при наличии ручного отключения должен быть обеспечен автоматический возврат схемы в исходное положение для получения очередного управляющего сигнала.
Частотная характеристика тональных сигналов должна быть в пределах полосы 200—5000 Гц. При наличии высокочастотного маскирующего шума допускается расширение предела до 10 000 Гц. При наличии в помещении постов управления акустических экранов частотная характеристика тональных сигналов рекомендуется в пределах полосы 200—1000 Гц. При изменениях частоты тона шаг изменения должен быть не менее 3% по отношению к исходной частоте.
Предупреждающие и аварийные сигналы должны быть прерывистыми. Несущая частота предупреждающих сигналов должна быть 200—600 Гц при длительности сигналов и интервалов между ними 1—3 с. Несущая частота аварийных сигналов должна быть 800—2000 Гц при длительности интервалов 0,2—0,8 с.
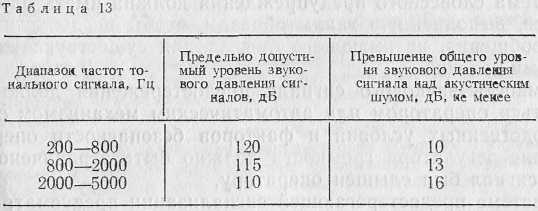
Уровень звукового давления сигналов у входа в наружный слуховой проход органов слуха человека на рабочем месте должен быть в пределах полезного динамического диапазона, т. е. от 30 до 100 дБ, При маскировке шумом предельно допустимые уровни звукового давления сигналов должны быть от 110 до 120 дБ (см. табл. 13). При изменениях уровня звукового давления шаг измерения должен быть не менее 3 дБ. Уровень звукового давления аварийных сигналов должен быть не выше 100 дБ. Уровень звукового давления предупреждающих сигналов должен быть не выше 80—90 дБ. Уровень звукового давления уведомляющих сигналов должен быть ниже не менее чем на 5% по отношению к уровню звукового давления аварийных сигналов.
Длительность отдельных сигналов и интервалов между ними должна быть не менее 0,2 с. При изменениях длительности звуковых посылок шаг измерения должен быть не менее 25% по отношению к исходной длительности. Длительность звучания интенсивных звуковых сигналов не должна превышать 10 с.
Модуляция сигналов должна производиться изменениями амплитуды и частоты. При амплитудном модулировании глубина модуляции должна быть не менее 12%. При частотном модулировании глубина модуляции должна быть не менее 3% по отношению к несущей частоте.
При маскировке шумом используют звуковые сигналы, частота которых возможно больше отличается от наиболее интенсивных частот шума. Необходимо обеспечивать превышение порога маскировки звуковых сигналов от 10 до 16 дБ (табл. 13).
При маскировке тональными сигналами используют звуковые сигналы, частота которых максимально отличается от частоты маскирующего тона.
§12. Словесные сигналы предостережения
Эти сигналы состоят из начального настораживающего сигнала (неречевого) для привлечения внимания и обозначения общей задачи, а также из краткого стандартизированного речевого сигнала (словесного сообщения), который идентифицирует конкретные условия и предлагает соответствующие действия.
Уровень словесных сигналов тревоги для критичных функций должен быть по крайней мере на 20 дБ выше уровня помех в месте расположения оператора, принимающего сигнал.
Голос, используемый для записи словесных сигналов предостережения, должен иметь хорошую дикцию и быть хорошо развитым. Словесный сигнал предостережения дается официальным, беспристрастным и спокойным голосом. Слова должны быть, во-первых, разборчивыми, во-вторых, соответствующими смыслу ситуации (условий), и, в-третьих, краткими.
Критичные сигналы предостережения следует повторять с паузой не менее 3 с между сообщениями до тех пор, пока положение не будет исправлено.
Система словесного предупреждения должна иметь блокировку режимов, выполненную таким образом, чтобы не допустить передачи сообщения, не имеющего смысла для существующих в данное время условий.
Громкость звукового сигнала предостережения должна регулироваться оператором или автоматическим механизмом с учетом производственных условий и факторов безопасности, операторов. Движение регулятора громкости должно быть ограничено, чтобы любой сигнал был слышен оператору.
В системе предостерегающей сигнализации предусматриваются средства для ручного установления и регулировки громкости. Длительность звуковых сигналов предостережения должна быть не менее 0,5 с и может продолжаться до соответствующей реакции (корректирующего действия) оператора или автомата. Завершение -корректирующего действия должно автоматически прекращать сигнал.
В аварийных ситуациях не следует использовать сигналы, которые остаются включенными или нарастают, если их отключение может мешать необходимым корректирующим действиям.
ЛИТЕРАТУРА
1. Аветисов Э. С, Розен блюм О. 3. Офтальмоэргономика (предмет, задачи и методы исследования).— В кн.: «Офтальмоэргономика» (сборник научных трудов). М., изд. Мин-ва здравоохранения РСФСР, 1976.
2. Венда В. Ф. Инженерная психология и синтез систем отображения инфор-
мации. М., «Машиностроение», 1975.
3. Галактионов А. И. Представление информации оператору. М., «Энергия»л 1969.
4. Д о б р о л ен ский О. П., Завалов Н. Д., По ном арен к о В. А., Ту в а ев В. А. Методы инженерно-психологических исследований в авиации. М., «Машиностроение», 1975.
5. Дракин В. И., Зинченко В. П. Послесловие к книге Пушкина В. Н. «Оперативное мышление в больших системах». М., «Энергия», 1965.
6. Згу р ский В. С, Лисицын В. Л. Элементы индикации. Справочник.М., «Энергия», 1974.
7. 3 и н ч е н к о В. П., Мунипов В. М., Смолян Г. Л. Эргономические основы организации труда. М., «Экономика», 1974.
8. Зинченко В. П., Панов Д. Ю. Игровые системы управления и информационные модели.— В кн.: Система «человек и автомат». М., «Наука», 1965.
9. 3 и н ч е н к о В. П„ П а н о в Д. Ю. Узловые проблемы инженерной психологии.— «Вопросы психологии», 1962, № 2.
10. Зинченко Т. П. Кодирование зрительной информации.— В кн.: Методо логия исследования по инженерной психологии и психологии труда, ч. 2. Л., Изд-во Лешшгр. ун-та, 1975.
11. Зинченко Т. П. Прием и переработка информации оператором.—В кн.: Эргономика. Принципы и рекомендации, вып. 3. М., изд. ВНИИТЭ, 1971.
12. И ль и н а Г. Н. Эргономические аспекты психофизиологии и психофизики зрения.— В кн.: Эргономика. Принципы и рекомендации, вып. 5. М., изд. ВНИИТЭ, 1974.
13. Инженерно-психологические требования к системам управления. Под ред. В; П. Зинченко. М., изд. ВНИИТЭ, 1967.
14. Катьи Г. П. Объемное и квазиобъемное представление информации. М., «Энергия», 1975.
15. Крылов А. А. Человек в автоматизированных системах управления. Л., Изд-во Ленингр. ун-та, 1972.
16. Ла ксен б ер г К. Техника систем индикации. Пер. с англ. М., «Мир», 1970.
17. Леонов В. А. Трехдверная индикация. Л., «Энергия», 1970.
18. Ли т в а к И. И., Л о м о в Б. Ф., Соловейчик И. Е. Основы построения аппаратуры отображения в автоматизированных системах. М., «Советское радио», 1975.
19. Ломов Б. Ф. Человек и техника. М., «Советское радио», 1966.
20. Николаев В. И. Информационная теория контроля и управления (в приложении к судовым энергетическим установкам). Л., «Судостроение», 1973.
21. Пул Г. Основные методы и системы индикации. Пер. с англ. Под ред. ; Ю. И. Валова. Л., «Энергия», 1969.
22. .Пушкин В. Н. Оперативное мышление в больших системах. М., «Энергия», 1965.
23. Чачко А. Г. Производство — язык — человек. Проблемы отображения информации. М., «Энергия», 1977.
8
Оптимизация рабочих движений и органов управления
§1. Оптимизация рабочих движений
При создании научных основ проектирования средств деятельности человека в системе «человек-машина» как в советской, так и в зарубежной эргономике и инженерной психологии основное внимание уделялось разработке требований к информационным моделям и средствам предъявления информации, и значительно меньшее — разработке требований к органам управления, которые представляют элементы рабочего места, предназначенные для передачи управляющих воздействий от человека к машине. Для комплексного решения проблемы одинаково важно проектирование на современном уровне как средств предъявления информации, так и органов управления с учетом эргономических требований.
Характер, последовательность, темп и ритм рабочих движений во многом задаются формой и конструкцией инструментов, органов управления, машин и другого оборудования, а также организацией рабочих мест. Поэтому при их конструировании и организации необходимо учитывать следующие правила экономии движений:
— при работе двумя руками движения их должны быть по возможности одновременными, симметричными и противоположными по направлению. Одновременность и симметричность движений обеспечивают равновесие всего корпуса, что облегчает выполнение работы;
— проектируемые движения должны быть простыми, плавными и закругленными. Для выполнения рабочей операции необходимо применять наименьшее количество движений;
— траектория рабочих движений не должна выходить за пределы рабочей зоны;
— движения должны отвечать анатомической структуре тела и осуществляться по возможности в зоне зрительного контроля. Каждое движение должно заканчиваться в положении, удобном для начала следующего движения, причем последующее и предыдущее движения должны быть плавно связаны между собой;
— движения должны быть не только простыми, но и ритмичными. Нельзя допускать слишком медленных или слишком быстрых ритмов. При этом следует иметь в виду, что «так называемые «неритмичные» движения — это не лишенные ритма движения, а движения либо с отклонениями от заданного ритма, либо нерациональные движения, что отражается на ритме» [4, с. 66];
— движения должны быть привычными для рабочего. При обучении новой операции или знакомстве с новым оборудованием следует учитывать особенности ранее сформированных у рабочего навыков;