ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 04.02.2024
Просмотров: 526
Скачиваний: 1
СОДЕРЖАНИЕ
1.Основное уравнение движения электропривода.
2.Основные понятия об устойчивости электропривода.
3.Определение времени пуска и торможения электропривода
6.Расчет нагрузочных диаграмм и тахограмм.
8.Расчет и выбор мощности двигателей при длительном режиме работы
10.Механические характеристики двигателей постоянного тока последовательного возбуждения.
11.Способы торможения двигателей постоянного тока последовательного возбуждения.
12.Способы регулирования скорости двигателей постоянного тока независимого возбуждения.
13.Способы регулирования скорости двигателей постоянного тока независимого возбуждения.
15.Расчет тормозных сопротивлений двигателя постоянного тока независимого возбуждения (RДТ, RП).
17.Расчет пусковых сопротивлений в приводах с двигателями постоянного тока независимого возбуждения.
19.Каскадные схемы включения АД. Регулирование скорости асинхронных двигателей в системе АВК.
20.Расчет ступени противовключения для асинхронного двигателя.
21.Торможение асинхронного двигателя противовключением.
22.Регулирование скорости асинхронных двигателей.
23.Расчет пусковых сопротивлений асинхронных двигателей.
26.Регулирование скорости путем шунтирования обмотки якоря.
27.Расчет и выбор основного электрооборудования вентильного электропривода.
28.Механические характеристики вентильного электропривода.
30.Выпрямительный и инверторный режим работы тиристорного электропривода постоянного тока.
31.Управление выпрямленным напряжением в системе ТП-Д.
32.Регулирование скорости двигателей в системе ТП-Д. Расчет механических характеристик.
33.Регулирование выпрямленного напряжения в системе ТП-Д.
34.Энергетические характеристики системы ТП-Д
36.Регулирование скорости в системе ТПЧ-АД
37.Регулирование скорости в системе ТПЧ-СД.
38.Переходные процессы при пуске двигателя
39.Механические характеристики синхронных двигателей. Пуск в ход и торможение синхронных двигателей.
40.Особенности пуска синхронных двигателей. Разновидности схем пуска синхронных двигателей.
Следовательно, уменьшение магнитного потока вызывает увеличение скорости
Жесткость механических характеристик снижается при ослаблении магнитного потока:
Следует иметь в виду, что при постоянном значении допустимого тока
Для специальных двигателей диапазон увеличения скорости может достигнуть
Расчет добавочных сопротивлений, включаемых в цепь возбуждения для получения необходимого ослабления поля двигателя, производится с использованием кривой намагничивания, указываемой в специальных справочниках.
Изменение напряжения питающей сети
Изменения напряжения
Скорость идеального холостого хода пропорциональна напряжению на зажимах двигателя:
Перепад скорости в этом случае находится
Жесткость механических характеристик постоянна:
Характеристика, соответствующая напряжению
33.Регулирование выпрямленного напряжения в системе ТП-Д.
Регулирование выпрямленного напряжения предполагает использование силового управляемого преобразователя, установленная мощность которого превышает мощность двигателя. При изменении напряжения пропорционально изменяется скорость холостого хода электропривода.
Выпрямленная ЭДС преобразователя является функцией угла регулирования
Механические характеристики системы ТП-Д при различных углах регулирования представлены на рисунке 1.
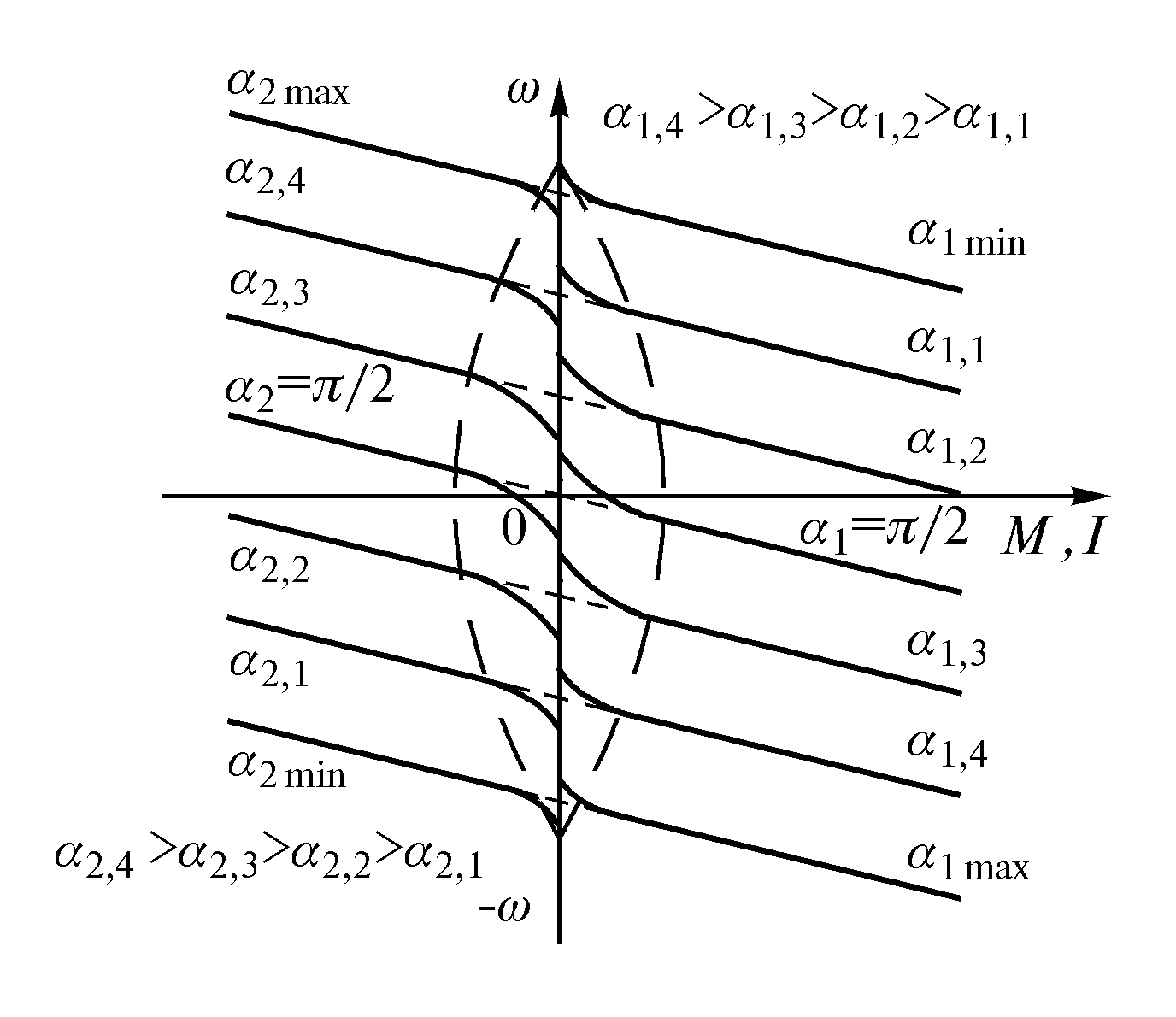
Рисунок 1 – Механические характеристики системы ТП-Д при различных углах регулирования
В дополнении можно сказать, что способ экономичен в эксплуатации, поскольку не требуется дополнительных резисторов рассеивающих энергию. Кроме того удается снизить потери энергии в переходных процессах.
34.Энергетические характеристики системы ТП-Д
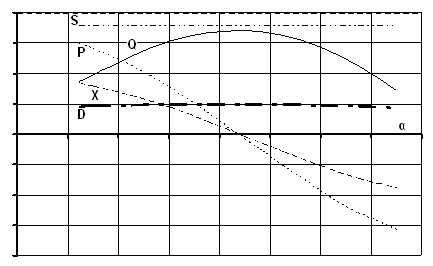
Энергетические характеристики тиристорных преобразователей оцениваются коэффициентом мощности χ и коэффициентом полезного действия η.
Коэффициент мощности χ в самом общем случае может быть определен по формуле
где:
Активная мощность, потребляемая из сети:
где
Коэффициент мощности без учета процесса коммутации определяется по формуле:
Для регулируемого мостового выпрямителя с учетом процесса коммутации (
где:
Активная и реактивная мощности по первой гармонике тока:
где:
Мощность искажения (дисторции):
35.Системы ТПЧ-АД
Силовая часть частотно-регулируемого электропривода переменного тока состоит из двух основных элементов: асинхронного двигателя и преобразователя частоты, включенного между двигателем и сетью. Преобразователь частоты не только обеспечивает эффективное регулирование частоты вращения двигателя изменением частоты напряжения на его входе, но и необходимые значения тока и напряжения.
Преобразователи частоты (ПЧ), применяемые в регулируемых электроприводах с асинхронными и синхронными двигателями делятся на три вида:
-
с промежуточным звеном постоянного тока (ПЧ, построенные на основе автономных инверторов АИ); -
с непосредственной связью. -
с промежуточным звеном переменного тока повышенной частоты.
В свою очередь, в зависимости от схемы ПЧ, в особенности от конструкции промежуточного звена постоянного тока, от режима работы источника питания инвертора и особенностей протекания в нем электромагнитных процессов различают следующие типы автономных инверторов:
-
автономные инверторы напряжения (АИН); -
автономные инверторы тока (АИТ).
В ПЧ с промежуточным звеном постоянного тока (см. рисунок 1а) производится двукратное преобразование напряжения (энергии) питающей сети. Сначала оно выпрямляется выпрямителем В, а затем с помощью автономного инвертора преобразуется в переменное напряжение или ток регулируемой частоты. Между выпрямителем и автономным инвертором обычно включается фильтр, сглаживающий пульсации либо выпрямленного напряжения, либо выпрямленного тока. Выходная частота ПЧ может регулироваться в широких пределах, как вверх, так и вниз от частоты питающей сети. Это свойство, а также простота схем и сравнительно небольшое число силовых элементов сделали подобные преобразователи основной структурой при построении широко регулируемых электроприводов переменного тока.
Рисунок 1 - Структурные схемы силовой части преобразователей частоты.
Основной недостаток таких преобразователей – двукратное преобразование энергии, что снижает их КПД и увеличивает массу и габариты.
Преобразователи частоты с непосредственной связью строятся на основе реверсивных управляемых выпрямителей (однофазных, многофазных, нулевых и мостовых). В этих ПЧ выпрямление переменного напряжения источника энергии и преобразование этого выпрямленного напряжения в переменное, регулируемой частоты, совмещено в одном устройстве. Это обуславливает однократное преобразование энергии, повышенный КПД, малые габариты и массу. Основные недостатки таких преобразователей: низкий коэффициент мощности, больший процент высших гармоник в выходном напряжении, сложность системы управления и ограниченность максимального значения выходной частоты.
В ПЧ с промежуточным звеном переменного тока (рисунок 1б) напряжение сети