ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 04.02.2024
Просмотров: 497
Скачиваний: 1
СОДЕРЖАНИЕ
1.Основное уравнение движения электропривода.
2.Основные понятия об устойчивости электропривода.
3.Определение времени пуска и торможения электропривода
6.Расчет нагрузочных диаграмм и тахограмм.
8.Расчет и выбор мощности двигателей при длительном режиме работы
10.Механические характеристики двигателей постоянного тока последовательного возбуждения.
11.Способы торможения двигателей постоянного тока последовательного возбуждения.
12.Способы регулирования скорости двигателей постоянного тока независимого возбуждения.
13.Способы регулирования скорости двигателей постоянного тока независимого возбуждения.
15.Расчет тормозных сопротивлений двигателя постоянного тока независимого возбуждения (RДТ, RП).
17.Расчет пусковых сопротивлений в приводах с двигателями постоянного тока независимого возбуждения.
19.Каскадные схемы включения АД. Регулирование скорости асинхронных двигателей в системе АВК.
20.Расчет ступени противовключения для асинхронного двигателя.
21.Торможение асинхронного двигателя противовключением.
22.Регулирование скорости асинхронных двигателей.
23.Расчет пусковых сопротивлений асинхронных двигателей.
26.Регулирование скорости путем шунтирования обмотки якоря.
27.Расчет и выбор основного электрооборудования вентильного электропривода.
28.Механические характеристики вентильного электропривода.
30.Выпрямительный и инверторный режим работы тиристорного электропривода постоянного тока.
31.Управление выпрямленным напряжением в системе ТП-Д.
32.Регулирование скорости двигателей в системе ТП-Д. Расчет механических характеристик.
33.Регулирование выпрямленного напряжения в системе ТП-Д.
34.Энергетические характеристики системы ТП-Д
36.Регулирование скорости в системе ТПЧ-АД
37.Регулирование скорости в системе ТПЧ-СД.
38.Переходные процессы при пуске двигателя
39.Механические характеристики синхронных двигателей. Пуск в ход и торможение синхронных двигателей.
40.Особенности пуска синхронных двигателей. Разновидности схем пуска синхронных двигателей.
Но в этом случае чтобы Iв осталось неизменным, необходимо Uв увеличить в
Уравнение (5) примет вид:
2) Форсировка отсечкой.
При данном способе форсируется подводимое напряжение к обмотке возбуждения в
Так как в этом случае установившееся значение тока превосходит допустимое в
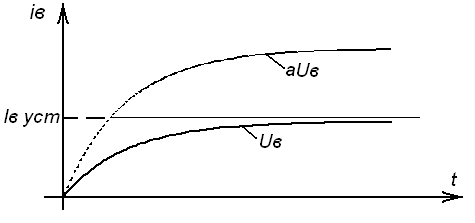
Рисунок 5
Время переходного процесса
График зависимости коэффициента форсировки от отношения времени переходного процесса к постоянной времени изображен на рисунке 6

Рисунок 6
Из этого графика следует что
2. Переходные процессы в двигатели постоянного тока независимого возбуждения.
Схема соединения двигателя изображена на рисунке 7.
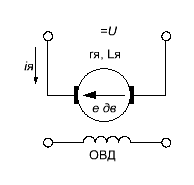
Рисунок 7
Подставляя (13), (10) и (12) в (9) получим:
или
Разделим обе части уравнения (15) на С:
Обозначим
Составляющую
где:
С учетом последнего выражения:
Уравнение (17) позволяет производить анализ поведения электродвигателя в переходных режимах.
В статическом (установившемся) режиме, при
– уравнение электромеханической характеристики, которая изображена на рисунке 8.
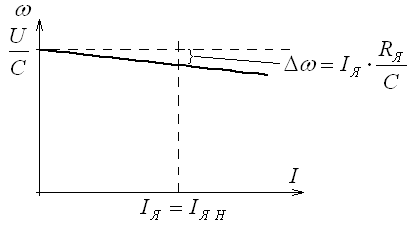
Рисунок 8
Переходные процессы будут вычисляться по выражению (рисунок 9):
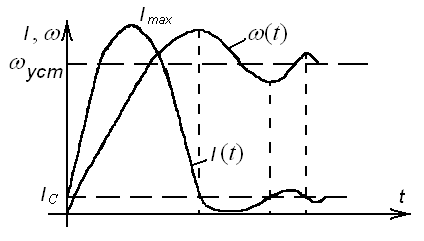
Рисунок 9
Здесь
Если считать что
Данные графики изображены на рисунке 10.

Рисунок 10
3. Переходные процессы в системе Г-Д.
Схема системы Г-Д изображена на рисунке 11.

Рисунок 11
Из (21)
Подставив (23) и (24) в (20) получим
или
При
Учитывая то что
; (29)
Подставляя (28) и (29) в (26) получим:
 (30)
(30)Его характеристическое уравнение:
В установившемся режиме:
или
где:
Механическая характеристика (32) изображена на рисунке 12
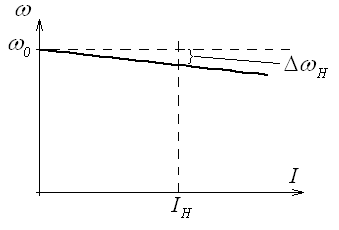
Рисунок 12
Полное решение уравнения (31) имеет вид:
39.Механические характеристики синхронных двигателей. Пуск в ход и торможение синхронных двигателей.
Синхронный двигатель при подключении его обмоток статора к источнику питания не развивает пускового момента, поскольку ротор из-за своей инерционности не может мгновенно достичь частоты вращения, равной частоте вращения магнитного поля статора, которая устанавливается почти одновременно с включением обмотки статора в сеть. Поэтому между полюсами возбужденного ротора и вращающегося поля статора не возникает устойчивой магнитной связи, создающей синхронный вращающий момент.
Для пуска синхронного двигателя необходимо предварительно привести ротор во вращение с частотой, близкой частоте вращения поля статора. В этих условиях поле статора настолько медленно перемещается относительно полюсов вращающегося ротора, что при подключении обмотки возбуждения к источнику питания между полюсами ротора и вращающегося поля статора устанавливается магнитная связь, обеспечивающая возникновение синхронного электромагнитного момента. Под действием этого момента ротор втягивается в синхронизм, т.е. начинает вращаться с синхронной частотой.
С
 уществует несколько способов пуска синхронного двигателя, но практическое применение получил асинхронный способ. Для его реализации в пазах полюсных наконечников ротора располагают стержни пусковой короткозамкнутой обмотки, выполненной аналогично обмотке короткозамкнутого ротора. Обычно стержни этой обмотки делают из латуни или меди и замыкают с двух сторон медными кольцами. Для пуска синхронного двигателя замыкают обмотку возбуждения ОВ на резистор r (рисунок), включают в трехфазную сеть обмотку статора. Вращающееся поле статора индуцирует в стержнях пусковой обмотки ЭДС и в этих стержнях возникают токи. В результате взаимодействия этих токов с вращающимся полем статора на каждый стержень ротора действует элект
уществует несколько способов пуска синхронного двигателя, но практическое применение получил асинхронный способ. Для его реализации в пазах полюсных наконечников ротора располагают стержни пусковой короткозамкнутой обмотки, выполненной аналогично обмотке короткозамкнутого ротора. Обычно стержни этой обмотки делают из латуни или меди и замыкают с двух сторон медными кольцами. Для пуска синхронного двигателя замыкают обмотку возбуждения ОВ на резистор r (рисунок), включают в трехфазную сеть обмотку статора. Вращающееся поле статора индуцирует в стержнях пусковой обмотки ЭДС и в этих стержнях возникают токи. В результате взаимодействия этих токов с вращающимся полем статора на каждый стержень ротора действует элект