ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 04.02.2024
Просмотров: 521
Скачиваний: 1
СОДЕРЖАНИЕ
1.Основное уравнение движения электропривода.
2.Основные понятия об устойчивости электропривода.
3.Определение времени пуска и торможения электропривода
6.Расчет нагрузочных диаграмм и тахограмм.
8.Расчет и выбор мощности двигателей при длительном режиме работы
10.Механические характеристики двигателей постоянного тока последовательного возбуждения.
11.Способы торможения двигателей постоянного тока последовательного возбуждения.
12.Способы регулирования скорости двигателей постоянного тока независимого возбуждения.
13.Способы регулирования скорости двигателей постоянного тока независимого возбуждения.
15.Расчет тормозных сопротивлений двигателя постоянного тока независимого возбуждения (RДТ, RП).
17.Расчет пусковых сопротивлений в приводах с двигателями постоянного тока независимого возбуждения.
19.Каскадные схемы включения АД. Регулирование скорости асинхронных двигателей в системе АВК.
20.Расчет ступени противовключения для асинхронного двигателя.
21.Торможение асинхронного двигателя противовключением.
22.Регулирование скорости асинхронных двигателей.
23.Расчет пусковых сопротивлений асинхронных двигателей.
26.Регулирование скорости путем шунтирования обмотки якоря.
27.Расчет и выбор основного электрооборудования вентильного электропривода.
28.Механические характеристики вентильного электропривода.
30.Выпрямительный и инверторный режим работы тиристорного электропривода постоянного тока.
31.Управление выпрямленным напряжением в системе ТП-Д.
32.Регулирование скорости двигателей в системе ТП-Д. Расчет механических характеристик.
33.Регулирование выпрямленного напряжения в системе ТП-Д.
34.Энергетические характеристики системы ТП-Д
36.Регулирование скорости в системе ТПЧ-АД
37.Регулирование скорости в системе ТПЧ-СД.
38.Переходные процессы при пуске двигателя
39.Механические характеристики синхронных двигателей. Пуск в ход и торможение синхронных двигателей.
40.Особенности пуска синхронных двигателей. Разновидности схем пуска синхронных двигателей.
Одним из основных узлов ПЧ является автономный инвертор АИ, свойства которого определяют характеристику всего ПЧ в целом. В связи с этим рассматриваются основные типы инверторов, применяемых в полупроводниковых ПЧ для электропривода.
Механические характеристики при изменении частоты, напряжения, частоты и напряжения одновременно по закону U/f = const изображены на рисунках 2, 3, 4 соответственно.
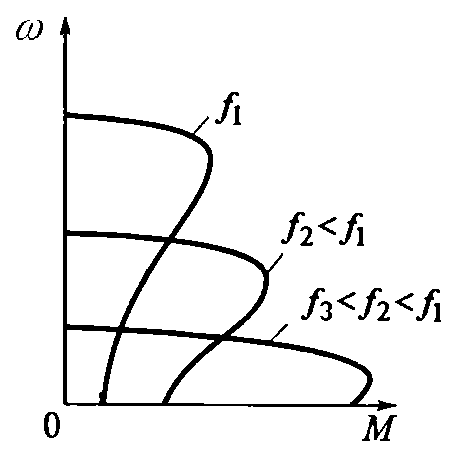
Рисунок 2
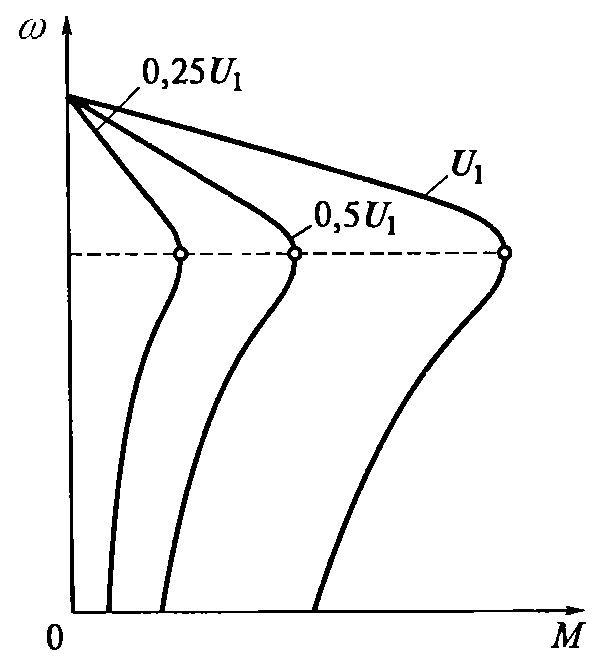
Рисунок 3
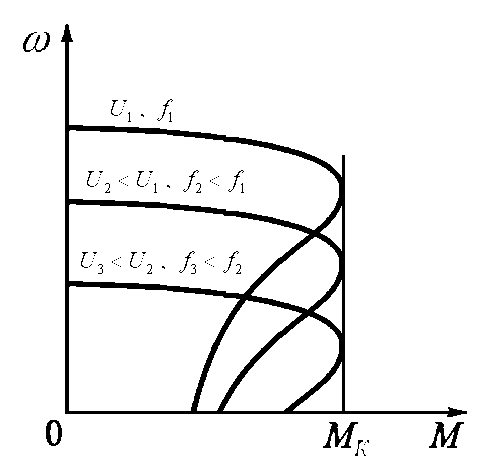
Рисунок 4
36.Регулирование скорости в системе ТПЧ-АД
При помощи тиристорного преобразователя частоты возможно осуществлять следующие способы регулирования скорости асинхронного двигателя.
1. Изменением напряжения
Изменение напряжения асинхронного двигателя приводит к изменению критического момента, тогда как критическое скольжение остается постоянным. В случае ненасыщенной магнитной цепи машины критический момент изменяется пропорционально квадрату напряжения.
На рисунке 1 показаны механические характеристики двигателя при различных напряжениях на зажимах статора
2. Частотное регулирование скорости
Применение частотного регулирования скорости значительно расширяет возможности использования асинхронных электроприводов в различных отраслях промышленности. В первую очередь это относится к установкам, где производится одновременное изменение скорости нескольких асинхронных двигателей, приводящих в движение, например, группы текстильных машин, конвейеров, рольгангов и т. п. Используется частотный принцип регулирования скорости асинхронных двигателей и в индивидуальных установках, особенно в тех случаях, когда необходимо получить от механизма высокие угловые скорости, например, для центрифуг, шлифовальных станков и т. д. На выходе преобразователя, как правило, меняется не только частота
Законы частотного управления:
-
 (рисунок 3);
(рисунок 3); -
 (рисунок 4);
(рисунок 4); -
 (рисунок 5).
(рисунок 5).

Рисунок 1
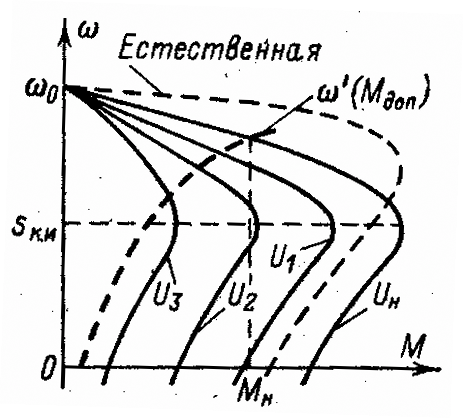
Рисунок 2

Рисунок 3
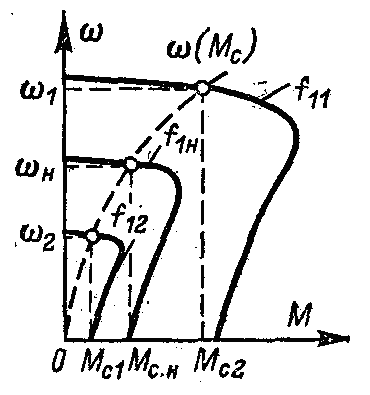
Рисунок 4
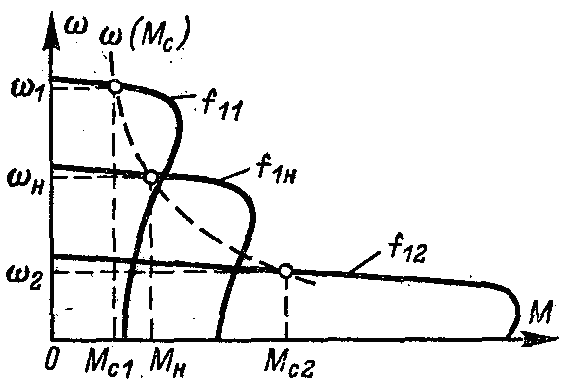
Рисунок 5
37.Регулирование скорости в системе ТПЧ-СД.
Желаемый закон регулирования скорости проще всего реализовать при векторном принципе регулирования координат СД. Векторный принцип основан на принудительной взаимной ориентации векторов потокосцеплений и токов двигателя в полярной или декартовой системе координат в соответствии с заданным законом регулирования.
Информация о текущих значениях модуля и пространственного положения векторов переменных синхронного двигателя может быть получена как прямым их измерением с помощью соответствующих датчиков, так и косвенно на основе математической модели двигателя. Конфигурация и сложность такой модели определяется техническими требованиями к электроприводу. При сложности вычислительных операций и алгоритмов управления электроприводом достоинство систем с косвенным регулированием – в простоте технических решений и, соответственно, в практической надежности. Поэтому в современных и наиболее совершенных частотно-регулируемых электроприводах, где системы программного управления реализованы на основе микропроцессорной техники, информация о векторах потокосцеплений электрической машины получается косвенным путем на основе ее математических моделей.
Система имеет два канала управления: вектором потокосцепления ротора и угловой скорости ротора. Двухканальная система управления дает возможность осуществить независимое регулирование модуля вектора потокосцепления ротора и скорости ротора при сохранении прямой пропорциональности между моментом, развиваемым двигателем, и намагничивающей силой статора.
Для теоретического анализа статических и динамических режимов СД целесообразно в структурной схеме СД выделить четыре контура - для токов статора и для потокосцеплений ротора. Для выявления этих контуров по продольной оси рассмотрим дифференциальные уравне
ния:
СД представляет собой нелинейный многосвязный объект с наличием внутренних перекрестных обратных связей. В частности, в контурах токов статора имеются внутренние обратные связи по ЭДС вращения
Регулятор скорости также имеет ПИ структуру. Однако в переходных режимах работает только П - часть, что снижает или полностью устраняет в них перерегулирование. В статических режимах работы для исключения просадки скорости подключается интегральная составляющая.
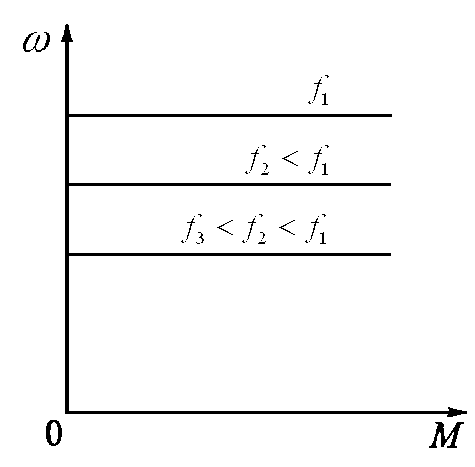
Рисунок 1
38.Переходные процессы при пуске двигателя
1. Электромагнитные переходные процессы в обмотке возбуждения.
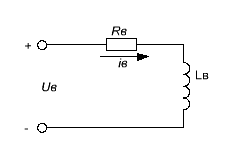
Исходное уравнение по II закону Кирхгофа:
Рисунок 1
; (2)
Получаем:
Если
Во времени график нарастания тока возбуждения выглядит как на рисунке 2.
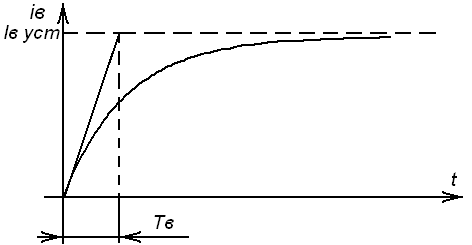
Рисунок 2
Влияние скорости возбуждения.
Чтобы форсировать изменение I в обмотке возбуждения генератора, надо:
1) параметрический способ за счет изменения параметров в цепи возбуждения генератора.
Добавим последовательно с обмоткой возбуждения добавочное сопротивление

Рисунок 3
Новое значение постоянной времени примет вид:
И будет иметь вид изображенный на рисунке 4
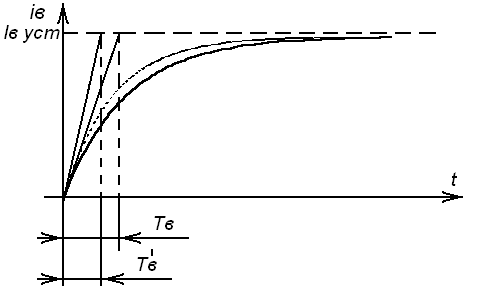
Рисунок 4
Значение коэффициента