ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 04.02.2024
Просмотров: 511
Скачиваний: 1
СОДЕРЖАНИЕ
1.Основное уравнение движения электропривода.
2.Основные понятия об устойчивости электропривода.
3.Определение времени пуска и торможения электропривода
6.Расчет нагрузочных диаграмм и тахограмм.
8.Расчет и выбор мощности двигателей при длительном режиме работы
10.Механические характеристики двигателей постоянного тока последовательного возбуждения.
11.Способы торможения двигателей постоянного тока последовательного возбуждения.
12.Способы регулирования скорости двигателей постоянного тока независимого возбуждения.
13.Способы регулирования скорости двигателей постоянного тока независимого возбуждения.
15.Расчет тормозных сопротивлений двигателя постоянного тока независимого возбуждения (RДТ, RП).
17.Расчет пусковых сопротивлений в приводах с двигателями постоянного тока независимого возбуждения.
19.Каскадные схемы включения АД. Регулирование скорости асинхронных двигателей в системе АВК.
20.Расчет ступени противовключения для асинхронного двигателя.
21.Торможение асинхронного двигателя противовключением.
22.Регулирование скорости асинхронных двигателей.
23.Расчет пусковых сопротивлений асинхронных двигателей.
26.Регулирование скорости путем шунтирования обмотки якоря.
27.Расчет и выбор основного электрооборудования вентильного электропривода.
28.Механические характеристики вентильного электропривода.
30.Выпрямительный и инверторный режим работы тиристорного электропривода постоянного тока.
31.Управление выпрямленным напряжением в системе ТП-Д.
32.Регулирование скорости двигателей в системе ТП-Д. Расчет механических характеристик.
33.Регулирование выпрямленного напряжения в системе ТП-Д.
34.Энергетические характеристики системы ТП-Д
36.Регулирование скорости в системе ТПЧ-АД
37.Регулирование скорости в системе ТПЧ-СД.
38.Переходные процессы при пуске двигателя
39.Механические характеристики синхронных двигателей. Пуск в ход и торможение синхронных двигателей.
40.Особенности пуска синхронных двигателей. Разновидности схем пуска синхронных двигателей.
В двигательном режиме при угловой скорости ниже синхронной поток энергии направлен от выпрямителя к инвертору и ток и напряжение выпрямительной цепи имеют одинаковое направление.
Момент АД равен:
где
Зависимость
А момент определяется следующим выражением:
 ,
,где
Формула дает приближенное аналитическое выражение для механической характеристики АД в схеме вентильного каскада.
Скорость холостого хода и соответствующее ей скольжение зависят от угла
Регулировочные свойства каскада при уменьшении его скорости (уменьшении угла
где
Сверху диапазон регулирования ограничен падением напряжения в элементах цепи.
20.Расчет ступени противовключения для асинхронного двигателя.
Расчет ступени противовключения производится графоаналитическим методом.

∆ w соответствует сопротивлению двигателя. По пропорции определяется Rпр.
Сопротивление противовключения выбираем исходя из допустимого тормозного момента.
21.Торможение асинхронного двигателя противовключением.
Производится при переключении двух любых фаз. Магнитное поле при этом будет вращаться противоположно вращению ротора, а электромагнитный момент будет тормозным.
В
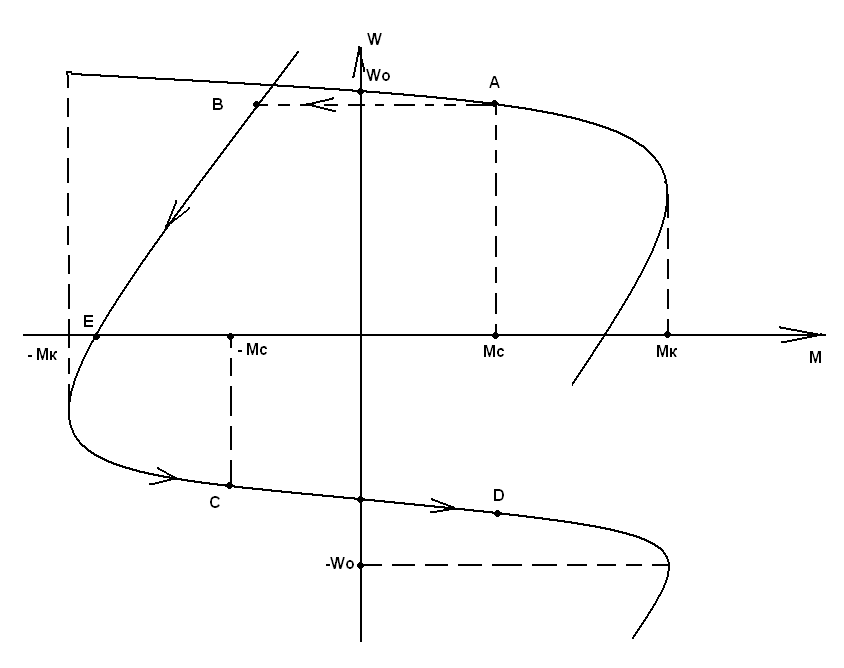 точке Е двигатель отключается от сети.
точке Е двигатель отключается от сети.Для Мс реактивного – АВС.
Для Мс активного – АВСD.
Для АД с фазным ротором в момент противовключения в цепь ротора вводится сопротивление противовключения для ограничения тока ротора.
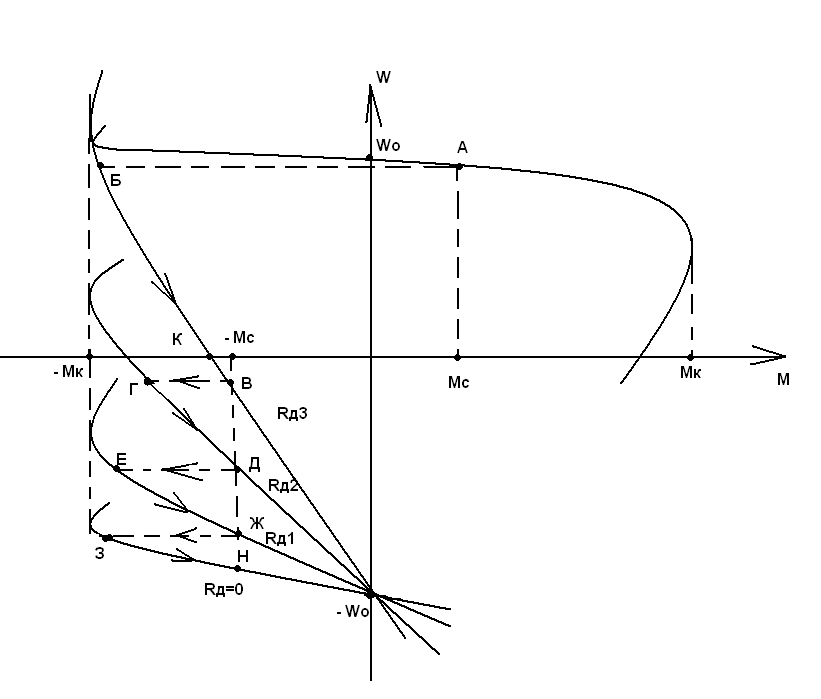
Rд3=Rкр+Rд
После изменения направления вращения двигатель может быть разогнан до Wc по А-Б-В-Г-Д-Е-Ж-З-Н. В случае торможения до «0» в точке К двигатель отключается от сети.
Способ торможения противовключением эффективен, прост, обеспечивает малое время торможения. Недостаток – значительные потери энергии
22.Регулирование скорости асинхронных двигателей.
Если проанализировать влияние параметров асинхронного двигателя на его механические характеристики:

то можно сделать вывод о возможности регулирования скорости АД:
-
Изменением числа пар полюсов; -
Изменением сопротивления в цепи ротора; -
Изменением напряжения U1; -
Изменением сопротивления в цепи статора; -
Изменением частоты подводимого напряжения.
-
Регулирование скорости АД изменением числа пар полюсов.
Изменение числа пар полюсов обеспечивает ступенчатое регулирование синхронной скорости

К достоинству этого способа можно отнести простоту его реализации и отсутствие больших потерь скольжения. Главным его недостатком является ограниченное число ступеней регулирования.
-
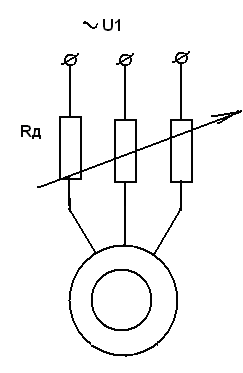
Регулирование скорости АД изменением сопротивления в цепи ротора.
Этот способ применим только для АД с фазным ротором.
При введении и изменении сопротивления в цепи ротора изменяется критическое скольжение АД а МК и w0 остаются без изменений.
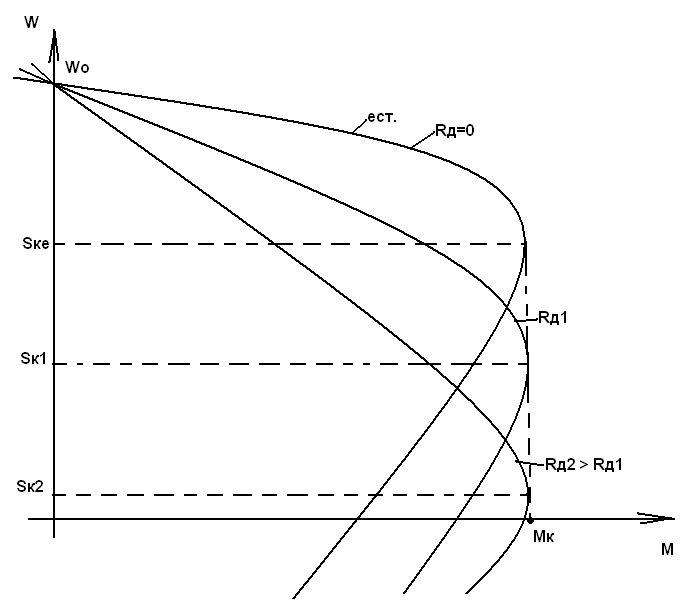
Этот способ отличает простота и дешевизна. Область применения ограничена механизмами у которых момент нагрузки изменяется в зависимости от скорости в небольших пределах.
-
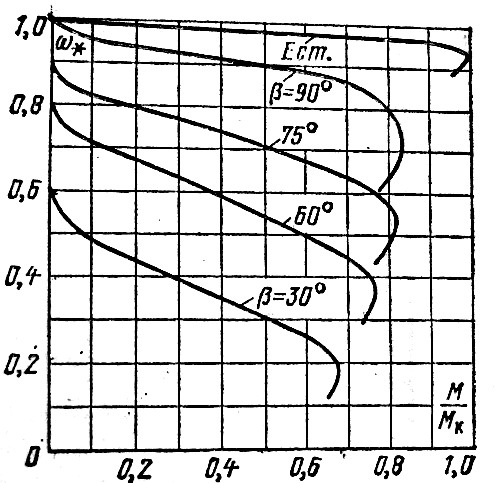
Регулирование скорости АД изменением напряжения.
Данный способ применяется преимущественно для АД с короткозамкнутым ротором. Изменение U1 приводит к изменению критического момента, без изменения w0 и SК.


При снижении напряжения, подводимого к статору, изменяется поток, что при МС=const приводит к увеличению тока и возрастанию потерь. Поэтому приведенный способ регулирования применяется для механизмов, имеющих вентиляторную нагрузку (т.е. при w МС). Для таких механизмов данный способ нашел большое применение при использовании электродвигателей мощностью 20…30 кВт.
-
Регулирование скорости АД изменением сопротивления статора.
Регулирование скорости по этому способу возможно в сторону снижения. Способ очень схож с регулированием скорости изменением напряжения. При изменении R1 изменяется как критический момент, так и критическое скольжение.
Применяется преимущественно для АД с короткозамкнутым ротором.
-
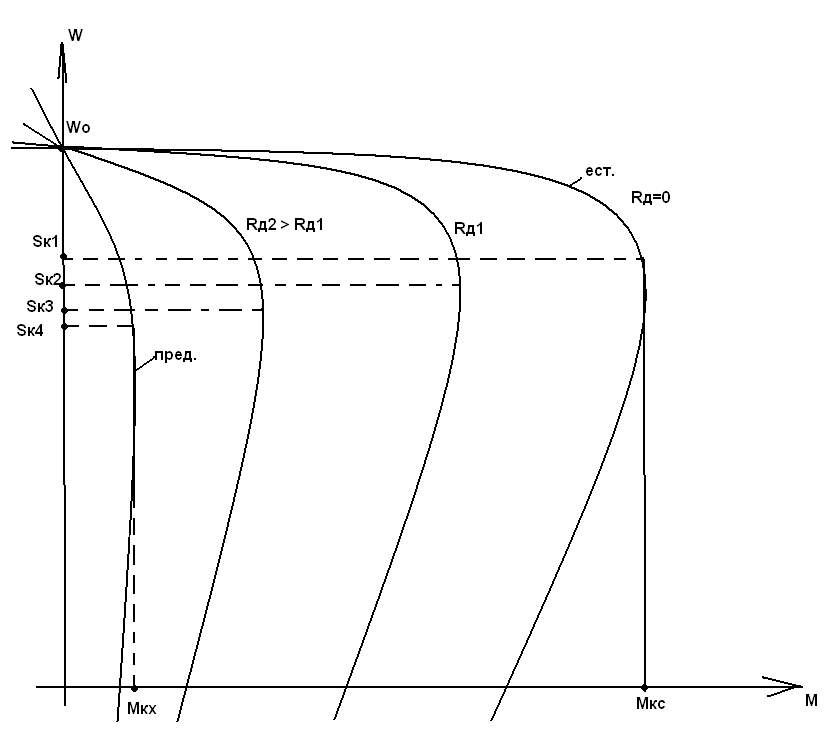
Регулирование скорости АД изменением частоты подводимого напряжения.
Этот способ применим как для отдельных АД, так и для АД приводящих во вращение группы механизмов. Возможность регулирования скорости вытекает из выражения:
Следует учитывать, что при изменении частоты изменяется и индуктивное сопротивление АД, поэтому будет изменяться значения
 и характеристики будут иметь следующий вид:
и характеристики будут иметь следующий вид: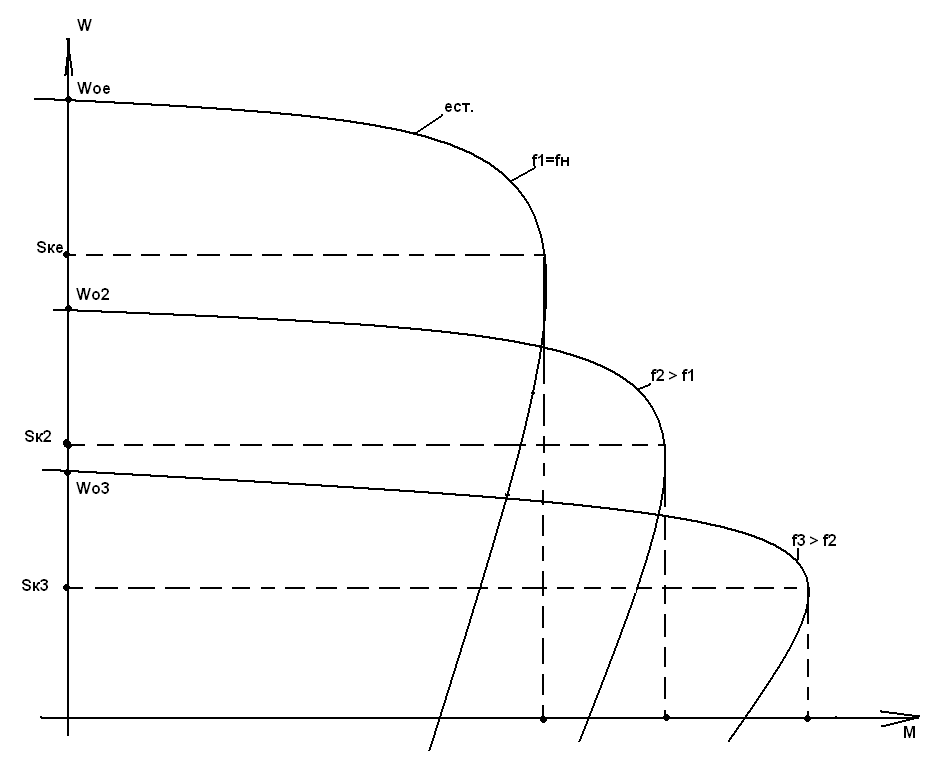
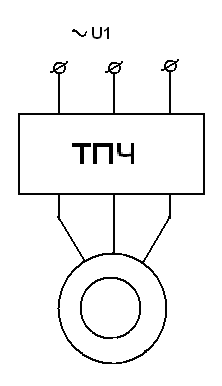
Основным недостатком электроприводов с частотным управление является необходимость использования преобразователей частоты.
Чтобы критический момент был постоянным, необходимо поддерживать постоянным следующее соотношение
23.Расчет пусковых сопротивлений асинхронных двигателей.
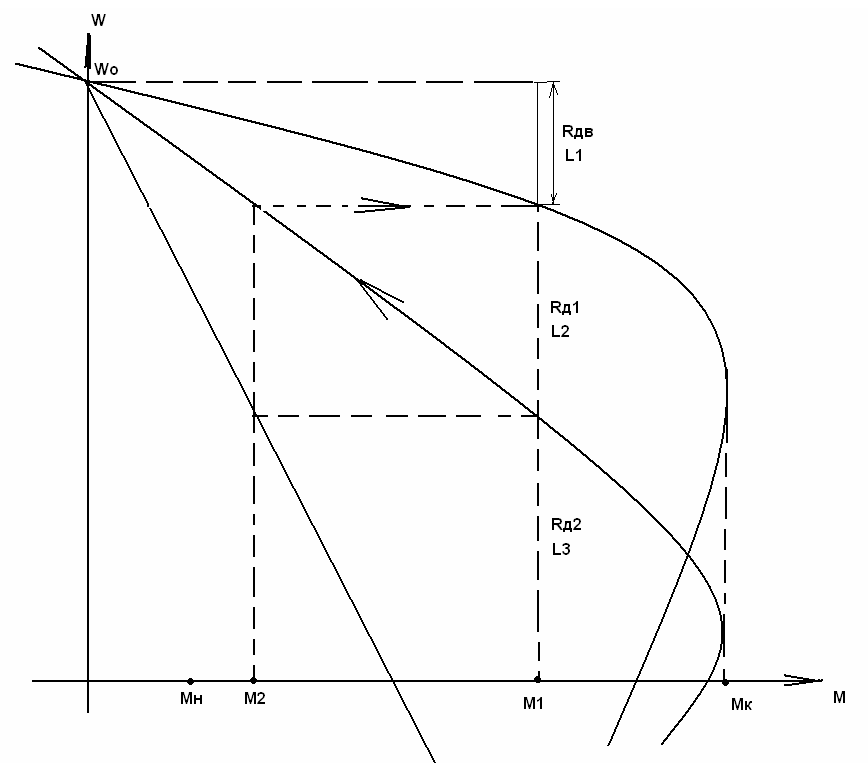
Расчет производится графоаналитическим методом. Строятся характеристики в зависимости от желаемого количества ступеней. Выбираются моменты
∆ w соответствует сопротивлению двигателя. Составляем пропорцию и находим Rд1 и Rд2.
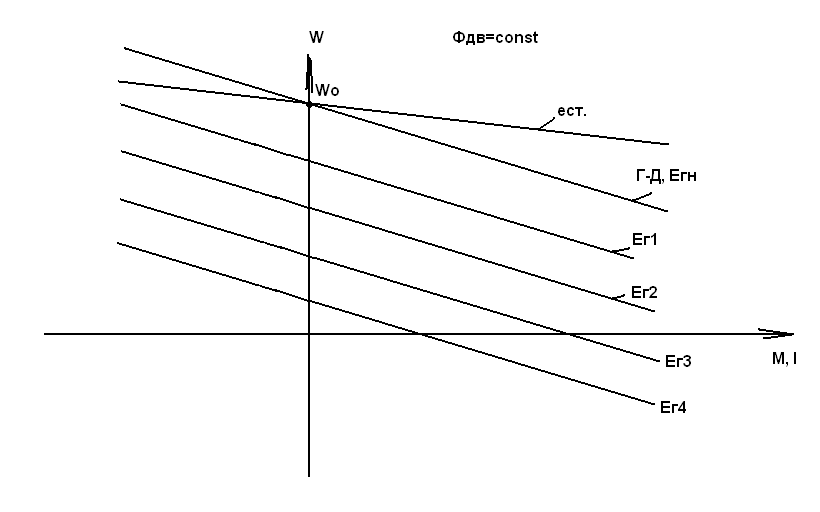
24.Регулирование скорости электродвигателей в системе Г-Д. Механические характеристики системы Г-Д. Диапазоны регулирования.
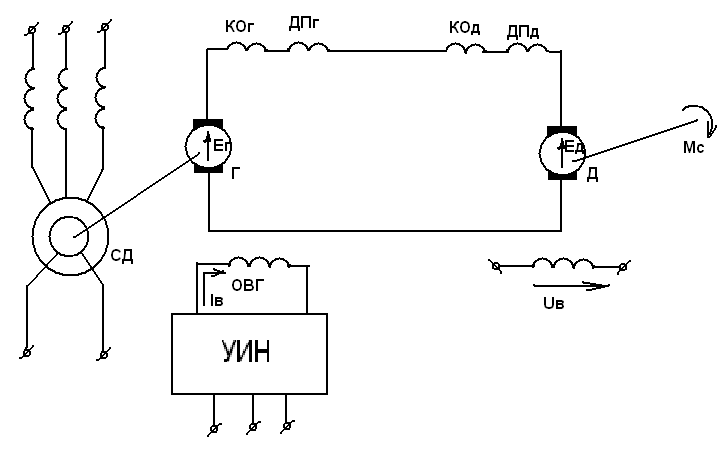
Система Г-Д представляет из себя регулируемый источник постоянного тока на базе генератора, приводимого во вращение, обычно при помощи синхронного двигателя (возможен привод от любого механического источника энергии).
На рисунке приведена регулировочная характеристика генератора постоянного тока независимого возбуждения, из которой следует, что в диапазоне изменения
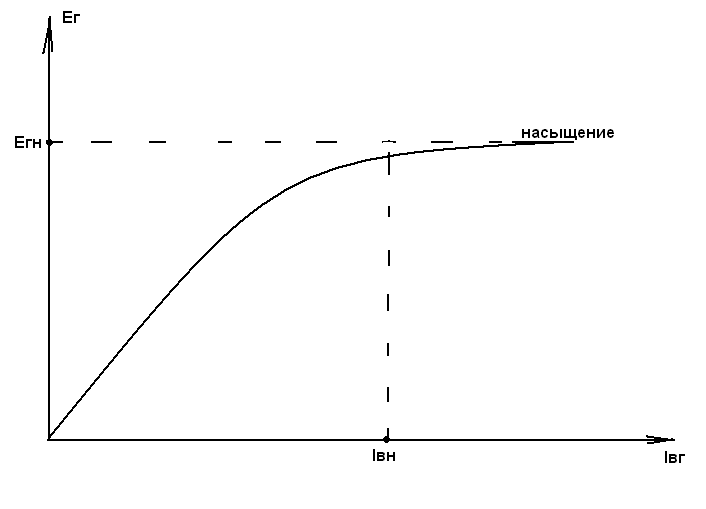
Рассмотрим механические характеристики.
От куда следует, что характеристики двигателя будут несколько мягче по отношению к естественной.
Семейство механических характеристик приведено на рисунке: