Файл: Литература 25 Краткая история развития эргономики 27.doc
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 12.12.2023
Просмотров: 1004
Скачиваний: 1
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
СОДЕРЖАНИЕ
Эргономика и ее место в системе наук
Краткая история развития эргономики
Принципы эргономического анализа трудовой деятельности
5. Эргономические основы проектирования техники
Эргономические основы организации рабочего места
Оптимизация средств и систем отображения информации
Оптимизация рабочих движений и органов управления
Учет факторов среды при оптимизации системы «человек—машина»
В зависимости от цели и смыслового содержания двигательного акта один из уровней берет на себя роль ведущего, координирующего действия нижележащих фоновых уровней. Во всяком движении осознается только ведущий уровень. Выработка двигательного навыка — это процесс формирования в ходе обучения и тренировки уровневого состава движения, выделения ведущего уровня и срабатывания между собой всех вовлеченных в управление уровней. Необходимым условием успешного изучения двигательных актов является создание адекватного метода, позволяющего регистрировать и анализировать пространственно-временную развертку движения, весь ход двигательного акта «по всему моторному аппарату тела». В исследованиях исполнительной деятельности, направленных на выявление объективных индикаторов процесса формирования сенсомоторного образа пространства и структурыдействия, использовался микроструктурный метод анализа, суть которого состоит в выделении быстротекущих компонентов целостных психических актов и в анализе их взаимоотношения. Использование этого метода при исследовании произвольных пространственных действий позволило вскрыть структуру пространственного действия; проследить динамику ее становления и развития в различных условиях протекания действий; выделить ряд компонентов-стадий: формирования программы, реализации, контроля и коррекций, составляющих структуру действия, проследить динамику их развития, соотношения их на разных этапах освоения действия, а также изменения, происходящие внутри выделенных компонентов целостного действия. (Описание методики исследования см. в главе 3).
Экспериментальная ситуация предусматривала исследование формирования инструментального пространственного действия в различных условиях. В стабильных условиях маршруты требуемого движения были одинаковой величины и сложности. В динамических условиях маршруты отличались числом опорных элементов и числом пространственных составляющих движения. В условиях инверсии вводилось рассогласование (полное или частичное) между перцептивным и моторным полями. Инверсия вводилась после выработки навыка в условиях нормы.
В результате исследования было обнаружено, что в процессе формирования навыка (стабильные условия, норма) наблюдается сложная динамика во взаимоотношениях между отдельными стадиями целостного действия. Во-первых, в процессе освоения пpoстранственного действия наблюдается уменьшение времени каждой выделенной стадии; во-вторых, сокращение времени в каждой стадии происходит неравномерно, в-третьих, по мере тренировки происходит перераспределение времени между выделенными стадиями. Неравномерность темпа сокращения времени в выделенных стадиях свидетельствует о том, что все компоненты целостного действия совершенствуются неодинаково. В исследовании обнаружена последовательность формирования компонентов пространственного действия. Быстрее всего складывается стадия формирования моторных программ, за ней следует стадия контроля и коррекций, обе они формируются на фоне постепенного уменьшения времени, которое занимает стадия реализации моторных программ. Лишь после того как оба когнитивных компонента сформировались, видимо, возможно, последнее сокращение времени выполнения действия в целом. И это сокращение происходит за счет его исполнительной части. Перераспределение времени между стадиями внутри целостного действия на разных этапах формирования свидетельствует о том, что каждое новое упражнение — это новый процесс решения задачи, процесс изменения и совершенствования средств и способов ее решения.
При введении инверсии как средства разрушения сформированного пространственного действия было показано, что субъективно процесс формирования навыка в условиях инверсии переживается как значительно более трудный в сравнении с нормой. Формирование навыка в любом виде инверсии (полной или частичной) облегчает усвоение любого другого вида инверсии. Переход oт нормы к любому виду инверсии происходит с большими трудностями и требует большего времени, чем обратный переход. Сопоставление хода формирования совместимого и инвертированного инструментального пространственного действия показывает, что при переходе к работе в условиях инверсии наблюдаются эффекты переноса и интерференции (рис. 10).
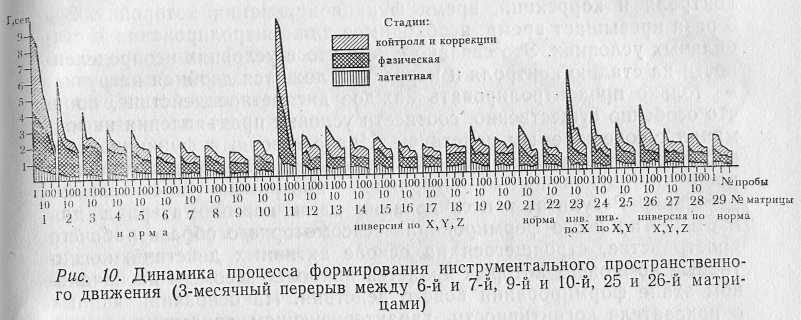
В ходе перестройки навыка наблюдается различная динамика поведения функциональных компонентов, анализ которой позволяет заключить, что более быстрое по сравнению с нормой формирование инвертированного навыка возможно за счет переноса фазических, скоростных черт пространственного действия.
Стадия реализации почти полностью сохранила свои характеристики. Инверсия перцептивного и моторного полей незначительно отразилась на скоростных характеристиках фазических элементов действия. В случае когнитивных компонентов мы имеем дело не с переносом, а с интерференцией образа пространства, построенного в условиях нормы, и образа, который еще только строится в условиях инверсии. Это сказалось на характере когнитивных элементов. Более того, именно это же сказалось и на характеристиках стадий реализации на начальных этапах построения нового действия в новых условиях. Фазическая часть действия вновь взяла на себя когнитивные функции. При помощи движения руки испытуемые прощупывают новое пространство и находят признаки этого пространства. Когда построен новый сенсомоторный образ пространства, стадия реализации освобождается от когнитивных функций и начинает работать, как при совместимом пространственном действии, но теперь она реализует другие программы. Когнитивные компоненты продолжают совершенствоваться уже без видимого участия стадии реализации. Таким образом, явления переноса и интерференции имеют разную природу. Перенос происходит за счет исполнительной части действия, а интерференция — за счет когнитивных компонентов, однако явления эти не взаимоисключающие, они взаимодействуют в каждом пространственном действии.
Динамические условия предъявления информации сказались в основном на характеристиках когнитивных компонентов исследуемого процесса аналогично изменениям, зарегистрированным при введении инверсии. Особенно резко меняющиеся условия предъявления информации сказались на характеристиках стадии контроля и коррекций, время функционирования которой в 2— 3 раза превышает время, необходимое для контролирования в стабильных условиях. Это связано с тем, что в условиях неопределенности на стадию контроля и коррекций ложится двойная нагрузка: не только проконтролировать каждое дискретное действие, но и, что особенно существенно, соотнести условия предъявления информации с совершаемым действием. Иначе говоря, в функции контроля входит не только проверка результата действия, но и контроль за адекватностью выбранной программы предстоящего действия. Результаты исследования дали новый материал для изучения процесса формирования сенсомоторного образа рабочего пространства, строящегося на основе активных действий, когнитивный компонент которых является наиболее весомым на начальном этапе формирования нового действия. На основании данных о показателе когнитивности, характеризующем динамику временных отношений когнитивных и исполнительных компонентов и выражающемся через отношение суммы времени когнитивных компонентов к исполнительному, явствует, что по мере овладения навыком удельный вес когнитивных компонентов в целостном действии уменьшается. Когда построен образ сенсомоторного пространства, функция когнитивных компонентов сужается до программирования осуществляемого действия, что, естественно, сказывается на уменьшении показателя когнитивности. По сравнению с динамичными условиями в стабильных условиях предъявления информации уменьшение значений показателя когнитивности выражено за счет того, что в статике функция контроля в большей степени редуцирована.
На начальных этапах формирования нового действия, в каких бы условиях оно ни протекало, границы между стадиями нечеткие. Разброс между составляющими X, Y, Z внутри каждой стадии настолько велик (в отдельных случаях до секунды), что создается впечатление как бы вхождения одной стадии в другую. Это положение вполне соответствует тезису, сформулированному в контексте системно-структурных исследований, согласно которому менее развитая структура характеризуется меньшей дифференцированностью ее компонентов. Сказанное позволяет сделать два предположения: первое — на начальных этапах обучения возможны параллельное выполнение программы и ее реализация, а также peализация и контролирование; второе, вытекающее из первого, состоит в том, что на начальных этапах формирования навыка выполнение программы, ее реализация и контроль идут отдельно по составляющим движения. Иными словами, происходит последовательное планирование движения по каждой координате. Аналогичным образом последовательно осуществляются реализация и контролирование. Освоенное действие характеризуется значительным уменьшением разброса, а так как разброс характеризует качество действия (его пространственность),то на конечных этапах обучения сформированное действие приобретает черты более четкой функциональной структуры. И если на начальных этапах обучения функциональная структура действия по показателю пространственности сопоставима для различных условий протекания действия, то в конце обучения оказываются сопоставимы действия, формируемые в динамических условиях и в условиях инверсии, которые по значениям показателя разброса в 2— 3 раза превосходят значения этого показателя в условиях нормы. Следовательно, введение инверсии или неопределенности неизменно вызывает ухудшение качества действия, выражающееся в увеличении значений показателя разброса. Иначе говоря, качество действия чрезвычайно чувствительно к различным изменениям, вносимым в условия протекания действия.
Знание функциональной структуры действия, исследование динамики ее формирования и становления, установление взаимосвязей и взаимоотношений между компонентами исследуемого объекта открывают возможности контроля за процессом формирования и оптимизации движений и действий.
Изменение удельного веса компонентов в структуре действия как в процессе его формирования, так и под влиянием тех или иных изменений, внесенных в условия его протекания, свидетельствует о том, что превалирование того или иного типа регулирования двигательными актами зависит в основном от условий, в ко-
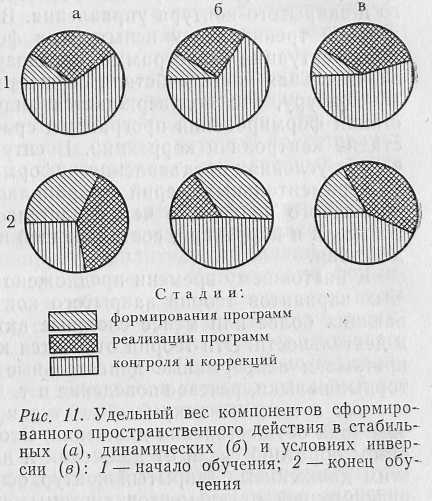
торых действие протекает, и от степени освоенности, обученности. На рис. 11 представлены удельные веса компонентов целостного действия в различных условиях его протекания и на разных этапах его формирования.
Соотношение компонентов функциональной структуры целостного действия в начале его формирования сходно независимо от того, в каких условиях протекает действие. В конце формирования сходное соотношение компонентов в структуре действия отмечается у действий, формируемых в динамических и инвертированных условиях; действие, формируемое в условиях нормы, имеет совершенно отличную от них структуру. Ситуация инверсии и динамики и ситуация нормы могут быть сопоставлены в терминах открытого и закрытого контура управления. В условиях нормы после длительной тренировки у испытуемых формировались симультанный образ ситуации и программа, организующая моторный ответ, т. е. значительная часть действия осуществлялась как бы по открытому контуру, что подтверждается значительным удельным весом стадии формирования программ и сравнительно небольшим весом стадии контроля и коррекций. В ситуации инверсии и в динамических условиях предъявления информации в течение проведенных экспериментальных серий сохранилась регуляция по принципу замкнутого контура, о чем свидетельствует удельный вес стадии контроля и коррекций, составляющей примерно 50% от целостного действия.
К настоящему времени предложено большое число разнообразных вариантов теорий закрытого контура регулирования, описывающих более или менее сложные акты человеческого поведения и деятельности. Эти теории относятся к таким процессам, как дискретные и непрерывные двигательные процессы, перцептивно-моторные навыки, речевое поведение и т. д. Общие черты этих теорий состоят в том, что закрытый контур предполагает знание субъектом хода осуществления движения. Это знание получается посредством обратной связи от движения и направляется на управление этим движением. Закрытый контур основывается на контроле за информацией от элементов системы, «подсчете» и учете ошибок, указывающих на направление или степень отклонения выхода системы за пределы заданного, исправлении этих ошибок. Основная функция систем закрытого контура состоит в минимизации этих ошибок.