Файл: Литература 25 Краткая история развития эргономики 27.doc
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 12.12.2023
Просмотров: 1027
Скачиваний: 1
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
СОДЕРЖАНИЕ
Эргономика и ее место в системе наук
Краткая история развития эргономики
Принципы эргономического анализа трудовой деятельности
5. Эргономические основы проектирования техники
Эргономические основы организации рабочего места
Оптимизация средств и систем отображения информации
Оптимизация рабочих движений и органов управления
Учет факторов среды при оптимизации системы «человек—машина»
В этих теориях, равно как и в экспериментальных исследованиях, на которых они основывались, не уделялось достаточного внимания анализу предметного содержания деятельности. Да и сами исследуемые двигательные акты, как правило, были чрезвычайно элементарны и по своей сложности редко превосходили стандартные варианты стимульно-реактивных схем изучения движения. Средства регистрации двигательных актов предназначались преимущественно для фиксации физиологических процессов, происходящих при реализации движений.
Обращает на себя внимание и интерпретация полученного материала, которая ведется преимущественно в терминах теории автоматического регулирования, кибернетики. Даже сами наименования — теория открытого, теория закрытого контура — свидетельствуют о влиянии идей и методов кибернетики. В этом влиянии, разумеется, нет ничего предосудительного, и некоторые полезные аналогии с техническими системами и управлением исполнительными действиями человека действительно помогли прояснить многие проблемы и привели к постановке новых проблем. Н. Е. Введенский когда-то писал: «К сожалению, построения живого мира настолько сложны и оригинальны, что смысл их выясняется обыкновенно лишь после того, как физики и техники придут другими путями к тем же результатам» [15, с. 574]. Но он же предупреждал о том, что, наблюдая за деятельностью какой-либо ткани или органа, «не следует упускать из виду, что каждый раз имеют дело с живыми единицами, поставленными в своей деятельности в условия, общие для всех живых организмов» [там же, с. 566]. Имеется большой соблазн по аналогии с техническими устройствами рассматривать тот или иной орган или функцию как механизм, предназначенный только для известной работы, т. е. вне контекста условий его жизнедеятельности. Однако всякая аналогия имеет свои границы и пределы. Аналогии между глазом и камерой-обскурой или фотоаппаратом давно изжили себя. Речь идет не о том, что теории открытого или закрытого контура уже постигла та же участь, а о том, чтобы выработать еще более широкий взгляд на человеческое движение и действие, включая их в контекст жизнедеятельности. В настоящее время созрели как теоретические, так и методические предпосылки для преодоления оппозиции между теориями открытого и закрытого контура. Теоретические предпосылки состоят в том, что во многих областях исследования психической деятельности успешно преодолевается
технологический, инженерный подход, в том числе и в его современном информационно-кибернетическом варианте. Методические предпосылки состоят в том, что благодаря использованию ЭВМ на линии эксперимента появились принципиально новые возможности регистрации и анализа движений.
В качестве примера приведем исследование [52], предметом которого был анализ соотношений когнитивных и исполнительных компонентов инструментального действия. Экспериментальная ситуация предусматривала быстрое и точное горизонтальное движение к цели, представляющей собой световой квадрат, равный по размеру управляемому квадрату и появляющийся справа и слева от стартовой позиции на горизонтальной оси телевизионного индикатора по программе от ЭВМ. Регистрировались временные и скоростные характеристики движения.
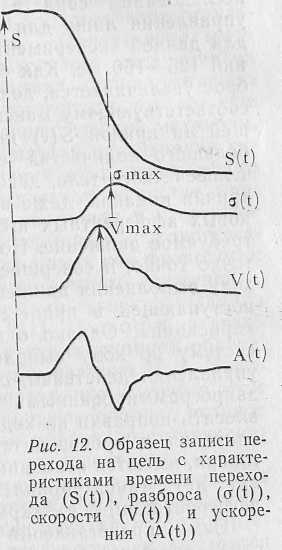
На рисунке 12 представлен образец записи перехода на цель, включающий в себя запись параметрического графика зависимости пути от времени, данные по скорости и ускорению совершаемого движения. Данный вид кривых S (t), V(t), A(t ) описывает движения, направленные на быстрое и точное совмещение управляемого пятна с целью. Скорость движения возрастает до середины пути, а затем начинает монотонно падать вплоть до начала корректирующих движений, подводящих управляемое пятно к цели. Изменение скорости движения, в свою очередь, вызвано тем, что усилие, прилагаемое для перемещения руки в пространстве и соответственно орудия, управляемого ею, изменяется во времени. Характер изменения этого усилия описывается изменением ускорения движения во времени A(t), где можно выделить ускоренную часть, соответствующую начальной части движения, когда скорость нарастает от 0 до максимума, и части движения, когда ускорение имеет отрицательный знак. Одновременно для каждой группы реализаций (в зависимости от амплитуды перемещения) был вычислен средний квадратичный разброс (а), т. е. определены участки максимального и минимального отклонения от идеальной кривой. Как показал анализ, максимальное отклонение на кривой (а) отмечено в середине пути там, где, как видно на кривой скорости, она уже достигла своего максимума. Иначе говоря, разброс минимален в начале и конце пути. Отсюда можно предположить. что движения в самом начале своего пути, соответствующие по времени фазе >нарастания ускорения и характеризующиеся минимальным разбросом (а), совершаются по четко отработанной программе для данной группы движений.
Эти данные согласуются с данными представителей программного или открытого типа управления движениями, постулирующих наличие набора моторных программ, которые могут синтезироваться в желаемое движение, охватить его целиком и которые не зависят от обратной афферентации. Результаты проведенного исследования свидетельствуют о наличии программного типа управления лишь для начальной части движения, составляющей для данной экспериментальной ситуации и данной группы движений 125—150 мс. Как было .показано, средний квадратичный разброс увеличивается, доходя до своего максимума на участке пути, соответствующему максимальному значению скорости, охватывающей на кривой S (t) интервал, равный 225—275 мс. Вследствие большого количества степеней свободы кинематических цепей человеческого тела, действия реактивных и внешних сил и других причин никакая, даже наиболее точно дозированная, система пусковых афферентных импульсов не может однозначно определить требуемое движение. Но движение все-таки совершается, и достаточно точно, и совершается оно с помощью внесения поправок по ходу выполнения движения, на основе эфферентной сигнализации, поступающей в процессе двигательного акта, путем «сенсорной коррекции». Однако одних импульсов, поступающих в нервную систему по ходу выполнения движения, еще недостаточно для управления действием, они должны сопоставляться с заданными, запрограммированными их значениями, что и дает возможность вносить поправки по ходу выполнения действия; на основе такого сличения и производится коррекция двигательного акта. Иначе говоря, имеются основания для объединения в одном двигательном акте двух типов управления: программного и на основе обратной афферентации, т. е. закрытого типа управления.
Сами представления о моторной программе и об обратной связи, являющиеся центральными в этих теориях, тоже нуждаются в объяснении, тем более, что они рассматриваются в этих теориях преимущественно со стороны их физиологических механизмов. А между тем современные исследования открывают в человеческом действии такие осложнения, вариации и направления, о которых не знают биомеханика и физиология, по крайней мере в их нынешнем состоянии. Главное осложнение состоит, видимо, в том, что как программа, так и контроль являются производными от образа, равно как и образ является производным от действия с предметом. Это не логический круг, поэтому разрывать его не нужно, но понять взаимоотношения между действием и образом необходимо; без этого невозможно решить проблему построения движений. Мы не случайно привели выше высказывание И. М. Сеченова о том, что чувствования служат источниками движений не прямо, а через психику, т. е. через образ, который сам является не менее динамичным, чем регулируемое им движение.
Понимание этого обстоятельства кардинально отличает теорию Н. А. Бернштейна от теорий открытого и закрытого контура. Рассматривая функции «задающего» элемента, он совершенно справедливо ставит вопрос о происхождении макропрограммы целевого действия и о связи ее с двигательной задачей. Последняя прямо или косвенно определяется ситуацией, сложившейся к данному моменту. В качестве определяющего фактора в возникновении и формировании макропрограммы двигательного акта в теории Бернштейна выступает образ или представление результата действия (конечного или поэтапного). «Привлечение мной для характеристики ведущего звена двигательного акта понятия образа или представления результата действия, принадлежащего к области психологии, с подчеркиванием того факта, что мы еще не умеем назвать в настоящий момент физиологический механизм, лежащий в его основе, никак не может означать непризнания существования этого последнего или выключения его из поля нашего внимания. В неразрывном психофизиологическом единстве процессов планирования и координации мы в состоянии в настоящее время нащупать и назвать определенным термином психологический аспект искомого ведущего фактора, в то время как физиология может быть в силу отставания ее на фронте изучения движений... еще не сумела вскрыть его физиологического аспекта. Однако ignoramus не значит ignorabimus» [7, с. 241]. Несмотря на столь отчетливую постановку проблемы регулирующих функций образа, нельзя не отметить, что эти функции рассматриваются Н. А. Бернштейном в самом общем виде. Вполне понятно, что именно в этом пункте он апеллирует к психологическому исследованию, которое не может обойти проблему формирования образа, выступающего в функции регулятора произвольного двигательного акта.
Важным этапом в исследовании произвольных движений и навыков было обращение к их ориентировочно-исследовательским, когнитивным компонентам. А. В. Запорожец показал, что в процессе ориентировочно-исследовательской деятельности складывается образ ситуации и тех действий, которые должны быть осуществлены. Особенно существенным является вклад ориентировки на начальных стадиях формирования произвольных движений [28]. Логика исследования привела А. В. Запорожца и его сотрудников к дифференциации ориентировочно-исследовательских, пробующих и собственно-исполнительных действий. Появились новые аргументы в пользу полифункциональности движений, которые могут выполнять как исполнительные, так и когнитивные функции, что привело к созданию теории перцептивных действий [29—32], были разработаны методы микроанализа когнитивных, в том числе и перцептивных процессов. При этом собственно-исполнительные действия анализировались в самом общем виде: оценивались лишь время их реализации и точность достижения цели.
Развитие теории и методического арсенала исследования перцептивных действий позволяет поставить задачу объединения целого ряда подходов к исследованию произвольных движений и навыков: теории построения и развития движений Н. А. Бернштейиа и А. В. Запорожца, теорий открытого и закрытого контура (вместе с различными вариантами их объединения) и теории перцептивных действий.
Первая попытка такого объединения была сделана на основе методов микроструктурного анализа исполнительной и познавательной деятельности.
В качестве существенного теоретического основания необходимости и полезности объединения названных концепций выдвигалось следующее. При построении движений происходит преодоление избыточных степеней свободы кинематических цепей человеческого тела. Не лишено оснований предположение, что имеется нечто общее между задачей построения движений и задачей построения зрительного образа. При построении образа также происходит преодоление избыточных и неадекватных вариантов отображения одного и того же объекта. С точки зрения регуляции и контроля произвольных движений, видимо, иначе и не может быть, поскольку зрительная система представляет собой существенную часть регулирующего звена двигательного акта. Поэтому в регулирующем звене (кстати, не обязательно связанном только со зрительной системой) должно быть не меньшее число степеней свободы, чем в исполнительном. В противном случае ряд степеней свободы исполнительного звена обязательно будет ускользать от регулирующего [36].
Именно поэтому исходя из принципа иннервации отдельных мышц нельзя объяснить целостный акт движения, нельзя говорить об однозначных связях между иннервационными импульсами и вызываемыми ими движениями. Близкие по смыслу идеи высказывает М. Турвей [78], считающий, что целесообразные движения регулируются не жестким (заранее готовым) паттерном, а образом действия, который сам является постоянно становящейся структурой. Мало вероятно, что для каждого способа выполнения движения существует готовый регуляторный паттерн (шаблон), тем более, что без предварительного научения возможно применение многих способов выполнения движений и действий. Движение реализуется путем подгонки друг к другу координируемых структур, которые являются относительно автономными с точки зрения организации движения. Собственно становление движения может быть понято как гетерархия, в высших областях которой имеется малое количество больших и сложных координируемых структур, а в низших — большое количество маленьких и простых структур. Турвей также считает, что центральное место в организации движения занимает образ предстоящего действия или представление о нем. В соответствии с таким пониманием процесса управления движением первоначальное представление о действии обязательно должно быть неопределенным в сравнении с его окончательным представлением в исполнительных командах для мышц. Проще говоря, «образ действия» не может и не должен быть конструктивным по отношению к конкретным деталям двигательного акта. В образ действия входят обобщенная оценка позы или схемы тела и выделенные перцептивные свойства, которые могут понадобиться для управления движением, представленные также в обобщенной форме. В разворачивающемся движении «образ действия» постепенно конкретизируется на последующих уровнях управления движением путем внесения в него детализированною