Файл: Литература 25 Краткая история развития эргономики 27.doc
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 12.12.2023
Просмотров: 1032
Скачиваний: 1
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
СОДЕРЖАНИЕ
Эргономика и ее место в системе наук
Краткая история развития эргономики
Принципы эргономического анализа трудовой деятельности
5. Эргономические основы проектирования техники
Эргономические основы организации рабочего места
Оптимизация средств и систем отображения информации
Оптимизация рабочих движений и органов управления
Учет факторов среды при оптимизации системы «человек—машина»
предметного содержания. Причем объединение координированных двигательных структур на каждом уровне происходит с помощью соответствующих, зрительно выделенных свойств внешней среды. Необходимо установить, каким образом и на основании чего формируется новая для данного индивида деятельность, какова ее функциональная структура и каковы компоненты, ее составляющие.
Для ответа на поставленные вопросы в экспериментальной ситуации была использована инверсия как средство разрушения сложившегося навыка, при введении которой перцептивные и моторные поля, каждое в отдельности, по сути дела не претерпевали никаких изменений. Нарушалось лишь соответствие между движением манипулятора и перемещением пятна на экране, иначе говоря, в инверсии нарушалось привычное соотношение перцептивного и моторного полей, что, естественно, вызывало разрушение сложившегося в условиях совместимости сенсомоторного образа пространства, т. е. средства стали неадекватны цели. Использование инверсии дало возможность более полно проследить этапы построения нового сенсомоторного образа рабочего пространства [18, 19].
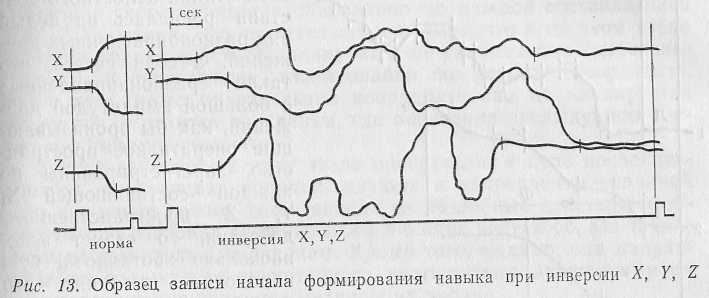
Остановимся подробнее на строении фазической стадии пространственного действия, которая при введении инверсии из пространственной, единой и целенаправленной превратилась в набор большого количества разнонаправленных движений, перемежающихся либо полными остановками, либо значительными замедлениями. Каждая такая остановка говорит о том, что, сделав небольшое движение, испытуемый контролирует себя и намечает (программирует) свой дальнейший путь (рис. 13).
По сути дела, в структуре фазы при переходе на один элемент матрицы можно насчитать 3—8 полных циклов, каждый из которых состоит из своих собственных стадий программирования, реализации и контролирования. Иначе говоря, фазическая стадия целостного действия распалась на целый ряд разнонаправленных движений, а если учесть, что такие разнонаправленные с большой амплитудой движения, как бы пронизывающие оперативное пространство, зарегистрированы по каждой составляющей X, Y, Z пространственного действия, то станет ясно, насколько хаотично и беспорядочно выглядит это действие, которое по сути дела нельзя назвать действием, 'поскольку оно не целенаправлено и раздроблено. Его можно представить себе как искусственно соединенные цепи отдельных операций, каждая из которых имеет определенные направления, скорость и точку приложения. Отсюда совершенно ясно, что исконная функция движения — исполнительная — трансформируется на этом этапе овладения действием в функцию познавательную, исследовательскую, ориентирующую.
Таким образом, на основе активных действий, прощупывающих рабочее пространство во всех направлениях, функция которых не исполнительная, а исследовательская, начинает строиться новый сенсомоторный образ пространства. На первом этапе построения сенсомоторного образа формируется достаточно обобщенный образ ситуации в целом (рис. 14, кривая 1), который можно назвать этапом построения образа конкретной ситуации.
Следующий этап характеризуется большой временной протяженностью, занимая примерно несколько десятков реализаций.
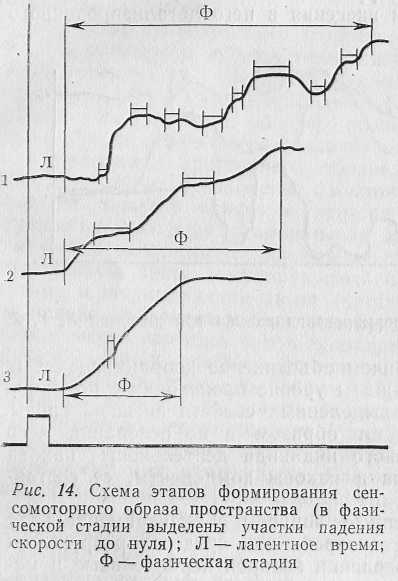
Этот этап характеризуется прощупывающими движениями, идущими в направлении цели (рис. 14, кривая 2). Здесь уже нет разнонаправленных движений большой амплитуды. Движение от одного элемента матрицы к другому как бы делится на ряд последовательных операций, в каждой из которых отчетливо выделяются программирующая, реализующая и контролирующая стадии. Испытуемый как бы квантует воображаемую траекторию на мелкие отрезки, где нарастание скорости осуществления действия сменяется полными остановками. И квантов тем больше, чем менее освоен образ пространства. Необходимо отметить, что увеличение и падение скорости идет изолированно по каждой составляющей X, Y, Z движения. Это свидетельствует о том, что и на этом этапе освоения образа действие планируется не симультанно (пространственно) , а сукцессивно, изолированно по каждой координате. Более того, даже по отдельной координате оно не планируется полностью, а делится на кванты, где окончание предыдущего служит началом следующего.
Единое действие на этом этапе превращено в цепь последовательных, пробующих операций, идущих в направлении заданной цели и в конце концов достигающих ее. Подобные действия необходимы для подгонки сложившегося в общих чертах образа к конкретным двигательным задачам. Кроме того, видимо, они направлены на нахождение масштабного соответствия движения руки и местоположения элемента матрицы на экране.
Таким образом, второй этап овладения сенсомоторным пространством можно назвать этапом построения образа реальных исполнительных действий.
Следующий этап освоения образа сенсомоторного пространства может быть отнесен к образной, ориентирующей части действия только на самых начальных этапах своего формирования (рис. 14, кривая 3). Он характеризуется целенаправленными целостными действиями, функция которых в основном направлена на слияние уже построенного образа ситуации с образом реальных исполнительных действий. Функция эта является достаточно сложной, она требует не механического соединения, а качественного проникновения одного в другое и на основе этого построения симультанного, единого для данных условий сенсомоторного образа рабочего пространства. На его основе затем будет совершенствоваться уже собственно-исполнительная часть действия. Наличие такого единого ориентирующего образа открывает на этом этапе возможность для формирования и совершенствования программы действия, первые попытки построения которой уже наметились на этапе построения образа исполнительных действий.
Как возможно соединение регулирующего и исполнительного компонентов, каждый из которых обладает большим числом степеней свободы? Каков процесс ограничения числа степеней свободы в обоих звеньях двигательного акта? Эти вопросы возникают применительно к анализу сформировавшегося двигательного акта,но еще большую остроту они приобретают по отношению к процессу его формирования, по отношению к процессу овладения человеком как традиционными, так и новыми орудиями трудовой деятельности.
Исследование характеристик когнитивных компонентов, а также изучение процесса их формирования чрезвычайно важны, так как именно они связывают ориентирующие и исполнительные компоненты деятельности.
Сравнительный качественный и количественный анализ характеристик движений руки и глаз, полученный на разных стадиях овладения двигательными навыками, позволил выявить общие закономерности изменения исследуемых параметров [21]. По мере овладения двигательным навыком сокращается как общее время выполнения действия, так и длительность каждой выделенной стадии целостного действия, а также продолжительность периода глазо-двигательной активности. Время программирующей стадии действия пропорционально величине и сложности маршрута движения. При прохождении любого маршрута латентное время движения руки при переходе со стартовой позиции на первую опорную точку маршрута в несколько раз превышает время латентной стадии перехода между любыми другими пунктами данного маршрута, а разница тем больше, чем сложнее маршрут движения. Общая последовательность включения фаз движения руки и глаз всегда одинакова: после подачи сигнала зарегистрирован латентный период движения руки и глаз, сменяющийся периодом глазодвигательной активности, который тем больше, чем сложнее маршрут движения, затем начинается движение руки.
Наблюдающиеся в исследовании движения глаз были разделены на два функционально-различных класса. К первому классу относятся ориентировочно-исследовательские движения глаз, зарегистрированные только в латентной стадии движения руки. По мере выработки двигательного навыка наблюдается их постепенная редукция. Функция ориентировочно-исследовательских движений глаз состоит в формировании перцептивно-моторного образа пространства и планировании движения по всему маршруту. Ко второму классу относятся афферентирующие движения глаз, которые разделяются на два типа: прослеживающие движения руки скачки и опережающие движения руки скачки на цель. По мере выработки навыка прослеживающие скачки трансформируются в опережающие скачки. Функция афферентирующих движений состоит в сличении, коррекции и установлении масштабного соответствия заданной программы с реальной задачей.
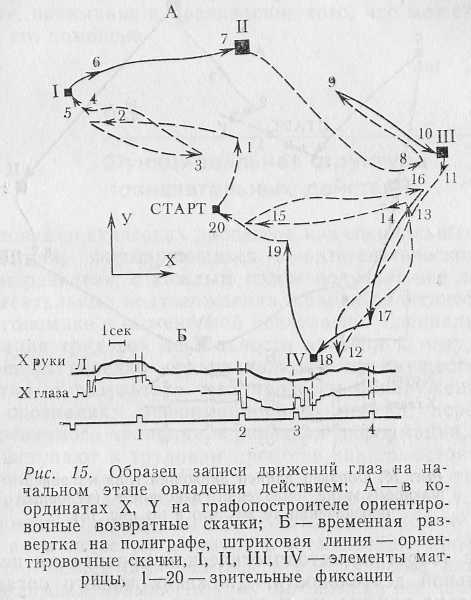
На начальных этапах обучения у испытуемых, не владеющих навыком управления манипулятором, во время латентной стадии движения руки наблюдается большое число движений глаз, пересекающих тестовую матрицу. Эти движения относятся по преимуществу к поступательно-возвратному типу. На стадии реализации у этих испытуемых наблюдаются афферентные прослеживающие движения глаз, сопровождающие исполнительное действие руки (рис. 15).
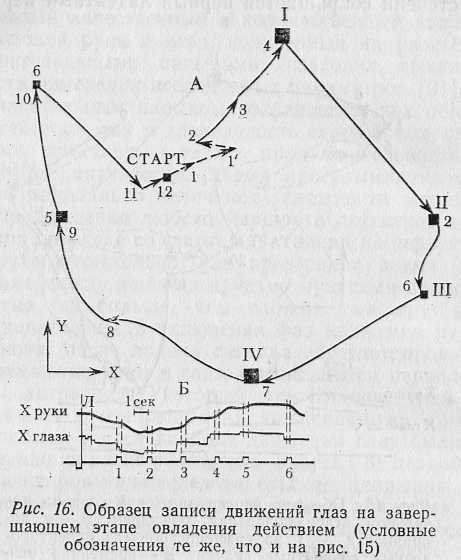
По мере выработки навыка постепенно сокращается число поступательно-возвратных движений глаз. Они сохраняются лишь во время латентной стадии первого перехода, т. е. до начала движеения руки. Этому соответствует и сокращение латентных периодов движения руки каждого перехода на элемент матрицы; в меньшей степени сокращается первый латентный период. Посту-
пательно-возвратные скачки глаз трансформируются в поступательные, непосредственно предшествующие исполнительному действию. В свою очередь, при хорошо сформированном навыке афферентные прослеживающие движения глаз трансформируются в опережающие исполнительное действие движения. После опережающего скачка глаз фиксирует цель до окончания исполнительного действия руки, т. е. до совмещения управляемого пятна с соответствующим элементом матрицы (рис. 16).
В процессе обучения формируется новый образ пространства и перестраиваются или формируются заново соответствующие экспериментальной ситуации сенсомоторные координации; послетого как построен сенсомоторный образ, начинает активно формироваться программа исследуемого действия. Одним из показателей сформированности образа пространства и пространственного действия являются типы движений глаз, их количество, скорость движения руки и характер сенсомоторного взаимодействия.
Из изложенного выше следует, что для понимания процесса превращения человеческой руки в «орудие орудий» необходима
правильная теоретико-методологическая ориентация исследований исполнительной деятельности. Движения живого органа должны быть не только поняты, но и раскрыты как своего рода морфологические объекты, функциональные органы. Функциональным органом «является всякое временное сочетание сил, способное осуществить определенное достижение» [58, с. 71]. Аналогия между движениями живого органа и анатомическими органами или тканями убедительно обосновывалась двумя главнейшими его свойствами: «... во-первых, живое движение реагирует, во-вторых, оно закономерно эволюционирует и инволюционирует» [7, с. 178]. Подобная трактовка живого движения, выделение в качестве объекта исследования его «биодинамической ткани» задает новую стратегию его научного изучения и практической организации. В частности, она означает и то, что движение, моторная схема, навык не могут быть усвоены — они должны быть построены субъектом. «Упражнение — это повторение без повторений» [7]. Известно, что по мере овладения человеком определенной системой движений, последняя стереотипизуется. Но далее «... эта система, бывшая раньше чем-то внешним, являвшаяся объектом усвоения, превращается постепенно в своеобразный орган индивидуальности, в средство выражения и реализации отношения человека к действительности» [28, с. 394]. Современную эргономику все в большей мере интересует строение этого «органа индивидуальности», понимание и предвидение того, что может быть реализовано с его помощью.