ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 04.02.2024
Просмотров: 525
Скачиваний: 1
СОДЕРЖАНИЕ
1.Основное уравнение движения электропривода.
2.Основные понятия об устойчивости электропривода.
3.Определение времени пуска и торможения электропривода
6.Расчет нагрузочных диаграмм и тахограмм.
8.Расчет и выбор мощности двигателей при длительном режиме работы
10.Механические характеристики двигателей постоянного тока последовательного возбуждения.
11.Способы торможения двигателей постоянного тока последовательного возбуждения.
12.Способы регулирования скорости двигателей постоянного тока независимого возбуждения.
13.Способы регулирования скорости двигателей постоянного тока независимого возбуждения.
15.Расчет тормозных сопротивлений двигателя постоянного тока независимого возбуждения (RДТ, RП).
17.Расчет пусковых сопротивлений в приводах с двигателями постоянного тока независимого возбуждения.
19.Каскадные схемы включения АД. Регулирование скорости асинхронных двигателей в системе АВК.
20.Расчет ступени противовключения для асинхронного двигателя.
21.Торможение асинхронного двигателя противовключением.
22.Регулирование скорости асинхронных двигателей.
23.Расчет пусковых сопротивлений асинхронных двигателей.
26.Регулирование скорости путем шунтирования обмотки якоря.
27.Расчет и выбор основного электрооборудования вентильного электропривода.
28.Механические характеристики вентильного электропривода.
30.Выпрямительный и инверторный режим работы тиристорного электропривода постоянного тока.
31.Управление выпрямленным напряжением в системе ТП-Д.
32.Регулирование скорости двигателей в системе ТП-Д. Расчет механических характеристик.
33.Регулирование выпрямленного напряжения в системе ТП-Д.
34.Энергетические характеристики системы ТП-Д
36.Регулирование скорости в системе ТПЧ-АД
37.Регулирование скорости в системе ТПЧ-СД.
38.Переходные процессы при пуске двигателя
39.Механические характеристики синхронных двигателей. Пуск в ход и торможение синхронных двигателей.
40.Особенности пуска синхронных двигателей. Разновидности схем пуска синхронных двигателей.
Оценим данный способ регулирования:
-
Регулирование скорости плавное; -
Диапазон регулирования (20…30):1; -
Значительные капитальные затраты Рсд>Рг>Рдв.
25.Динамическое торможение электродвигателей постоянного и переменного тока. Расчет механических характеристик.
Динамическое торможение происходит за счет того, что двигатель отключается от сети и приводится во вращение механизмом, имеющим запас кинетической энергии. Режим работы двигателя – генераторный.
-
Двигатели постоянного тока.
П
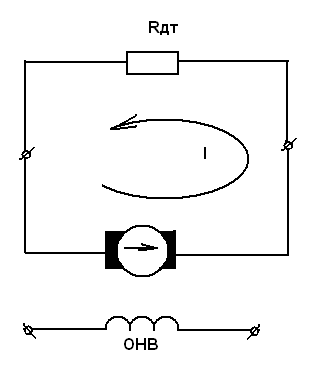 ри динамическом торможении двигатель отключается от сети и подключается к сопротивлению динамического торможения. Т.к.
ри динамическом торможении двигатель отключается от сети и подключается к сопротивлению динамического торможения. Т.к. 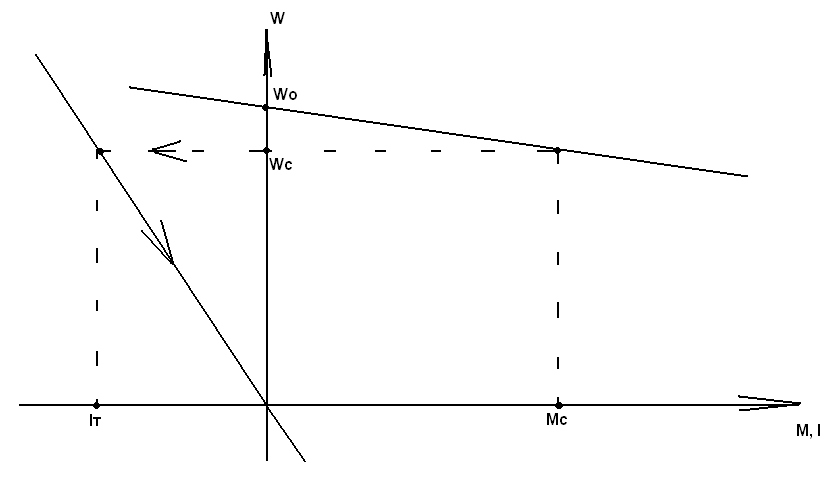
-
Асинхронный двигатель.
В этом режиме двигатель также отключается от сети 2 фазы подключаются к источнику постоянного напряжения U=40…60 В через сопротивление динамического торможения.
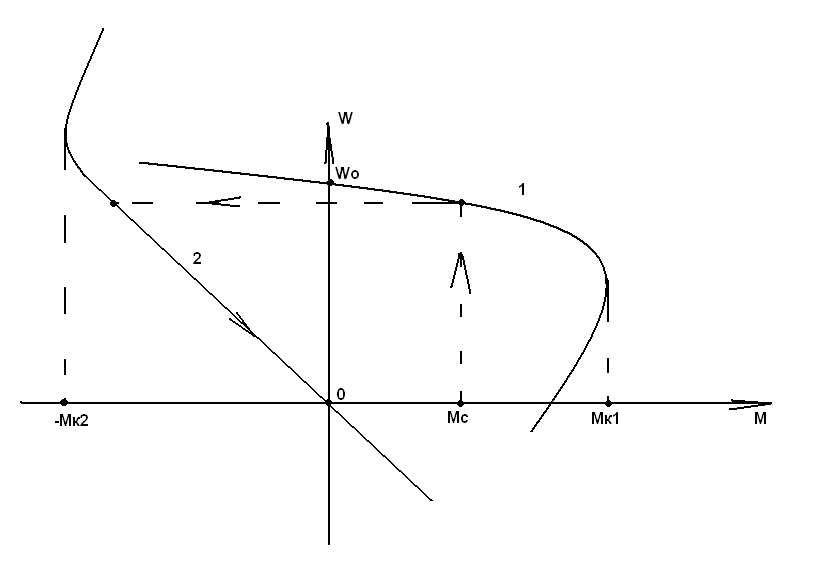
Источник постоянного напряжения создает в статоре неподвижное поле. Этому режиму соответствует характеристика 2.
Для ограничения тормозного момента вводится
Жесткость характеристики уменьшается за счет введения
26.Регулирование скорости путем шунтирования обмотки якоря.
Регулировочные резисторы включаются параллельно и последовательно с якорем. Схема изображена на рисунке 1.
Запишем уравнения Кирхгофа для цепи якоря:
Исключая из системы уравненей
Уравнения показывают, что скоростные и механические характеристики двигателя независимого возбуждения в схеме шунтирования якоря имеют вид прямых линий. Скорость идеального холостого хода уменьшается по сравнению с естественной характеристикой. Также снижается модуль жесткости механической характеристики.
Возможны 3 способа регулировки скорости: 1) изменение
1 способ: механическая характеристика изображена на рисунке 2, координаты точки пересечения:
2 способ: механическая характеристика изображена на рисунке 3, координаты точки пересечения:
.
3 способ: регулирование при условии

Рисунок 1
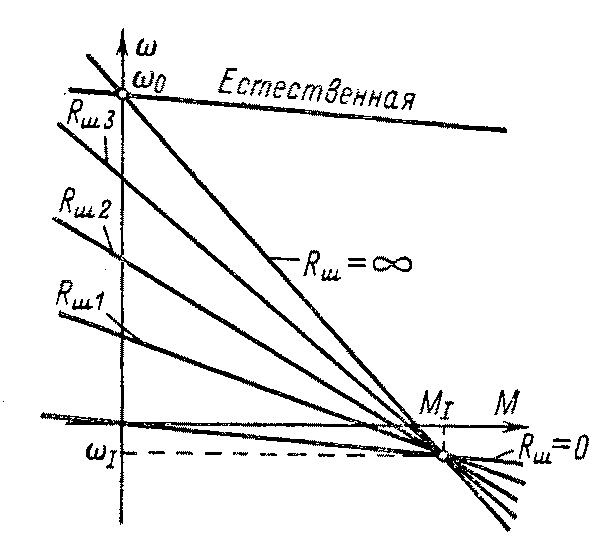
Рисунок 2
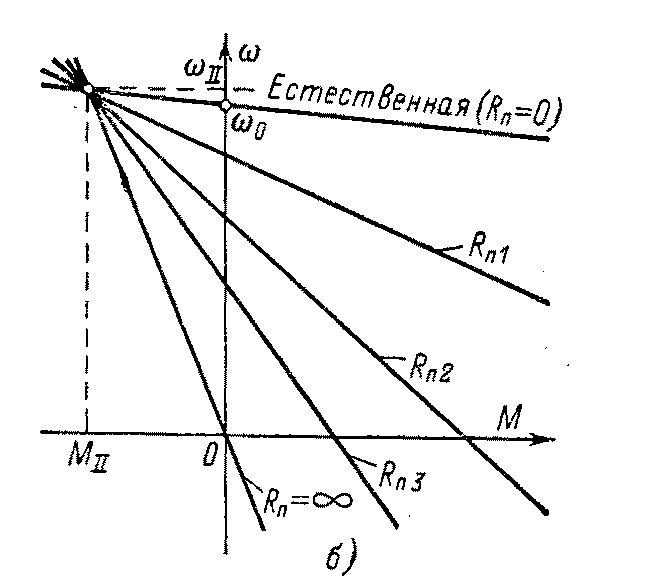
Рисунок 3
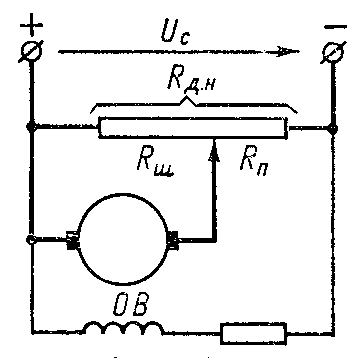
Рисунок 4
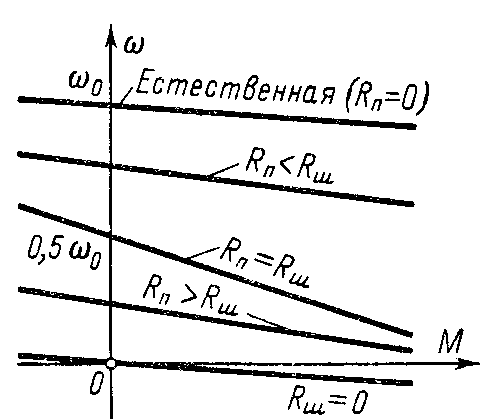
Рисунок 5
27.Расчет и выбор основного электрооборудования вентильного электропривода.
К основному электрооборудованию вентильного электропривода относят: силовой трансформатор, тиристорный преобразователь, сглаживающий дроссель.
Выбор силового трансформатора.
При расчете мощности и выборе трансформатора исходными данными являются следующие основные величины:
а) номинальное напряжение и ток преобразователя;
б) напряжение питающей сети;
в) допустимые колебания питающей сети;
г) число фаз первичной и вторичной обмоток трансформатора;
д) частота сети.
Расчетная мощность трансформатора определяется по формуле:
где:
– расчетные коэффициенты, из справочника;
Выбор тиристорного преобразователя.
При выборе ТП необходимо руководствоваться следующим:
Также следует учесть перегрузочную способность ТП:
Выбор сглаживающего дросселя.
Сглаживающий дроссель включается последовательно с якорем двигателя и его индуктивность выбирается из следующих условий:
а) сглаживание пульсаций выпрямленного тока, до требуемой величины, обеспечивающей удовлетворительную коммутацию двигателя;
б) обеспечение непрерывного выпрямленного тока при минимальной нагрузке на валу двигателя.
Индуктивность сглаживающего дросселя находится по уравнению:
где:
Если в результате вычисления значение