ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 04.02.2024
Просмотров: 529
Скачиваний: 1
СОДЕРЖАНИЕ
1.Основное уравнение движения электропривода.
2.Основные понятия об устойчивости электропривода.
3.Определение времени пуска и торможения электропривода
6.Расчет нагрузочных диаграмм и тахограмм.
8.Расчет и выбор мощности двигателей при длительном режиме работы
10.Механические характеристики двигателей постоянного тока последовательного возбуждения.
11.Способы торможения двигателей постоянного тока последовательного возбуждения.
12.Способы регулирования скорости двигателей постоянного тока независимого возбуждения.
13.Способы регулирования скорости двигателей постоянного тока независимого возбуждения.
15.Расчет тормозных сопротивлений двигателя постоянного тока независимого возбуждения (RДТ, RП).
17.Расчет пусковых сопротивлений в приводах с двигателями постоянного тока независимого возбуждения.
19.Каскадные схемы включения АД. Регулирование скорости асинхронных двигателей в системе АВК.
20.Расчет ступени противовключения для асинхронного двигателя.
21.Торможение асинхронного двигателя противовключением.
22.Регулирование скорости асинхронных двигателей.
23.Расчет пусковых сопротивлений асинхронных двигателей.
26.Регулирование скорости путем шунтирования обмотки якоря.
27.Расчет и выбор основного электрооборудования вентильного электропривода.
28.Механические характеристики вентильного электропривода.
30.Выпрямительный и инверторный режим работы тиристорного электропривода постоянного тока.
31.Управление выпрямленным напряжением в системе ТП-Д.
32.Регулирование скорости двигателей в системе ТП-Д. Расчет механических характеристик.
33.Регулирование выпрямленного напряжения в системе ТП-Д.
34.Энергетические характеристики системы ТП-Д
36.Регулирование скорости в системе ТПЧ-АД
37.Регулирование скорости в системе ТПЧ-СД.
38.Переходные процессы при пуске двигателя
39.Механические характеристики синхронных двигателей. Пуск в ход и торможение синхронных двигателей.
40.Особенности пуска синхронных двигателей. Разновидности схем пуска синхронных двигателей.
16.Расчет пусковых сопротивлений в приводах с двигателями постоянного тока последовательного возбуждения.
Схема пуска двигателя:
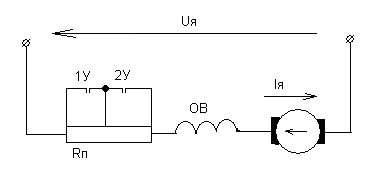
Пуск производится в три этапа:
-
RП (1У и 2У разомкнуты)
-
1У замкнут – RП1
-
2У замкнут – RП=0
Расчет пусковых сопротивлений (расчет механической характеристики) можно произвести аналитически (аналогично расчету пусковых сопротивлений двигателей постоянного тока независимого возбуждения).
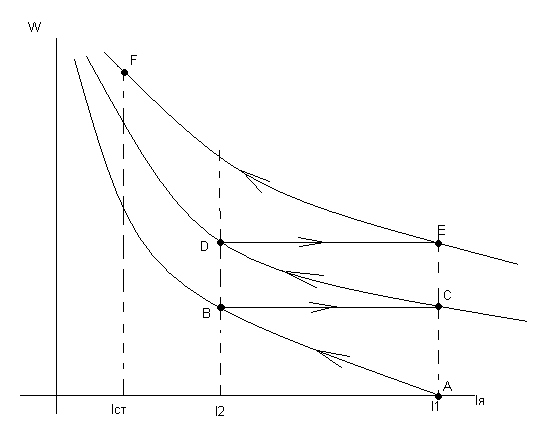
Также расчет можно произвести графоаналитическим методом.

Расстояние ОА соответствует внутреннему сопротивлению двигателя. Откладываем в том же масштабе отрезки Оа=R1=U/I1 и Og=R2=U/I2.
Соединяя точки а и е, а также g и f, получаем две прямые, характеризующие линейную зависимость между скоростью двигателя и сопротивлением его якорной цепи при неизменном токе якоря.
Для того чтобы определить число пусковых ступеней и их сопротивление, необходимо провести вертикальную черту через а до пересечения с gf в точке b. Затем провести через точку b линию, параллельную оси абсцисс, до точки с на линии ае. Аналогично провести линии cd иde.
Отрезок bс соответствует первой ступени реостата, а de – второй.
17.Расчет пусковых сопротивлений в приводах с двигателями постоянного тока независимого возбуждения.

В момент пуска w=0,
Рекомендуется ограничивать пусковой ток на уровне 2,5 от номинального. Для ограничения пускового тока в цепь якоря, на время пуска, вводится пусковое сопротивления.
Схема пуска двигателя:
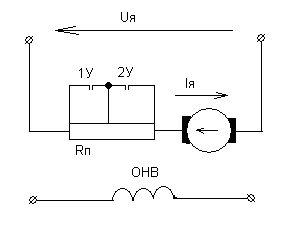
Пуск производится в три этапа:
-
RП (1У и 2У разомкнуты)
-
1У замкнут – RП1
-
2У замкнут – RП=0
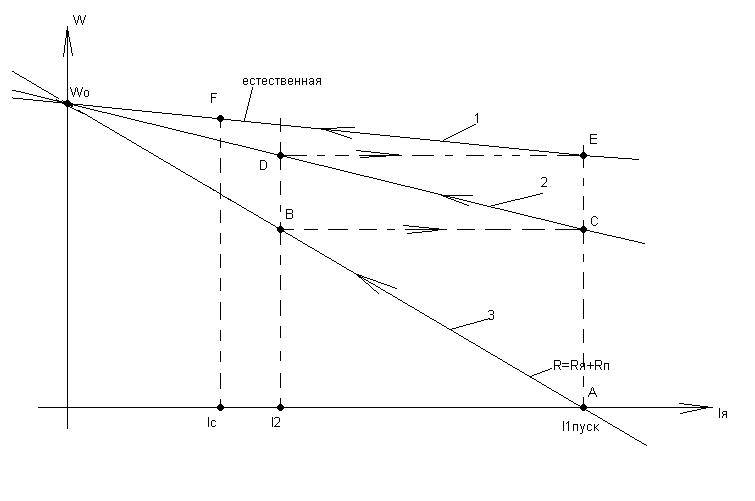
Комментарии к графику:
Двигатель начинает разгоняться из точки А. Пусковой ток в этом случае:
Количество ступеней RП определяется экономичностью и требованиями к плавности пуска (
Изменение скорости и тока во времени при реостатном пуске показано на рисунке:

18.Регулирование скорости двигателей постоянного тока независимого возбуждения при шунтировании обмотки якоря и включении последовательного сопротивления.
Для получения сравнительно жестких механических характеристик при малых скоростях применяют иногда шунтирование якоря резистором RШ при обязательном включении последовательного резистора RП.
Д
 ля приведенной схемы можно записать следующие соотношения:
ля приведенной схемы можно записать следующие соотношения:
Учитывая, что
а для механической, с учетом
В этих уравнениях коэффициент:
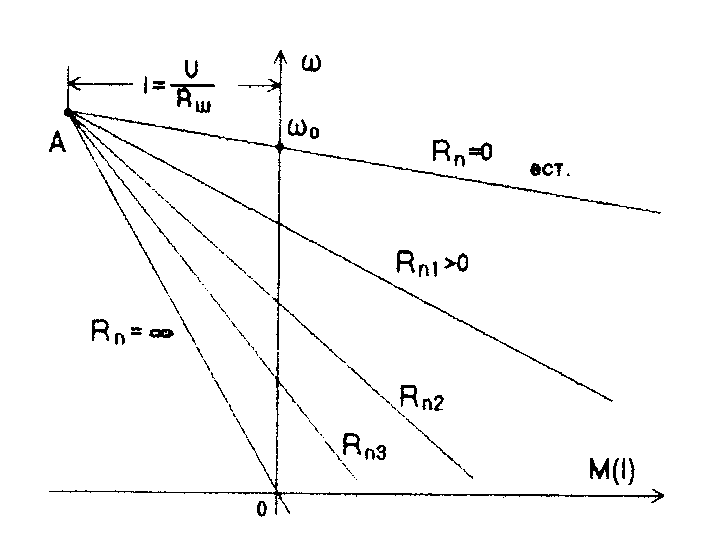
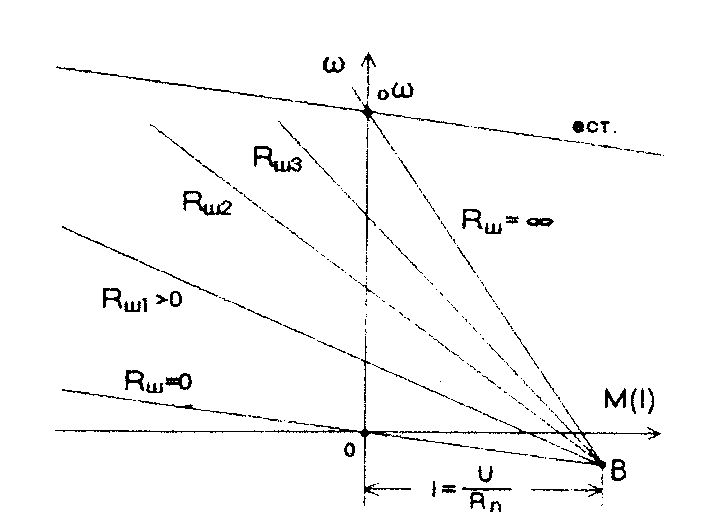
Проанализируем уравнения характеристик при изменении параметров RШ и RП:
-
RШ=0, RП=0….
Если RП=0, то это естественная характеристика. Если RП=, то это означает разрыв цепи. Якорь двигателя замкнут на RШ – это режим и характеристика динамического торможения. Семейство характеристик RП=var приведено на рисунке:
-
RП=const, RШ=var.
Если RШ=, то это разрыв в цепи шунтирования – это реостатная характеристика, соответствующая RП.
Если RШ=0, то это характеристика динамического торможения при закороченном якоре двигателя. Все характеристики при RШ=var сходятся в полюсе В. Семейство механических характеристик при RШ=var приведены на рисунке:
Шунтирование якоря расширяет диапазон регулирования скорости и стабилизирует регулировочные характеристики.

19.Каскадные схемы включения АД. Регулирование скорости асинхронных двигателей в системе АВК.
Регулирование скорости АД возможно в каскадных схемах включения.
Существуют следующие схемы:
-
Каскадные системы с одноякорным преобразователем; -
Вентильно-машинные каскады; -
Асинхронно-вентильный каскад.
Подробнее рассмотрим асинхронно-вентильный каскад (АВК).
А
 ВК состоит из АД, вентильного неуправляемого преобразователя В, инвертора И и трансформатора Тр. Эта схема относится к категории каскадов с промежуточным звеном постоянного тока. Вентильный преобразователь является неуправляемым и предназначен для выпрямления тока ротора, имеющего частоту скольжения.затем выпрямленный ток с помощью инвертора преобразуется в переменный ток частотой, равной частоте сети. Для сглаживания выпрямленного тока включен дроссель.
ВК состоит из АД, вентильного неуправляемого преобразователя В, инвертора И и трансформатора Тр. Эта схема относится к категории каскадов с промежуточным звеном постоянного тока. Вентильный преобразователь является неуправляемым и предназначен для выпрямления тока ротора, имеющего частоту скольжения.затем выпрямленный ток с помощью инвертора преобразуется в переменный ток частотой, равной частоте сети. Для сглаживания выпрямленного тока включен дроссель.Принцип действия каскада заключается в следующем. В цепь выпрямленного тока ротора вводится с помощью инвертора регулируемая добавочная ЭДС.
Выпрямленный ток определяется по формуле:
Если выпрямитель и инвертор включены по трехфазной мостовой схеме, то:
где