Файл: Г.М. Гринфельд лекции по курсу дискретные системы автоматического управления.doc
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 29.07.2024
Просмотров: 312
Скачиваний: 0
СОДЕРЖАНИЕ
1.1 Типы квантования непрерывных сигналов.
1.2. Решетчатые функции разностные уравнения.
1.3. Обобщенная структурная схема дискретной системы.
1.4. Простейший импульсный элемент. Формирующий элемент. Фиксатор.
2. Основы теории z-преобразования
2.1. Дискретное преобразование Лапласа. Z-преобразование.
2.2. Основные теоремы z-преобразования.
2.3. Передаточная функция разомкнутой дискретной системы.
2.4. Последовательное соединение звеньев в дискретных сау.
2.5. Передаточная функция замкнутой дискретной системы.
2.6. Обратное z-преобразование.
3. Анализ устойчивости и точности
3.1 Прямой метод оценки устойчивости.
3.2 Критерий устойчивости Шур-Кона.
3.3 Критерий устойчивости, использующий билинейное преобразование.
3.4. Абсолютно устойчивые системы.
3.5. Анализ точности дискретных систем.
4. Частотные характеристики дискретных систем
4.1. Теорема Котельникова-Шеннона.
4.2. Логарифмические частотные характеристики дискретных сау.
5. Определение реакции дискретной сау
5.1. Метод дробного квантования.
5.2. Метод модифицированного z-преобразования.
6. Системы автоматического управления
6.2. Передаточные функции цву, реализующего типовые законы управления.
7. Коррекция цифровых систем управления
7.1. Коррекция дискретных сау с помощью непрерывных регуляторов.
7.2. Коррекция сау с помощью цифровых регуляторов.
7.3. Физическая реализуемость цифровых регуляторов.
7.4. Реализация цифровых регуляторов импульсными фильтрами.
7.5. Реализация цифровых регуляторов на базе цву.
8. Методические указания и вариаты расчетно-графического задания
Следуя
рассмотренной выше методике, необходимо,
в первую очередь, найти решетчатую
функцию, соответствующую
![]() .
Выполнение этой операции сводится к
формальной замене непрерывного аргументаtв функции
.
Выполнение этой операции сводится к
формальной замене непрерывного аргументаtв функции![]() на дискретное время
на дискретное время![]() .
В рассматриваемом примере:
.
В рассматриваемом примере:
![]() .
.
Следующий этап – нахождение дискретного преобразования Лапласа приведенной решетчатой функции. С учетом (11) имеем:
![]() .
.
Применяя формулу суммы членов бесконечно убывающей прогрессии, получаем:
![]() .
.
Переход к Z– изображению осуществляем на основании (13):
![]() .
(14)
.
(14)
Пример 4.
Необходимо найти Z-преобразование
выходного сигнала ПИЭ, входной сигнал
которого – единичная ступенчатая
функция![]() .
Искомое изображение определим
непосредственно по формуле (12):
.
Искомое изображение определим
непосредственно по формуле (12):
![]() (15)
(15)
Аналогичный
результат может быть получен, если в
(14) перейти к пределу при
![]() .
.
Пример 5.
Необходимо найти Z-преобразование
функции![]() .
.
Соответствующая
решетчатая функция
![]() .
На основании (12) имеем:
.
На основании (12) имеем:
![]() .
.
Умножая обе
части этого выражения на
![]() ,
получим:
,
получим:
![]() .
.
Вычтем последнее выражение из предыдущего:
![]() .
.
Следовательно
![]() .
(16)
.
(16)
Рассмотрим
иной метод выполнения Z-преобразования,
который предполагает использование
непрерывногоL-изображения
сигнала![]() вместо решетчатой функции
вместо решетчатой функции![]() и ееD-изображения.
Для случая, когда изображение
и ееD-изображения.
Для случая, когда изображение![]() имеет
конечное число простых полюсов, оно
может быть представлено в виде:
имеет
конечное число простых полюсов, оно
может быть представлено в виде:
![]() ,
,
где p
– i-й простой полюс
изображения![]() ;k– порядок полинома
;k– порядок полинома![]()
![]()
Осуществим замену и преобразуем последнее выражение к виду:
![]()
(17)
Пример 6. Используя формулу (17), необходимо найти Z-изображение экспоненциального сигнала (см. пример 3) непосредственно по егоL- изображению.
Зная, что
![]()
,
![]()
можно записать:
![]() Тогда
Тогда
Как и следовало ожидать, полученный результат совпадает с (14).
Согласно
(12)
![]() определяется только величинами дискрет
решетчатой функции
определяется только величинами дискрет
решетчатой функции![]() и абсолютно не учитывает поведение
непрерывного сигнала
и абсолютно не учитывает поведение
непрерывного сигнала![]() между моментами квантования. Тем не
менее, для обозначения операцииZ-преобразования наряду
с
между моментами квантования. Тем не
менее, для обозначения операцииZ-преобразования наряду
с![]() в дальнейшем используются выражения
вида
в дальнейшем используются выражения
вида![]() или
или![]() .
Эта формальная запись означает только
то, чтоZ-преобразование
осуществляется по решетчатой функции,
полученной путем квантования непрерывного
сигнала
.
Эта формальная запись означает только
то, чтоZ-преобразование
осуществляется по решетчатой функции,
полученной путем квантования непрерывного
сигнала![]() ,
обладающегоL-изображением
,
обладающегоL-изображением![]() .
.
Для наиболее
часто встречающихся функций
![]() существуют таблицыZ-изображений,
достаточно подробные таблицы приведены
в [2,11].
существуют таблицыZ-изображений,
достаточно подробные таблицы приведены
в [2,11].
2.2. Основные теоремы z-преобразования.
Математический аппарат Z-преобразования является основой теории дискретных САУ. Ниже приведены формулировки основных теоремZ-преобразования и примеры их применения.
Теорема о линейности преобразования:
![]() Если константы, то
Если константы, то
![]()
Т
 еорема
о смещении во временной области:
еорема
о смещении во временной области:
Если , а k-натуральное число, то
![]()

.
Теорема об умножении оригинала на экспоненту:
Е![]() сли
сли![]() константа,
то
константа,
то
.
Теорема о начальном значении:
Е![]() сли и
существует предел
сли и
существует предел
![]() ,
то
,
то
![]() .
.
Теорема о конечном значении:
![]() Если и
если функция
Если и
если функция
![]() не имеет полюсов на окружности единичного
радиуса
не имеет полюсов на окружности единичного
радиуса
![]() и вне ее на комплексной плоскостиZ,
то
и вне ее на комплексной плоскостиZ,
то
![]() .
.
Пример 7.
Необходимо найти Z-изображение
функции![]() .
.
На основании теоремы линейности можно записать:
![]()

Пример 8.
Необходимо найти Z-изображение
функции![]() .
.
Используя
теорему об умножении на экспоненту
применительно к (16), можно записать
![]()
 .
.
2.3. Передаточная функция разомкнутой дискретной системы.
По аналогии
с непрерывными системами введем в
рассмотрение передаточную функцию
дискретной системы
![]() ,
как отношениеZ- изображений
выходного и входного сигналов при
нулевых начальных условиях:
,
как отношениеZ- изображений
выходного и входного сигналов при
нулевых начальных условиях:
![]() . (18)
. (18)
В разомкнутой
дискретной САУ (рис. 13) сигналы
![]() и
и![]() - непрерывные функции времени, и формула
(19) определяет связь не между ними, а
между соответствующими решетчатыми
функциями
- непрерывные функции времени, и формула
(19) определяет связь не между ними, а
между соответствующими решетчатыми
функциями![]() и
и![]() .
.
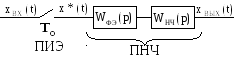
Рис.13. К определению дискретной
передаточной функции
Как было
указано выше, рассматриваемые выше в
данном курсе импульсные САУ с АИМ и
![]() ,
являются линейными. В линейных системах,
как в непрерывных, так и в дискретных,
передаточная функция не зависит от вида
входного сигнала. Поэтому с целью
упрощения вывода формул для
,
являются линейными. В линейных системах,
как в непрерывных, так и в дискретных,
передаточная функция не зависит от вида
входного сигнала. Поэтому с целью
упрощения вывода формул для![]() в качестве входного сигнала используется
единичный одиночный импульс, который
описывается зависимостью:
в качестве входного сигнала используется
единичный одиночный импульс, который
описывается зависимостью:
Z-изображение
такого сигнала равно единице. На выходе
квантователя ему будет соответствовать
немодулированная![]() -
функция. Следовательно, реакция САУ на
единичный одиночный импульс
-
функция. Следовательно, реакция САУ на
единичный одиночный импульс
![]() является функция веса ПНЧ, а ееZ-изображение совпадает
с передаточной функцией
является функция веса ПНЧ, а ееZ-изображение совпадает
с передаточной функцией![]() :
: