Файл: Г.М. Гринфельд лекции по курсу дискретные системы автоматического управления.doc
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 29.07.2024
Просмотров: 298
Скачиваний: 0
СОДЕРЖАНИЕ
1.1 Типы квантования непрерывных сигналов.
1.2. Решетчатые функции разностные уравнения.
1.3. Обобщенная структурная схема дискретной системы.
1.4. Простейший импульсный элемент. Формирующий элемент. Фиксатор.
2. Основы теории z-преобразования
2.1. Дискретное преобразование Лапласа. Z-преобразование.
2.2. Основные теоремы z-преобразования.
2.3. Передаточная функция разомкнутой дискретной системы.
2.4. Последовательное соединение звеньев в дискретных сау.
2.5. Передаточная функция замкнутой дискретной системы.
2.6. Обратное z-преобразование.
3. Анализ устойчивости и точности
3.1 Прямой метод оценки устойчивости.
3.2 Критерий устойчивости Шур-Кона.
3.3 Критерий устойчивости, использующий билинейное преобразование.
3.4. Абсолютно устойчивые системы.
3.5. Анализ точности дискретных систем.
4. Частотные характеристики дискретных систем
4.1. Теорема Котельникова-Шеннона.
4.2. Логарифмические частотные характеристики дискретных сау.
5. Определение реакции дискретной сау
5.1. Метод дробного квантования.
5.2. Метод модифицированного z-преобразования.
6. Системы автоматического управления
6.2. Передаточные функции цву, реализующего типовые законы управления.
7. Коррекция цифровых систем управления
7.1. Коррекция дискретных сау с помощью непрерывных регуляторов.
7.2. Коррекция сау с помощью цифровых регуляторов.
7.3. Физическая реализуемость цифровых регуляторов.
7.4. Реализация цифровых регуляторов импульсными фильтрами.
7.5. Реализация цифровых регуляторов на базе цву.
8. Методические указания и вариаты расчетно-графического задания
для вычисления текущего значения
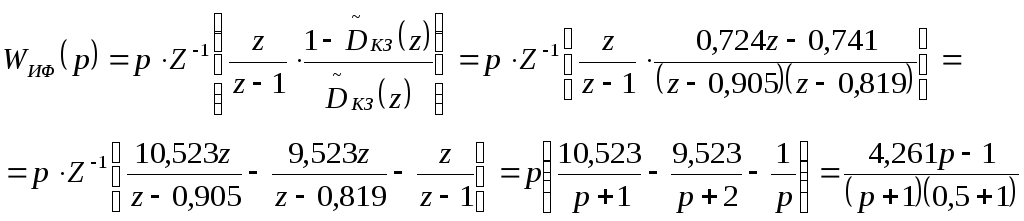
![]() имеют вид:
имеют вид:
![]()
где
![]()
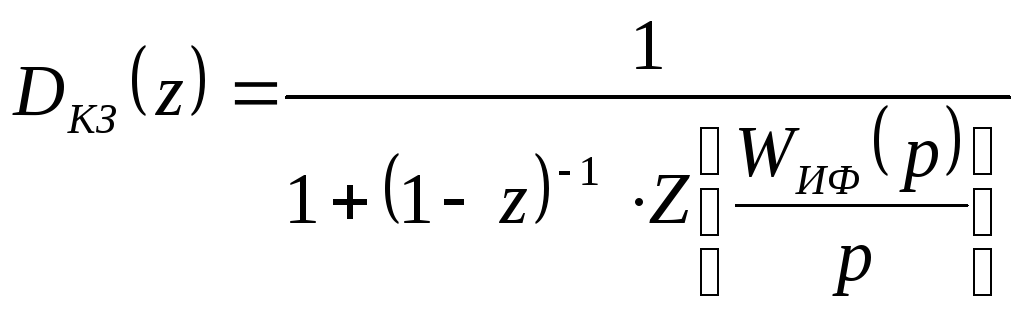
Другой способ реализации дискретного корректирующего звена предполагает использование импульсного фильтра.
Импульсный фильтр (ИФ) – это электрический четырехполюсник, включенный между двумя устройствами выборки и хранения дискретных значений сигналов.
На рис. 65 приведена структура
последовательного ИФ, для которого
справедлива следующая зависимость
между
![]() и
и![]() :
:
![]() (78)
(78)
где
![]() -
передаточная функция четырехполюсника.
-
передаточная функция четырехполюсника.
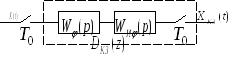
Рис. 65. Структура последовательного импульсного фильтра.
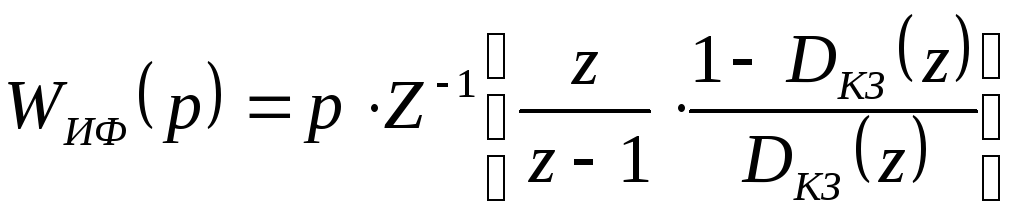
Если выражение для
![]() определено, искомая передаточная функция
определено, искомая передаточная функция![]() находится по методике, совпадающей с
той, что была использована при определении
последовательного непрерывного
корректирующего звена. На основании
(78) можно записать:
находится по методике, совпадающей с
той, что была использована при определении
последовательного непрерывного
корректирующего звена. На основании
(78) можно записать:
![]()
Передаточная функция
![]() может быть реализована последовательным
ИФ на базе
может быть реализована последовательным
ИФ на базе![]() -
четырехполюсника, если:
-
четырехполюсника, если:
а) порядок знаменателя
![]() не меньше порядка числителя;
не меньше порядка числителя;
б) значения нулей
![]() являются произвольными, а полюса должны
быть простыми, положительными и меньшими
единицы.
являются произвольными, а полюса должны
быть простыми, положительными и меньшими
единицы.
При включении четырехполюсника в цепь обратной связи (рис. 66) передаточная функция дискретного корректирующего звена определяется
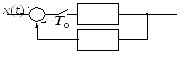
Рис. 66. Реализация импульсного фильтра с помощью корректирующего
четырехполюсника в цепи обратной связи.
следующим выражением:
преобразуя которое, получаем искомую передаточную функцию четырехполюсника:
 (79)
(79)
Передаточная функция
![]() может быть реализована ИФ с
может быть реализована ИФ с![]() -четырехполюсником
в цепи обратной связи, если:
-четырехполюсником
в цепи обратной связи, если:
а)
![]() имеет одинаковое число полюсов и нулей;
имеет одинаковое число полюсов и нулей;
б) значения полюсов
![]() являются произвольными, а нули должны
быть простыми, положительными и меньшими
единицы.
являются произвольными, а нули должны
быть простыми, положительными и меньшими
единицы.
Для рассматриваемой системы
![]() описывается выражением (71). Учитывая
ограничения, накладываемые на передаточную
функцию корректирующего звена, его
реализация возможна в виде ИФ с
описывается выражением (71). Учитывая
ограничения, накладываемые на передаточную
функцию корректирующего звена, его
реализация возможна в виде ИФ с![]() -
схемой в цепи обратной связи. Определение
-
схемой в цепи обратной связи. Определение![]() существенно упрощается, если
существенно упрощается, если![]() представить в виде:
представить в виде:
![]()
где
![]()
![]()
При этом корректирующее звено представляет
собой последовательно соединенные ИФ
и пропорциональное звено с коэффициентом
![]() .
.
Тогда в соответствии с (79) имеем:
Схемное решение, соответствующее
полученной передаточной функции
![]() ,
приведено на рис. 67 .
,
приведено на рис. 67 .
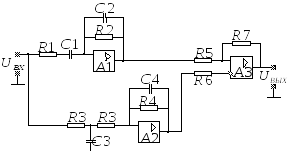
Рис. 67. Реализация корректирующего четырехполюсника
в цепи обратной связи импульсного фильтра.
Дискретные САУ содержат в своем составе как дискретные, так и непрерывные звенья. Моделирование последних с использованием программы PSMне вызывает затруднений. К числу дискретных звеньев системы относятся импульсные элементы (ИЭ) и дискретное корректирующее звено. ИЭ состоит из последовательно соединенных простейшего импульсного элемента (квантователя) и формирующего элемента. Выходной сигнал первого из них представляет собой последовательность модулированных
 -
функций. Поэтому принципиально возможны
только упрощенное моделирование
квантователя, предполагающее выделение
дискрет из его непрерывного входного
сигнала, и модуляция ими импульсов
большой амплитуды и малой длительности.
Гораздо проще осуществить моделирование
ИЭ, содержащего фиксатор в качестве
формирующего элемента. Выходной сигнал
такого ИЭ изменяется только в моменты
квантования, а внутри интервалов
квантования остается постоянным,
совпадая по величине с очередной
дискретой входного сигнала. Существующая
версияPSMсодержит такое
звено – это «Устройство квантования
по времени».
-
функций. Поэтому принципиально возможны
только упрощенное моделирование
квантователя, предполагающее выделение
дискрет из его непрерывного входного
сигнала, и модуляция ими импульсов
большой амплитуды и малой длительности.
Гораздо проще осуществить моделирование
ИЭ, содержащего фиксатор в качестве
формирующего элемента. Выходной сигнал
такого ИЭ изменяется только в моменты
квантования, а внутри интервалов
квантования остается постоянным,
совпадая по величине с очередной
дискретой входного сигнала. Существующая
версияPSMсодержит такое
звено – это «Устройство квантования
по времени».
При моделировании САУ, содержащей цифровой регулятор, элементы задержки, входящие в его структуру, моделируются звеньями чистого (транспортного) запаздывания, у которых время запаздывания полагается равным интервалу квантования.
Результаты моделирования приведены на рис. 68 – 71.
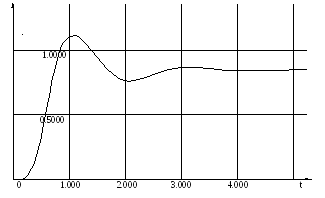
Рис. 68. Переходная функция нескорректированной дискретной САУ
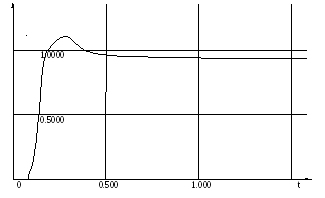
Рис. 69. Переходная функция дискретной САУ с аналоговым корректирующим звеном
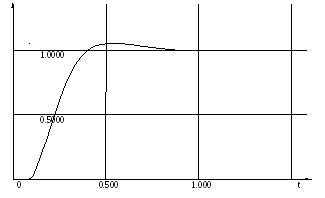
Рис. 70. Переходная функция дискретной САУ с цифровым регулятором
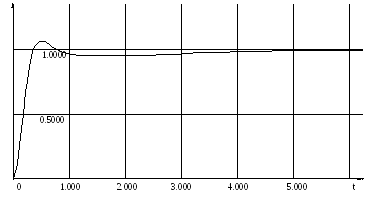
Рис. 71. Переходная функция дискретной САУ с корректирующим импульсным фильтром
ЗАКЛЮЧЕНИЕ
В настоящем курсе рассмотрены основные разделы математического аппарата, используемого для теоретического описания автоматических систем с цифровым вычислительным устройством в контуре управления. Вопросы, связанные с разработкой архитектуры таких систем, организацией процессорных элементов и обеспечением их взаимодействия, излагаются студентам в курсе “Системы управления электроприводами”, базирующемся на теоретических положениях, изложенных в настоящем пособии.
БИБЛИОГРАФИЧЕСКИЙ СПИСОК
1. Воронов А.А. Основы теории автоматического управления: Особые линейные и нелинейные системы. — 2-е изд., перераб. — М.: Энергия. 1981.—304 с.
2. Иващенко Н.Н. Автоматическое регулирование. Теория и элементы систем: Учебник дня вузов–М.: Машиностроение, 1978.— 736 с.
3. Цыпкин ЯЗ. Основы теории автоматических систем. — М.: Наука, 1977. -- ^0 г.
4. Теория автоматического управления /Под. ред. А.С. Шаталова. — М.: Высшая школа, 1977. -448 с.
5. Солодовников В.В. и пр. Основы теории и элементы систем автоматического регулирования: Учеб. пособие для вузов /В.В.Солодовников. В.Н.Плоткиков, А.В.Яковлев. - М.: Машиностроение, 1985. – 536 с.
6. Теория автоматического управления. Учебник для вузов / Под рец. А.В.Нетушила. — М.: Высшая школа, 1976. – 400 с.
7. Бессекерский В.А.. Попов Е.Л. Теория систем автоматического регулирования. — М.: Наука, 1972. — 992 с.
И. Сборник задач по теории автоматического регулирования и управления /Под ред- В. А. Бессекерского. -- 5-е изд., перераб. — М.: Каука,1978.—512с.
9. Задачник по теории автоматического управления / Под ред. А.С.Шаталова. — 2-е изд., перераб. — М.: Энергия, 1979. — 545 с.
10. Бессекерский В.А., Изранцев В.В. Системы автоматического управления с микроЭВМ.— М.: Наука, 1987. — 320 с.
11. Юлиус Т. Ту. Цифровые и импульсные системы автоматического управления Пер. с англ. - - М.: Машиностроение, 1964. — 703 с.
12. Куо В. Теория и проектирование цифровых систем управления: Пер с англ.– М.: Машиностроение, 1986.—448 с.
13. Остреём К., Виттенмарк Б. Системы управления с ЭВМ: Пер. с англ. – М.: Мир. 1987. – 480 с.
14. Изерман Р. Цифровые системы управления: Пер. с англ, — М.: Мир, 1984.-541 с.