Файл: Г.М. Гринфельд лекции по курсу дискретные системы автоматического управления.doc
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 29.07.2024
Просмотров: 295
Скачиваний: 0
СОДЕРЖАНИЕ
1.1 Типы квантования непрерывных сигналов.
1.2. Решетчатые функции разностные уравнения.
1.3. Обобщенная структурная схема дискретной системы.
1.4. Простейший импульсный элемент. Формирующий элемент. Фиксатор.
2. Основы теории z-преобразования
2.1. Дискретное преобразование Лапласа. Z-преобразование.
2.2. Основные теоремы z-преобразования.
2.3. Передаточная функция разомкнутой дискретной системы.
2.4. Последовательное соединение звеньев в дискретных сау.
2.5. Передаточная функция замкнутой дискретной системы.
2.6. Обратное z-преобразование.
3. Анализ устойчивости и точности
3.1 Прямой метод оценки устойчивости.
3.2 Критерий устойчивости Шур-Кона.
3.3 Критерий устойчивости, использующий билинейное преобразование.
3.4. Абсолютно устойчивые системы.
3.5. Анализ точности дискретных систем.
4. Частотные характеристики дискретных систем
4.1. Теорема Котельникова-Шеннона.
4.2. Логарифмические частотные характеристики дискретных сау.
5. Определение реакции дискретной сау
5.1. Метод дробного квантования.
5.2. Метод модифицированного z-преобразования.
6. Системы автоматического управления
6.2. Передаточные функции цву, реализующего типовые законы управления.
7. Коррекция цифровых систем управления
7.1. Коррекция дискретных сау с помощью непрерывных регуляторов.
7.2. Коррекция сау с помощью цифровых регуляторов.
7.3. Физическая реализуемость цифровых регуляторов.
7.4. Реализация цифровых регуляторов импульсными фильтрами.
7.5. Реализация цифровых регуляторов на базе цву.
8. Методические указания и вариаты расчетно-графического задания
то степень устойчивости такой системы может быть оценена по расстоянию от единичной окружности, проведенной из начала координат плоскости z, до ближайшего к нейz-корня характеристического уравнения
![]()
При использовании для описания дискретной САУ комплексной переменной рстепень устойчивости оценивается по расстоянию от мнимой осир-плоскости до ближайшего к нейр-корня характеристического уравнения:
![]()
Если первые
kмладших коэффициентов
характеристического уравнения равны
нулю, т.е.![]() ,
оно сводится к виду
,
оно сводится к виду
![]()
Это уравнение
имеет корень
![]() кратностиk, при этом
степень устойчивости оказывается
бесконечно большой.
кратностиk, при этом
степень устойчивости оказывается
бесконечно большой.
Определим решетчатую функцию на выходе такой абсолютно устойчивой дискретной системыпри подаче на вход единичного ступенчатого сигнала. Для системы второго порядкаZ-изображение выходного сигнала равно:

Значения
решетчатой функции
![]() определим путем разложения
определим путем разложения![]() в ряд Лорана:
в ряд Лорана:

Имеем:
![]() ;
;![]() ;
при
;
при![]()
![]() ,
т.е. выходной сигнал системы, достигнув
установившегося значения за два периода
квантования, в дальнейшем остается
неизменным.
,
т.е. выходной сигнал системы, достигнув
установившегося значения за два периода
квантования, в дальнейшем остается
неизменным.
В общем
случае для абсолютно устойчивой системы
k-го порядка значения
решетчатой переходной функции при![]()
 ,
а при
,
а при![]()
т.е. по истечении
kтактов выходной
сигнал системы становится постоянным.
Следовательно, переходный процесс,
вызванный единичным ступенчатым
воздействием, заканчивается за конечное
время![]() .
Необходимо учитывать, что между моментами
квантования непрерывный сигнал
.
Необходимо учитывать, что между моментами
квантования непрерывный сигнал![]() может содержать пульсации, но при малой
величине периода квантования
может содержать пульсации, но при малой
величине периода квантования![]() их амплитуда обычно незначительна.
их амплитуда обычно незначительна.
Пример
21. Необходимо определить значения
коэффициентов
![]() и
и![]() ,
при которых достигается конечная
длительность процесса регулирования
в дискретной САУ (рис. 24).
,
при которых достигается конечная
длительность процесса регулирования
в дискретной САУ (рис. 24).
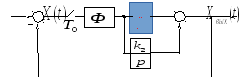
Рис.24. Структура дискретной САУ к примеру 21
Дискретная передаточная функция разомкнутой системы:
![]() .
.
Характеристическое уравнение замкнутой САУ:
![]()
или
![]()
Следовательно, условие конечной длительности переходного процесса:
Решение
приведенное системы уравнений:
![]() ;
;![]() .
.
Время переходного
процесса:
![]() .
.
3.5. Анализ точности дискретных систем.
Как и для
непрерывных систем точность дискретных
САУ характеризуется величинами
статических и динамических ошибок. В
ряде случаев значение статической
ошибки замкнутой устойчивой системы
![]() может быть определено с помощью теоремы
о конечном значении:
может быть определено с помощью теоремы
о конечном значении:
![]()
где
![]() -
изображение сигнала ошибки.
-
изображение сигнала ошибки.
Для
вычисления ошибки при меняющемся
воздействии (точнее, когда
![]() удается с приемлемой точностью
аппроксимировать суммой конечного
числа слагаемых вида
удается с приемлемой точностью
аппроксимировать суммой конечного
числа слагаемых вида![]() )
используюткоэффициенты ошибки.
При выполнении указанного условия
ошибку системы, начиная с некоторого
момента, можно представить в виде ряда:
)
используюткоэффициенты ошибки.
При выполнении указанного условия
ошибку системы, начиная с некоторого
момента, можно представить в виде ряда:
 , (33)
, (33)
где
![]() -
коэффициенты ошибки по положению,
скорости и ускорению.
-
коэффициенты ошибки по положению,
скорости и ускорению.
Коэффициенты ошибки рассчитываются по формулам
![]()
![]()
![]() (34)
(34)
Пример 22. Необходимо определить коэффициенты ошибки для дискретной САУ, структура которой приведена на рис. 25.
Передаточная функция разомкнутой системы:
![]()
Передаточная функция по ошибке:
![]()
Тогда
согласно (34) коэффициенты ошибки: по
положению
![]() ;
по скорости
;
по скорости![]() ;
по ускорению
;
по ускорению![]() .
.
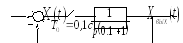
Рис.25. Структура дискретной САУ к примеру 21
Следовательно,
разложение
![]() в ряд (33) имеет вид:
в ряд (33) имеет вид:

Очевидно, что при ступенчатом сигнале на входе системы установившаяся ошибка в дискретные моменты времени равна нулю, а при линейно-нарастающем входном воздействии величина установившейся ошибки будет равна 0,1.
4. Частотные характеристики дискретных систем
4.1. Теорема Котельникова-Шеннона.
Если
немодулированную последовательность
![]() -
функций представить в виде комплексного
ряда Фурье:
-
функций представить в виде комплексного
ряда Фурье:
![]() ,
,
то выражение (5) для сигнала на выходе квантователя можно переписать следующим образом:
![]()
где
![]() -
частота квантования.
-
частота квантования.
Преобразования Лапласа последнего выражения:
![]()
Используя теорему L- преобразования об умножении оригинала на экспоненту, получим:
![]()
Приведенные
выражения означают, что L-
изображения выходного сигнала квантователя
являются периодическими функциями с
периодом, равным![]() ,
т.е.
,
т.е.
![]() ,
,
где k- целое число.
Осуществив
в (35) замену pна![]() ,
перейдем к спектральной характеристике
сигнала на выходе ПИЭ:
,
перейдем к спектральной характеристике
сигнала на выходе ПИЭ:
![]() .
.
Очевидно, что
спектр этого сигнала пропорционален
сумме смещенных (транспортированных)
спектров непрерывного сигнала
![]() на
входе квантователя. Кроме того, он
периодичен по частоте с периодом, равным
частоте квантования
на
входе квантователя. Кроме того, он
периодичен по частоте с периодом, равным
частоте квантования![]() ,
и поэтому полностью определен в полосе
частот
,
и поэтому полностью определен в полосе
частот![]() ,
которая называетсяосновной полосой.
,
которая называетсяосновной полосой.
С учетом
того, что спектр любого сигнала является
четной функцией, симметричной относительно
частоты
![]() ,
он может быть полностью описан в частотном
диапазоне
,
он может быть полностью описан в частотном
диапазоне![]() .
.
Таким образом, в спектре квантованного сигнала по сравнению со спектром соответствующего непрерывного сигнала присутствуют дополнительные высокочастотные составляющие. Как известно, существует однозначная зависимость между спектральной характеристикой сигнала и описывающей его функцией времени. Любое искажение спектра сигнала соответствует потере информации, которая в нем заключена. Ниже сформулированы условия, при которых введение в систему импульсного элемента не приводит к такой потере.
Если
спектр
![]() не ограничен по частоте (не являетсяфинитным) (рис. 26), то искажений
избежать не удается из-за наложения
высокочастотных “хвостов” смещенных
спектров (рис. 27).
не ограничен по частоте (не являетсяфинитным) (рис. 26), то искажений
избежать не удается из-за наложения
высокочастотных “хвостов” смещенных
спектров (рис. 27).
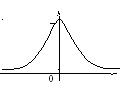
Рис.26. Нефинитный спектр входного сигнала квантователя
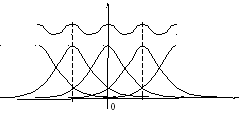
Рис.27. Спектр выходного сигнала
Рассмотрим
случай, когда спектр
![]() ограничен по частоте (финитен), т.е.
ограничен по частоте (финитен), т.е.![]() ,
если
,
если![]() ,
где
,
где![]() - частота среза (рис. 28). Если
- частота среза (рис. 28). Если![]() ,
также происходит наложение транспортированных
спектров, в результате чего в основной
полосе частот наблюдается различие
между спектральными характеристиками
,
также происходит наложение транспортированных
спектров, в результате чего в основной
полосе частот наблюдается различие
между спектральными характеристиками![]() и
и![]() (рис. 29). Когда
(рис. 29). Когда![]() ,
наложение смещенных спектров не
происходит (рис. 30), и в основной полосе
частот
,
наложение смещенных спектров не
происходит (рис. 30), и в основной полосе
частот![]() и
и![]() ,
совпадая по форме, различаются лишь
масштабом.
,
совпадая по форме, различаются лишь
масштабом.