Файл: Г.М. Гринфельд лекции по курсу дискретные системы автоматического управления.doc
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 29.07.2024
Просмотров: 303
Скачиваний: 0
СОДЕРЖАНИЕ
1.1 Типы квантования непрерывных сигналов.
1.2. Решетчатые функции разностные уравнения.
1.3. Обобщенная структурная схема дискретной системы.
1.4. Простейший импульсный элемент. Формирующий элемент. Фиксатор.
2. Основы теории z-преобразования
2.1. Дискретное преобразование Лапласа. Z-преобразование.
2.2. Основные теоремы z-преобразования.
2.3. Передаточная функция разомкнутой дискретной системы.
2.4. Последовательное соединение звеньев в дискретных сау.
2.5. Передаточная функция замкнутой дискретной системы.
2.6. Обратное z-преобразование.
3. Анализ устойчивости и точности
3.1 Прямой метод оценки устойчивости.
3.2 Критерий устойчивости Шур-Кона.
3.3 Критерий устойчивости, использующий билинейное преобразование.
3.4. Абсолютно устойчивые системы.
3.5. Анализ точности дискретных систем.
4. Частотные характеристики дискретных систем
4.1. Теорема Котельникова-Шеннона.
4.2. Логарифмические частотные характеристики дискретных сау.
5. Определение реакции дискретной сау
5.1. Метод дробного квантования.
5.2. Метод модифицированного z-преобразования.
6. Системы автоматического управления
6.2. Передаточные функции цву, реализующего типовые законы управления.
7. Коррекция цифровых систем управления
7.1. Коррекция дискретных сау с помощью непрерывных регуляторов.
7.2. Коррекция сау с помощью цифровых регуляторов.
7.3. Физическая реализуемость цифровых регуляторов.
7.4. Реализация цифровых регуляторов импульсными фильтрами.
7.5. Реализация цифровых регуляторов на базе цву.
8. Методические указания и вариаты расчетно-графического задания
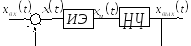
Рис.5. Обобщенная структурная схема импульсной системы
(ИЭ – импульсный элемент; НЧ – непрерывная часть)
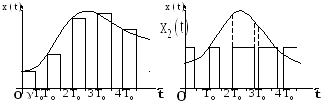
Рис.6. Амплитудно-импульсная модуляция Рис.2. Широтно-импульсная
в импульсной системе модуляция
![]()
![]()

Рис.8.Частотно-импульсная модуляция
![]()
1.4. Простейший импульсный элемент. Формирующий элемент. Фиксатор.
Поскольку
форма импульсов на выходе ИЭ может быть
самой разнообразной (прямоугольной,
треугольной, кусочно-экспоненциальной),
для единства подхода к исследованию
импульсных САУ используют следующий
эффективный метод их математического
описания: ИЭ, формирующий на выходе
последовательность импульсов определенной
формы, заменяется последовательно
соединенным идеализированным элементом,
генерирующим модулированные
![]() -
функции (простейшим импульсным
элементом – ПИЭ иликвантователем),
иформирующим элементом (ФЭ),
преобразующим последовательность
-
функции (простейшим импульсным
элементом – ПИЭ иликвантователем),
иформирующим элементом (ФЭ),
преобразующим последовательность![]() -
функций в последовательность импульсов
заданной формы (рис. 9). У модулированной
-
функций в последовательность импульсов
заданной формы (рис. 9). У модулированной![]() -
функции, как и у немодулированной,
амплитуда стремится к бесконечности,
а длительность – к нулю, при этом площадь
импульса, сформированного ПИЭ в момент
-
функции, как и у немодулированной,
амплитуда стремится к бесконечности,
а длительность – к нулю, при этом площадь
импульса, сформированного ПИЭ в момент![]() ,
равна
,
равна ![]() ,
то есть:
,
то есть:
![]() .
.
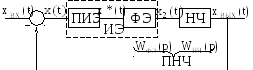
Рис.9. Детализированная структурная схема
импульсной системы
Обозначим
передаточную функцию ФЭ как
![]() ,
а функцию времени, описывающую импульсы
на его выходе, как
,
а функцию времени, описывающую импульсы
на его выходе, как![]() .
Тогда, учитывая, что выходной сигнал ФЭ
представляет собой реакцию на
.
Тогда, учитывая, что выходной сигнал ФЭ
представляет собой реакцию на![]() -
функцию, т.е. является функцией веса ФЭ,
можно записать:
-
функцию, т.е. является функцией веса ФЭ,
можно записать:
![]() (6)
(6)
где
![]() -
оператор преобразования Лапласа;S(p)-
изображениеS(t).
-
оператор преобразования Лапласа;S(p)-
изображениеS(t).
Ниже приведены примеры определения передаточных функций ФЭ для двух различных форм импульсов на выходе ИЭ.
Пример 1.
Необходимо определить передаточную
функцию ФЭ, выходные импульсы которого
имеют прямоугольную форму и скважность
![]() (рис. 10). Такой импульс можно описать
следующим образом:
(рис. 10). Такой импульс можно описать
следующим образом:
![]() ,
,
где
![]() -
несмещенная и запаздывающая на один
интервал квантования (один такт
квантования) единичные ступенчатые
функции.
-
несмещенная и запаздывающая на один
интервал квантования (один такт
квантования) единичные ступенчатые
функции.
Используя свойство линейности преобразования Лапласа, имеем:

![]() .
(7)
.
(7)
Рис.10. Форма импульса
на выходе фиксатора
ФЭ с передаточной функцией (7) называется экстраполятором нулевого порядкаили фиксатором.
Амплитудно-частотная характеристика фиксатора:
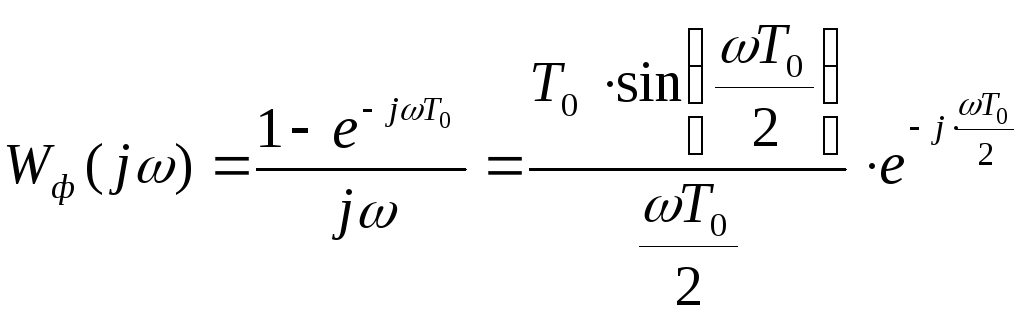 (8)
(8)
Графики
амплитудно-частотной
![]() и фазо-частотной
и фазо-частотной![]() характеристик приведены на рис11.
характеристик приведены на рис11.
ФЭ, генерирующий импульсы указанной формы, наиболее часто используется в дискретных САУ. Так, цифро-аналоговые преобразователи, обеспечивающие фиксацию выходного аналогового сигнала на уровне, определенном текущим значением входного цифрового кода, описывается передаточной функцией (7).
Пример 2. Необходимо определить передаточную функцию ФЭ, выходные импульсы которого имеют синусоидальную форму (рис. 12), описываемую следующим образом:
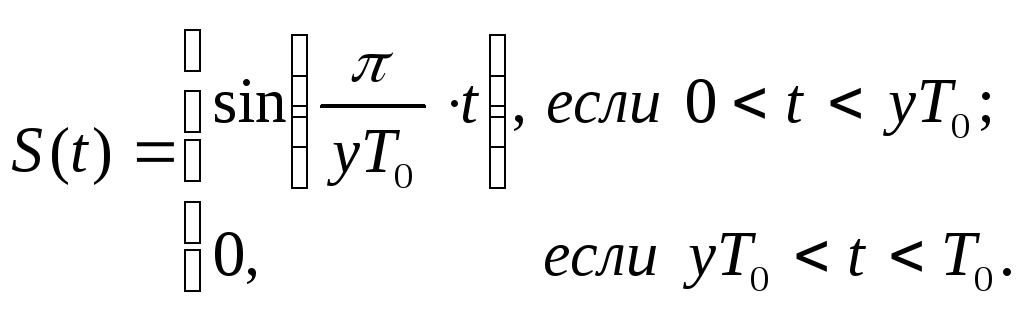
В отличие от предыдущего примера функцию S(t)невозможно представить в виде суммы элементарных слагаемых с известными изображениями.
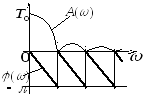
Рис.11.
Амплитудно-частотная
![]() и
и
фазо-частотная
![]() характеристики фиксатора
характеристики фиксатора
Поэтому для
определения
![]() непосредственно используется формула
преобразования Лапласа:
непосредственно используется формула
преобразования Лапласа:
 .
.
Если
непрерывная часть системы линейна и
имеет передаточную функцию
![]() ,
то ФЭ можно отнести к непрерывной части
и ввести в рассмотрениеприведенную
непрерывную часть (ПНЧ), имеющую
передаточную функцию:
,
то ФЭ можно отнести к непрерывной части
и ввести в рассмотрениеприведенную
непрерывную часть (ПНЧ), имеющую
передаточную функцию:
![]() . (9)
. (9)
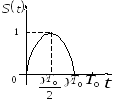
Рис.12. Форма импульса на выходе ФЭ
(пример 2)
При таком
подходе дискретность, присущая САУ,
определяется исключительно наличием
ПИЭ, математическое описание которого
не зависит от формы импульса. Выходной
сигнал ПНЧ, на вход которой поступают
модулированные
![]() -
функции, представляет собойнепрерывный
сигнал, равный сумме смещенных функции
веса ПНЧ:
-
функции, представляет собойнепрерывный
сигнал, равный сумме смещенных функции
веса ПНЧ:
![]() .
(10)
.
(10)
2. Основы теории z-преобразования
2.1. Дискретное преобразование Лапласа. Z-преобразование.
С учетом (5) можно определить изображение по Лапласу входной величины ПИЭ:
![]()
![]() .
.
Поскольку
![]() при всехt, отличных
от
при всехt, отличных
от![]() ,
окончательно имеем
,
окончательно имеем
 ,
(11)
,
(11)
где D{…}
– символдискретного преобразования
ЛапласаилиD-преобразования.
Следовательно, непрерывное преобразование
Лапласа (L-преобразование)
модулированной последовательности![]() -
функций равно дискретному преобразованию
Лапласа (D-преобразованию)
соответствующей решетчатой функции:
-
функций равно дискретному преобразованию
Лапласа (D-преобразованию)
соответствующей решетчатой функции:
![]() .
.
Наличие экспоненциальных членов в D-изображениях и связанная с этим необходимость оперировать трансцендентными уравнениями и передаточными функциями несколько усложняет использованиеD- преобразования.
Если в
(11)
![]() заменить наz, то
получим формулу так называемогоZ-преобразованиядля дискретных значений сигнала:
заменить наz, то
получим формулу так называемогоZ-преобразованиядля дискретных значений сигнала:
![]()
![]() (12)
(12)
где комплексные переменные pиzсвязаны между собой следующим образом:
![]() (13)
(13)
Следует отметить, что согласно (12) Z-изображение представляет собой сумму членов бесконечного ряда. Если возможно, то необходимо преобразовывать его в компактную форму.
Рассмотрим несколько примеров определения Z-изображений для различных типов сигналов.
Пример 3.
Необходимо найти Z-изображение
выходного сигнала ПИЭ, входной сигнал
которого – экспоненциальная функция
![]() .
.