Файл: Г.М. Гринфельд ТЕОРИЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ уч. пособие.doc
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 29.07.2024
Просмотров: 466
Скачиваний: 3
СОДЕРЖАНИЕ
1. ОсновНые понятия и определения теории автоматического управления
1.1. Краткие сведения по истории развития систем автоматического управления
1.2. Обобщенная структурная схема сау
2. Математическое описание линейных сау
2.1. Составление и линеаризация дифференциальных уравнений сау
Основные свойства (теоремы) преобразования Лапласа
Изображения по Лапласу типовых сигналов
2.3. Временные и частотные характеристики звеньев и систем
2.4. Элементарные звенья систем автоматического управления
Пропорциональное (усилительное, безинерционное, масштабирующее) звено
Идеальное дифференцирующее звено
Апериодическое звено первого порядка
Реальное дифференцирующее звено
Инерционное звено второго порядка
Интегро-дифференцирующее звено
Пропорционально-интегральный регулятор (пи-регулятор)
2.5. Неминимально-фазовые звенья
2.6. Эквивалентные преобразования структурных схем линейных сау
2.7. Передаточные функции многоконтурных систем
3. Анализ устойчивости линейныхсау
3.1.Понятие устойчивости линейных систем
3.2.Алгебраический критерий устойчивости Гурвица
3.3.Частотные критерии устойчивости Михайлова и Найквиста
3.5.Оценка устойчивости по логарифмическим амплитудно- и фазо-частотным характеристикам
3.6.Устойчивость систем с запаздыванием
4. Качество динамических характеристик сау
4.1. Показатели качества процесса регулирования
4.2. Частотные критерии качества
4.3. Корневые критерии качества
4.4. Интегральные критерии качества
5.1. Стационарные режимы сау. Передаточные функции статических и астатических систем
5.2. Коэффициенты ошибки системы
5.3. Системы комбинированного управления
6. Анализ сау в пространстве состояния
6.1. Основные положения метода переменных состояния
6.2. Способы построения схем переменных состояния
Метод прямого программирования
Метод параллельного программирования
Метод последовательного программирования
6.3. Решение уравнений состояния линейных стационарных сау. Вычисление фундаментальной матрицы
Последовательные корректирующие звенья
Параллельные корректирующие звенья
7.2. Частотный метод синтеза корректирующих устройств
Построение лах в низкочастотном диапазоне
Построение лах в среднечастотном диапазоне
Зависимость колебательности от значений hи h1
Построение лах в высокочастотном диапазоне
7.3. Последовательные корректирующие устройства
7.4. Параллельные корректирующие устройства
7.5. Техническая реализация корректирующих звеньев
Пассивные четырехполюсники постоянного тока
Пассивные корректирующие четырехполюсники
Активные корректирующие звенья
Активные четырехполюсники постоянного тока
8. Нелинейные системы автоматического управления
8.1. Особенности нелинейных систем и методы их анализа
8.2. Исследование нелинейных систем на фазовой плоскости
8.3. Метод гармонической линеаризации нелинейных звеньев
Коэффициенты гармонической линеаризации типовых нелинейностей
8.5. Методы определения параметров автоколебаний
Задание для расчета линейной caу
Варианты задания для расчета линейной сау
Варианты передаточных функций линейной сау
Задание для расчета нелинейной сау
Варианты задания для расчета нелинейной сау
Варианты структурных схем нелинейных систем Варианты статических характеристик нелинейного элемента
Для нормальной работы САУ необходимо, чтобы запас устойчивости по усилению α был не менее двух, а запас устойчивости по фазе – от 0,5 до 1 рад.
3.5.Оценка устойчивости по логарифмическим амплитудно- и фазо-частотным характеристикам
Оценку устойчивости замкнутой САУ можно осуществлять по логарифмическим амплитудно- и фазо-частотным характеристикам системы в разомкнутом состоянии: L(ω) и φ(ω). В том случае, когда годограф W(jω) не имеет точек пересечения с вещественной осью слева от точки с координатами (-1, j0), для устойчивости замкнутой системы необходимо и достаточно, чтобы выполнялось условие
ωс < ωкр.
Н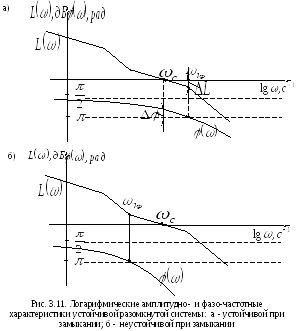 а
рис.3.11
приведены ЛАХ и ФЧХ устойчивых разомкнутых
системы, одна из которых при замыкании
остается устойчивой
(рис. 3.11,
а), а другая
– становится неустойчивой (рис. 3.11,
б).
а
рис.3.11
приведены ЛАХ и ФЧХ устойчивых разомкнутых
системы, одна из которых при замыкании
остается устойчивой
(рис. 3.11,
а), а другая
– становится неустойчивой (рис. 3.11,
б).
По L(ω) и φ(ω) разомкнутой системы можно определить запасы устойчивости: запас по фазе Δφ отсчитывают по фазо-частотной характеристике на частоте среза ωс, а запас устойчивости по усилению ΔL равен значению ЛАХ на критической частоте ωкр, взятому с обратным знаком, т.е. ΔL = |L(ωкр)| (см. рис. 3.11, а).
Если ωс = ωкр, то система находится на границе устойчивости.
Если при некотором значении коэффициента усиления (k) замкнутая система устойчива с запасом устойчивости по усилению равным ΔL, то величина критического коэффициента усиления kкр может быть вычислена по формуле:
20lg kкр = 20lg k + ΔL.
Для оценки устойчивости условно устойчивых САУ реальных технических систем, имеющих обычно достаточно сложную форму, также можно воспользоваться понятием перехода. При этом переходом называется пересечение графика φ(ω) с горизонтальной прямой -π, при условии, что на частоте, при которой φ(ω) = – π, ЛАХ положительна.
Правило определения знака перехода противоположно рассмотренному для W(jω): переход графика φ(ω) через уровень(- π) считается положительным, если при увеличении частоты ω пересечение этого уровня происходит снизу вверх, в противном случае переход считается отрицательным. Обозначим число положительных переходов m+ , а число отрицательных переходов m- .
В этом случае формулировка критерия устойчивости Найквиста: система в замкнутом состоянии становится устойчивой, если разность между числом положительных и отрицательных переходов равна m/2, т.е.
m+ – m- = m/2, (3.23)
где m – число правых полюсов разомкнутой системы.
Если
число положительных переходов φ(ω)
равно числу
отрицательных,
то система,
устойчивая в разомкнутом состоянии
![]() ,
остается устойчивой при замыкании. На
рис.
3.12 в качестве примера приведены
логарифмические
амплитудно- и фазо-частотные характеристики
неустойчивой
разомкнутой
системы, имеющей два правых полюса
,
остается устойчивой при замыкании. На
рис.
3.12 в качестве примера приведены
логарифмические
амплитудно- и фазо-частотные характеристики
неустойчивой
разомкнутой
системы, имеющей два правых полюса
![]() .
При замыкании такая система становится
устойчивой, так как m+
= 1, а
m-
= 0,
и условие (3.23) выполняется.
.
При замыкании такая система становится
устойчивой, так как m+
= 1, а
m-
= 0,
и условие (3.23) выполняется.
Р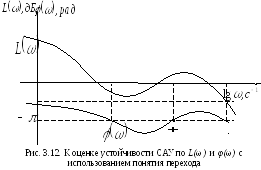 екомендации
для обеспечения запаса устойчивости,
которые следуют из практики проектирования
САУ:
екомендации
для обеспечения запаса устойчивости,
которые следуют из практики проектирования
САУ:
во-первых, для того чтобы в системе были обеспечены необходимые запасы устойчивости, наклон ЛАХ в диапазоне частот, в котором расположена частота среза, должен быть равен -20 дБ/дек. Если в указанном частотном диапазоне наклон L(ω) равен -40 дБ/дек, обеспечить необходимый запас устойчивости по фазе затруднительно. При наклоне 0 дБ/дек система обладает чрезмерно большим запасом устойчивости по фазе и становится передемпфированной с длительным переходным процессом:
во-вторых, запас устойчивости системы по фазе зависит от диапазона частот, в котором ЛАХ разомкнутой системы в области частоты среза имеет наклон -20 дБ/дек. Чем шире этот диапазон частот, тем выше запас устойчивости по фазе и наоборот.
3.6.Устойчивость систем с запаздыванием
Рассмотрим устойчивость САУ, в состав которой входит звено чистого запаздывания. Передаточную функцию такой системы в разомкнутом состоянии запишем в виде
W(p) = Wбз(p)∙e-τp, (3.24)
где Wбз(p) – передаточная функция разомкнутой системы без учета звена чистого запаздывания; τ – время запаздывания.
Передаточной функции (3.24) соответствуют следующие амплитудно- и фазо-частотные характеристики разомкнутой системы:
│W(p)│ = │Wбз(p)│;
L(ω)= Lбз(ω);
φ(ω) = φбз(ω) – ωτ,
где Lбз(ω), φбз(ω) – соответственно логарифмические амплитудно- и фазо-частотная характеристики разомкнутой системы без запаздывания.
Из этих характеристик следует, что запаздывание влияет только на фазо-частотную характеристику, создавая дополнительный отрицательный фазовый сдвиг. Поэтому устойчивые САУ, не содержащие звеньев чистого запаздывания, могут становиться неустойчивыми при включении в их состав таких звеньев.
Рассмотрим устойчивую систему с запасом устойчивости по фазе, равным Δφ. При увеличении времени запаздывания τ ЛАХ системы не изменяется, а ее фазо-частотная характеристика деформируется и перемещается вниз. Следовательно, частота среза системы остается прежней, критическая частота уменьшается, а запас устойчивости по фазе сокращается. При увеличении τ до критического значения τкр наступает равенство:
ωс = ωкр,
т.е. система оказывается на границе устойчивости. При этом φ(ωс) = – π . Очевидно, что такому состоянию системы соответствует равенство Δφ = ωс∙ τкр, откуда величина критического времени запаздывания равна
τкр
=![]() .
.
Вопросы для самопроверки
Дайте определение устойчивости САУ.
Сформулируйте необходимое условие устойчивости системы.
Поясните различие между прямым и косвенным методами оценки устойчивости.
Что такое критерии устойчивости? Каким образом они связаны с необходимым и достаточным условиями устойчивости?
Что такое граница устойчивости? Как по отношению к ней расположены полюса устойчивой системы?
Сформулируйте критерий устойчивости Гурвица.
Каким образом по критерию Гурвица вычисляется критический коэффициент усиления и запас устойчивости по усилению?
Сформулируйте критерий устойчивости Найквиста.
Что такое частота среза и критическая частота? Каким образом определяются эти частоты по годографам АФХ и ЛАФЧХ?
Что такое запасы устойчивости? Каким образом они определяются по годографам АФХ и ЛАФЧХ?
Как по ЛАЧХ определяется критический коэффициент усиления?
Как по ЛАФЧХ определяется критическое время запаздывания?
4. Качество динамических характеристик сау
4.1. Показатели качества процесса регулирования
Устойчивость САУ является необходимым, но не достаточным условием эффективного функционирования системы. Не менее важно, чтобы процесс регулирования осуществлялся при обеспечении определенных показателей качества. Требования к качеству переходного процесса могут быть самыми разнообразными, однако к числу наиболее существенных критериев, с помощью которых оценивается поведение системы в динамике, относятся следующие:
показатели качества переходного процесса, определяемые по переходной функции системы;
частотные критерии качества; корневые критерии качества;
интегральные критерии качества.
Поскольку переходный процесс в системе определяется не только параметрами САУ, но и характером внешнего воздействия, оценку качества регулирования осуществляют по виду реакции системы на типовой входной сигнал. Наиболее часто характер протекания переходного процесса оценивается по переходной функции системы.
Основными показателями качества процесса регулирования, определяемыми по переходной функции системы (рис. 4.1), являются: время регулирования (tp), перерегулирование (σ), частота (ω) и число колебаний.
В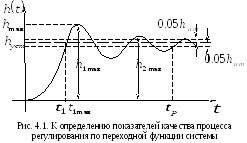 ременем
регулирования
tp
называется
временной интервал, отсчитываемый с
момента приложения воздействия к системе
до момента, начиная с которого отклонение
регулируемой величины
ременем
регулирования
tp
называется
временной интервал, отсчитываемый с
момента приложения воздействия к системе
до момента, начиная с которого отклонение
регулируемой величины
![]() от ее установившегося значения
от ее установившегося значения![]() не
превышает наперед заданной величины
не
превышает наперед заданной величины![]() .
.
Обычно
принимают
![]() равной 5 % от
равной 5 % от![]() Таким образом, время регулирования
определяет длительность переходного
процесса, т.е. быстродействие системы.
Величинаtp
должна быть ограничена не только сверху,
но и снизу, поскольку при повышении
быстродействия системы время регулирования
уменьшается, но при этом возрастают
динамические нагрузки, что отрицательно
сказывается на сроке службы САУ.
Таким образом, время регулирования
определяет длительность переходного
процесса, т.е. быстродействие системы.
Величинаtp
должна быть ограничена не только сверху,
но и снизу, поскольку при повышении
быстродействия системы время регулирования
уменьшается, но при этом возрастают
динамические нагрузки, что отрицательно
сказывается на сроке службы САУ.
Перерегулированием
σ
называется максимальное отклонение
регулируемой величины
![]() от установившегося значения
от установившегося значения![]() ,
выраженное в процентах.
,
выраженное в процентах.
Абсолютная величина отклонения определяется по графику переходной функции:
![]()
![]() .
.
Соответственно перерегулирование равно:
![]() ℅.
(4.1)
℅.
(4.1)
Допустимое значение перерегулирования определяется спецификой функционирования конкретной системы. Обычно оно составляет 10 – 30 %, но для ряда САУ перерегулирование принципиально недопустимо.
Колебательность
переходного процесса определяется
числом колебаний регулируемой величины
за время регулирования tp,
например, числом минимумов за этот
интервал. Приемлемым считается от
одного до трех колебаний. Иногда
колебательность определяют, как отношение
величин первого (![]() )
и второго (
)
и второго (![]() )
максимумов переходной функции выраженное
в процентах.
)
максимумов переходной функции выраженное
в процентах.
Частота колебаний равна:
![]()
где T – период колебаний.
В
случае необходимости к перечисленным
показателям качества процесса
регулирования
добавляются следующие: время достижения
первого максимума![]() ,
время первого достижения уровня
установившегося значения
,
время первого достижения уровня
установившегося значения![]() ,
декремент затухания, равный:
,
декремент затухания, равный:
![]() ,
,
и ряд других.