Файл: Г.М. Гринфельд ТЕОРИЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ уч. пособие.doc
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 29.07.2024
Просмотров: 472
Скачиваний: 3
СОДЕРЖАНИЕ
1. ОсновНые понятия и определения теории автоматического управления
1.1. Краткие сведения по истории развития систем автоматического управления
1.2. Обобщенная структурная схема сау
2. Математическое описание линейных сау
2.1. Составление и линеаризация дифференциальных уравнений сау
Основные свойства (теоремы) преобразования Лапласа
Изображения по Лапласу типовых сигналов
2.3. Временные и частотные характеристики звеньев и систем
2.4. Элементарные звенья систем автоматического управления
Пропорциональное (усилительное, безинерционное, масштабирующее) звено
Идеальное дифференцирующее звено
Апериодическое звено первого порядка
Реальное дифференцирующее звено
Инерционное звено второго порядка
Интегро-дифференцирующее звено
Пропорционально-интегральный регулятор (пи-регулятор)
2.5. Неминимально-фазовые звенья
2.6. Эквивалентные преобразования структурных схем линейных сау
2.7. Передаточные функции многоконтурных систем
3. Анализ устойчивости линейныхсау
3.1.Понятие устойчивости линейных систем
3.2.Алгебраический критерий устойчивости Гурвица
3.3.Частотные критерии устойчивости Михайлова и Найквиста
3.5.Оценка устойчивости по логарифмическим амплитудно- и фазо-частотным характеристикам
3.6.Устойчивость систем с запаздыванием
4. Качество динамических характеристик сау
4.1. Показатели качества процесса регулирования
4.2. Частотные критерии качества
4.3. Корневые критерии качества
4.4. Интегральные критерии качества
5.1. Стационарные режимы сау. Передаточные функции статических и астатических систем
5.2. Коэффициенты ошибки системы
5.3. Системы комбинированного управления
6. Анализ сау в пространстве состояния
6.1. Основные положения метода переменных состояния
6.2. Способы построения схем переменных состояния
Метод прямого программирования
Метод параллельного программирования
Метод последовательного программирования
6.3. Решение уравнений состояния линейных стационарных сау. Вычисление фундаментальной матрицы
Последовательные корректирующие звенья
Параллельные корректирующие звенья
7.2. Частотный метод синтеза корректирующих устройств
Построение лах в низкочастотном диапазоне
Построение лах в среднечастотном диапазоне
Зависимость колебательности от значений hи h1
Построение лах в высокочастотном диапазоне
7.3. Последовательные корректирующие устройства
7.4. Параллельные корректирующие устройства
7.5. Техническая реализация корректирующих звеньев
Пассивные четырехполюсники постоянного тока
Пассивные корректирующие четырехполюсники
Активные корректирующие звенья
Активные четырехполюсники постоянного тока
8. Нелинейные системы автоматического управления
8.1. Особенности нелинейных систем и методы их анализа
8.2. Исследование нелинейных систем на фазовой плоскости
8.3. Метод гармонической линеаризации нелинейных звеньев
Коэффициенты гармонической линеаризации типовых нелинейностей
8.5. Методы определения параметров автоколебаний
Задание для расчета линейной caу
Варианты задания для расчета линейной сау
Варианты передаточных функций линейной сау
Задание для расчета нелинейной сау
Варианты задания для расчета нелинейной сау
Варианты структурных схем нелинейных систем Варианты статических характеристик нелинейного элемента
Инерционное звено второго порядка
Инерционное звено второго порядка – это звено, зависимость между выходным и входным сигналами которого описывается следующим дифференциальным уравнением:
![]()
г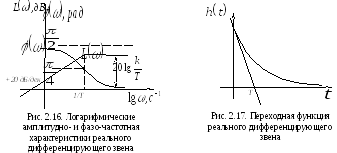 деk,
T –
соответственно коэффициент усиления
и постоянная времени звена;
деk,
T –
соответственно коэффициент усиления
и постоянная времени звена;
![]() -
коэффициент демпфирования.
-
коэффициент демпфирования.
Операторное уравнение звена:
![]()
Передаточная функция звена:
![]() .
(2.51)
.
(2.51)
Примерами реализации инерционного звена второго порядка являются RLC-контур, состоящий из катушки индуктивности, резистора и конденсатора, или физический маятник.
Амплитудно- и фазо-частотная характеристики:
A(ω)![]() ;
;
![]() .(2.52)
.(2.52)
В
зависимости от значения коэффициента
демпфирования
![]() свойства инерционного звена второго
порядка изменяются настолько существенно,
что при различных значениях
свойства инерционного звена второго
порядка изменяются настолько существенно,
что при различных значениях![]() это звено имеет различные названия:консервативное,
колебательное
или апериодическое
звено второго порядка.
это звено имеет различные названия:консервативное,
колебательное
или апериодическое
звено второго порядка.
Консервативное звено:
 ,
передаточная функция (2.51) принимает
вид:
,
передаточная функция (2.51) принимает
вид:
![]() .
(2.53)
.
(2.53)
При
этом ее полюса чисто мнимые:
![]() .
.
В соответствии с (2.15) и (2.23) выражения переходной функции и функции веса консервативного звена:
![]()
![]() ;
;
![]() =
=![]() .
.
Колебательное звено:
 ,
полюса передаточной функции (2.51) –
комплексно-сопряженные числа. С учетом
(2.52)
логарифмическая амплитудно-частотная
характеристика звена примет вид:
,
полюса передаточной функции (2.51) –
комплексно-сопряженные числа. С учетом
(2.52)
логарифмическая амплитудно-частотная
характеристика звена примет вид:
![]() .
.
Кусочно-асимптотическая
ЛАЧХ звена состоит из двух участков. На
низкочастотном участке до частоты
сопряжения
![]() уравнение горизонтальной асимптоты:
уравнение горизонтальной асимптоты:
![]() ,
,
а в диапазоне частот много больше частоты сопряжения уравнение высокочастотной асимптоты:
![]()
Последнее уравнение – это уравнение прямой с наклоном -40 дБ/дек.
В
окрестности частоты сопряжения график
ЛАЧХ колебательного звена при
![]() имеет
амплитудный всплеск («горб»), величина
которого тем больше, чем меньше коэффициент
демпфирования
имеет
амплитудный всплеск («горб»), величина
которого тем больше, чем меньше коэффициент
демпфирования![]() .
У консервативного звена при
.
У консервативного звена при![]() амплитудный всплеск вырождается в
разрыв непрерывности.
амплитудный всплеск вырождается в
разрыв непрерывности.
Выражения переходной функции и функции веса колебательного звена:
![]()
 ;
;
![]() =
=
![]() ;
;
где
![]() .
.
Апериодическое звено второго порядка:
 ,
полюса передаточной функции (2.51) –
действительные числа, поэтому
передаточную функцию звена можно
представить в следующем виде:
,
полюса передаточной функции (2.51) –
действительные числа, поэтому
передаточную функцию звена можно
представить в следующем виде:
![]() .
(2.54)
.
(2.54)
Очевидно, что между коэффициентами передаточных функций (2.51) и (2.54) существуют следующие зависимости:
![]()
 и
и
![]()
![]() .
.
Уравнения логарифмических амплитудно- и фазо-частотной характеристик:
![]()
![]() ;
;
![]()
![]() .
.
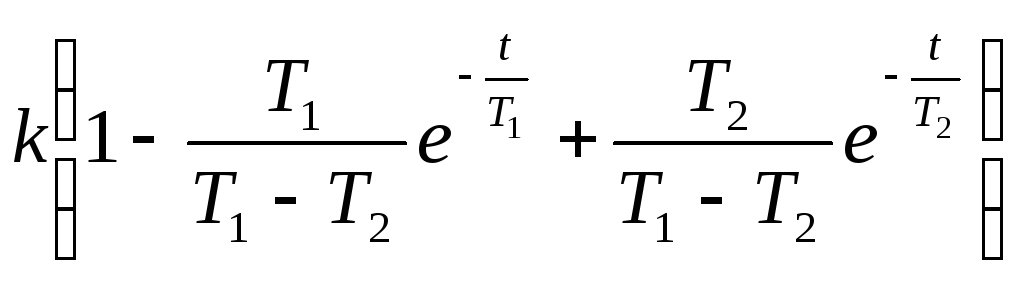
В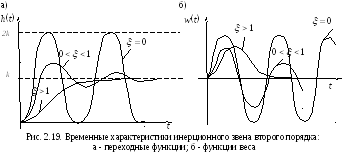 ыражения
для временных характеристик апериодического
звена второго порядка:
ыражения
для временных характеристик апериодического
звена второго порядка:
![]()
 ;
;
![]() =
=
 .
.
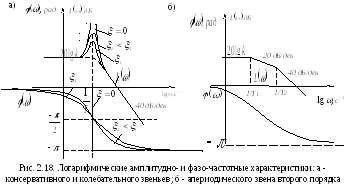
Графики логарифмических амплитудно- и фазочастотной характеристик инерционного звена второго порядка для различных значений коэффициента демпфирования приведены на рис. 2.18; графики временных характеристик – на рис. 2.19.
Звено чистого запаздывания
Звено
чистого запаздывания
– это звено,
выходной сигнал которого полностью
совпадает по форме с входным сигналом,
но отстает от него на время
![]() ,
т.е.
,
т.е.
![]() .
.
На
основании теоремы запаздывания (2.11):
![]()
![]() .
Следовательно, передаточная функция
звена имеет вид:
.
Следовательно, передаточная функция
звена имеет вид:
![]() ,
,
где
![]() – время
запаздывания.
– время
запаздывания.
Частотные характеристики для звена чистого запаздывания:
![]() cos(ω)
– j
sin
(ω);
cos(ω)
– j
sin
(ω);
т.е. P(ω) = cos(ω) и Q(ω)= – sin (ω);
A(ω)
= 1,
![]() ω
ω![]() ,
,
![]() .
.
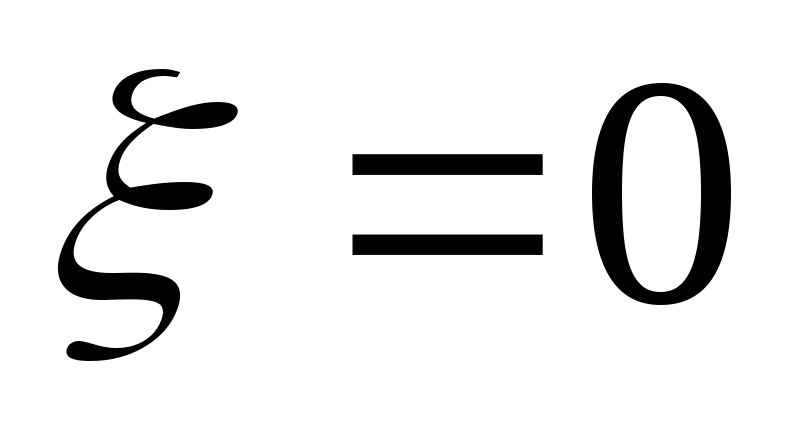
На рис.2.20 приведен график переходной функции звена, на рис.2.21 – годограф АФХ, а на рис. 2.22 – логарифмические амплитудно- и фазо-частотные характеристики.
Интегро-дифференцирующее звено
Интегро-дифференцирующее звено порядка – это звено, зависимость между выходным и входным сигналами которого описывается следующим дифференциальным уравнением:
![]()
Операторное уравнение звена:
![]() .
.
Передаточная функция звена
![]() .
.
Частотные характеристики:
![]() ;
;
 ;
; ;
(2.55)
;
(2.55)
Выполнив
несложные преобразования, можно
представить АФХ звена в виде функции,
связывающей вещественную
![]() и
мнимую
и
мнимую![]() частотные
характеристики:
частотные
характеристики:
![]() ,
(2.56)
,
(2.56)
где
![]() ;
;
![]() .
.
С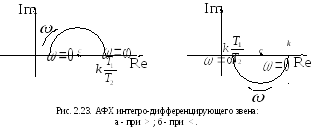 огласно
(2.55) – (2.56) годограф АФХ интегро-дифференцирующего
звена имеет вид полуокружности с радиусом
огласно
(2.55) – (2.56) годограф АФХ интегро-дифференцирующего
звена имеет вид полуокружности с радиусом![]() ,
центр которой находится на действительной
положительной полуоси в точке
,
центр которой находится на действительной
положительной полуоси в точке![]() .
При этом годограф
.
При этом годограф![]() расположен
в первом квадранте, еслиT1
> T2
(рис. 2.32,
а), и в четвертом квадранте, если T1
<T2
(рис.
2.32, б).
расположен
в первом квадранте, еслиT1
> T2
(рис. 2.32,
а), и в четвертом квадранте, если T1
<T2
(рис.
2.32, б).
Вид всех остальных характеристик интегро-дифференцирующего звена также определяется соотношением между постоянными времени T1 и T2:
A(ω)=![]() =
= ;
;