Файл: Г.М. Гринфельд ТЕОРИЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ уч. пособие.doc
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 29.07.2024
Просмотров: 543
Скачиваний: 3
СОДЕРЖАНИЕ
1. ОсновНые понятия и определения теории автоматического управления
1.1. Краткие сведения по истории развития систем автоматического управления
1.2. Обобщенная структурная схема сау
2. Математическое описание линейных сау
2.1. Составление и линеаризация дифференциальных уравнений сау
Основные свойства (теоремы) преобразования Лапласа
Изображения по Лапласу типовых сигналов
2.3. Временные и частотные характеристики звеньев и систем
2.4. Элементарные звенья систем автоматического управления
Пропорциональное (усилительное, безинерционное, масштабирующее) звено
Идеальное дифференцирующее звено
Апериодическое звено первого порядка
Реальное дифференцирующее звено
Инерционное звено второго порядка
Интегро-дифференцирующее звено
Пропорционально-интегральный регулятор (пи-регулятор)
2.5. Неминимально-фазовые звенья
2.6. Эквивалентные преобразования структурных схем линейных сау
2.7. Передаточные функции многоконтурных систем
3. Анализ устойчивости линейныхсау
3.1.Понятие устойчивости линейных систем
3.2.Алгебраический критерий устойчивости Гурвица
3.3.Частотные критерии устойчивости Михайлова и Найквиста
3.5.Оценка устойчивости по логарифмическим амплитудно- и фазо-частотным характеристикам
3.6.Устойчивость систем с запаздыванием
4. Качество динамических характеристик сау
4.1. Показатели качества процесса регулирования
4.2. Частотные критерии качества
4.3. Корневые критерии качества
4.4. Интегральные критерии качества
5.1. Стационарные режимы сау. Передаточные функции статических и астатических систем
5.2. Коэффициенты ошибки системы
5.3. Системы комбинированного управления
6. Анализ сау в пространстве состояния
6.1. Основные положения метода переменных состояния
6.2. Способы построения схем переменных состояния
Метод прямого программирования
Метод параллельного программирования
Метод последовательного программирования
6.3. Решение уравнений состояния линейных стационарных сау. Вычисление фундаментальной матрицы
Последовательные корректирующие звенья
Параллельные корректирующие звенья
7.2. Частотный метод синтеза корректирующих устройств
Построение лах в низкочастотном диапазоне
Построение лах в среднечастотном диапазоне
Зависимость колебательности от значений hи h1
Построение лах в высокочастотном диапазоне
7.3. Последовательные корректирующие устройства
7.4. Параллельные корректирующие устройства
7.5. Техническая реализация корректирующих звеньев
Пассивные четырехполюсники постоянного тока
Пассивные корректирующие четырехполюсники
Активные корректирующие звенья
Активные четырехполюсники постоянного тока
8. Нелинейные системы автоматического управления
8.1. Особенности нелинейных систем и методы их анализа
8.2. Исследование нелинейных систем на фазовой плоскости
8.3. Метод гармонической линеаризации нелинейных звеньев
Коэффициенты гармонической линеаризации типовых нелинейностей
8.5. Методы определения параметров автоколебаний
Задание для расчета линейной caу
Варианты задания для расчета линейной сау
Варианты передаточных функций линейной сау
Задание для расчета нелинейной сау
Варианты задания для расчета нелинейной сау
Варианты структурных схем нелинейных систем Варианты статических характеристик нелинейного элемента
3.2.Алгебраический критерий устойчивости Гурвица
Для оценки устойчивости линейной системы по критерию Гурвица необходимо из коэффициентов характеристического уравнения (3.5) составить определитель Гурвица, размерность которого равна порядку системы.
Определитель Гурвица имеет вид:
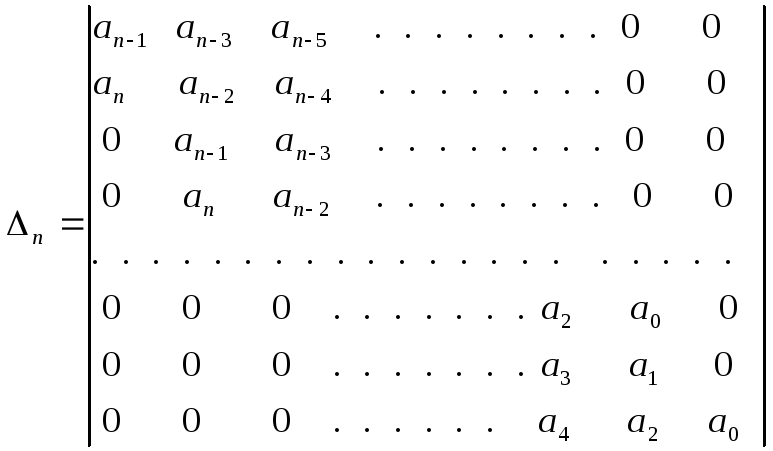 .
(3.8)
.
(3.8)
Порядок
составления определителя Гурвица
следующий. В качестве элемента первого
столбца первой строки определителя
записывается коэффициент
an-1,
а затем на главной диагонали располагаются
коэффициенты характеристического
уравнения (3.4) с последовательно убывающими
индексами. При этом в последнем столбце
последней строки определителя записывается
коэффициент
![]() .
.
Затем, начиная от коэффициентов, стоящих на главной диагонали, заполняются столбцы определителя так, чтобы индексы коэффициентов, расположенных над коэффициентами главной диагонали, последовательно убывали, а коэффициентов, расположенных под диагональными коэффициентами, – последовательно возрастали. Если в процессе заполнения столбца определителя индекс коэффициента достигает значения n или 0, то дальнейшее заполнение столбца осуществляется нулями.
Далее необходимо вычислить значение определителя Гурвица и всех его диагональных миноров, которые получают из определителя (3.8) путем отчеркивания равного числа строк и столбцов в левом верхнем углу определителя. Например, диагональный минор первого порядка равен Δ1 = an-1 ; диагональный минор второго порядка:
Δ2
= ,
(3.9)
,
(3.9)
а диагональный минор третьего порядка:
Δ3
=
 .
(3.10)
.
(3.10)
Очевидно, что диагональный минор n-го порядка совпадает с определителем Гурвица.
Линейная система устойчива, если при выполнении необходимого условия (3.6), определитель Гурвица и все его диагональные миноры будут положительны:
Δ1 > 0, Δ2 > 0, …………,Δn > 0/
Раскрыв определитель Гурвица по последнему столбцу, получим
![]()
Так
как, в соответствие с выражением (3.6)
![]() >
0 и
>
0 и
![]() >
0,
то для проверки устойчивости системы
достаточно уточнить знаки диагональных
миноров с номерами от второго до
>
0,
то для проверки устойчивости системы
достаточно уточнить знаки диагональных
миноров с номерами от второго до
![]() .
.
Для системы второго порядка необходимое и достаточное условия устойчивости совпадают, так как для нее Δ1 = a1 > 0 .
Для системы третьего порядка:
Δ1 = a2 > 0; Δ2 = а1 ∙а2 – а0 ∙а3.
Следовательно, достаточное условие устойчивости:
а1 ∙а2 > а0 ∙а3. (3.11)
Если определитель Δn = 0, то САУ находится на границе устойчивости. При этом возможны два случая:
свободный член характеристического уравнения равен нулю, т.е. a0 = 0, что соответствует нейтрально устойчивой системе;
диагональный минор Δ(n-1) = 0, что соответствует колебательной границе устойчивости.
Из условия Δ(n-1) = 0 можно определить параметры, при которых САУ находится на границе устойчивости.
Рассмотрим в качестве примера замкнутую систему третьего порядка с единичной отрицательной обратной связью и передаточной функцией в разомкнутом состоянии:
![]() .
.
Передаточная функция такой системы в замкнутом состоянии в соответствие с выражением (2.63) равна:
![]() .
.
Характеристическое уравнение такой системы:
T1T2T3 p3 + (T1T2 + T2T3 + T1T3)р2 + (T1 + T2 + T3)р + (k + 1) = 0.
Следовательно:
![]() =
T1T2T3
,
=
T1T2T3
,
![]() T1T2
+ T2T3
+ T1T3
,
а1
=
T1
+ T2
+ T3
, а0
= k
+ 1.
(3.12)
T1T2
+ T2T3
+ T1T3
,
а1
=
T1
+ T2
+ T3
, а0
= k
+ 1.
(3.12)
В соответствии с выражениями (3.6) и (3.11) необходимое и достаточное условия устойчивости для системы третьего порядка определяются следующими неравенствами:
T1T2T3 > 0; T1T2 + T2T3 + T1T3 > 0; T1 + T2 + T3 > 0; k + 1 > 0;
(T1T2 + T2T3 + T1T3)∙(T1 + T2 + T3) > T1T2T3 ∙(k + 1).
Очевидно, что первые три неравенства выполняются при произвольных положительных значениях коэффициента усиления и постоянных времени. Последнее неравенство ограничивает сверху допустимое значение коэффициента усиления:
k < (T1 + T2 + T3 )∙(1/ T1 + 1/ T2 + 1/ T3) – 1 .
Предельное значение k, при котором система будет находиться на границе устойчивости, –критическое значение для рассматриваемой системы равно:
kкр = (T1 + T2 + T3 )∙(1/ T1 + 1/ T2 + 1/ T3) – 1.
Существенным недостатком критерия Гурвица является значительное усложнение условий устойчивости по мере увеличения порядка системы. Кроме того, для САУ высокого порядка достаточно трудно оценить влияние отдельных параметров звеньев на устойчивость системы. Это связано с тем, что, как правило, одни и те же параметры одновременно входят в несколько коэффициентов характеристического уравнения (смотри, например, выражение (3.12)).
3.3.Частотные критерии устойчивости Михайлова и Найквиста
Частотные критерии устойчивости основываются на использовании принципа аргумента. Рассмотрим этот принцип, для чего характеристический полином замкнутой системы
![]() (3.13)
(3.13)
в соответствие с теоремой Безу представим в виде:
F(p)
=
![]() ,
(3.14)
,
(3.14)
где
pi
– полюс передаточной функции замкнутой
системы (![]() ).
).
Поставляя в выражение (3.13) вместо p комплексную переменную jω, получим:
![]() .
(3.15)
.
(3.15)
После аналогичной подстановки в выражение (3.14) получим:
F(
jω) =
![]() .
(3.16)
.
(3.16)
Каждому
сомножителю
![]() в выражении
(3.16) на комплексной плоскости соответствует
некоторый вектор, положение которого
меняется при изменении ω.
в выражении
(3.16) на комплексной плоскости соответствует
некоторый вектор, положение которого
меняется при изменении ω.
Определим
изменение аргумента комплексной функции
F(jω)
при изменении частоты ω
от 0 до
![]() .
Для этого необходимо определить изменение
аргумента каждого из векторов
.
Для этого необходимо определить изменение
аргумента каждого из векторов![]() ,
поскольку
,
поскольку
![]()
 F(jω)
= ∑
F(jω)
= ∑![]() (jω
– pi).
(jω
– pi).
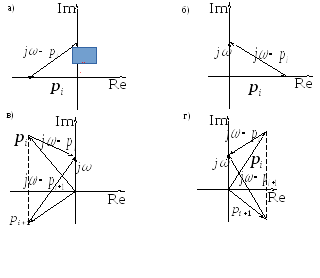
Если
корень характеристического уравнения
pi
действительный и отрицательный, т.е.
расположен на действительной оси
слева от начала координат (рис. 3.4, а), то
вектор
![]() поворачивается против часовой стрелки
на угол π/2,
если этот корень действительный и
положительный (рис. 3.4, б), то вектор
поворачивается по часовой стрелке на
угол π/2. Следовательно, для левого
действительного полюса
поворачивается против часовой стрелки
на угол π/2,
если этот корень действительный и
положительный (рис. 3.4, б), то вектор
поворачивается по часовой стрелке на
угол π/2. Следовательно, для левого
действительного полюса
![]()
![]() =
π/2,
=
π/2,
а для правого действительного полюса
![]()
![]() =
– π/2,
=
– π/2,
Нетрудно показать, что для пары комплексно сопряженных левых полюсов (рис. 3.4, в) изменение аргумента составляет +π, а для пары комплексно сопряженных правых полюсов (рис. 3.4, г) равно -π.
Если среди n полюсов передаточной функции замкнутой системы m расположены справа от мнимой оси, а остальные (n – m) – слева, то изменение аргумента комплексной функции F(jω) вектора равно:
![]() F(jω)
= (n – m)∙
π/2 – m∙π/2
= (n – 2m)∙π/2.
(3.17)
F(jω)
= (n – m)∙
π/2 – m∙π/2
= (n – 2m)∙π/2.
(3.17)
Выражение (3.17) и определяет суть принципа аргумента. В передаточной функции устойчивой системы правые полюса отсутствуют, т.е. m = 0, и изменение аргумента F(jω) равно:
![]() F(jω)
= n∙π/2.
(3.18)
F(jω)
= n∙π/2.
(3.18)
Из выражения (3.18) следует критерий устойчивости Михайлова, согласно которому изменение аргумента комплексной функции F(jω) определяется по годографу, который записывают в виде
F(jω) = Х(ω) + jY(ω) ,
где Х(ω),Y(ω) – действительная и мнимая составляющие комплексной функции F(jω);
Х(ω) = a0 – a2ω2 + a4ω4 – a6ω6 + ……;
Y(ω) = a1ω – a3ω3 + a5ω5 – a7ω7 + …….
К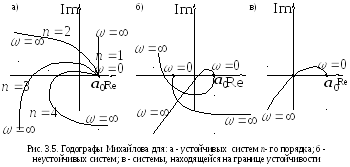 аждому
значениюω
= ωi на
комплексной плоскости соответствует
точка с координатами ( Х(ωi),Y(ωi)
). При изменении
ω эта
точка описывает на плоскости некоторую
траекторию, которая называется годографом
Михайлова
(рис. 3.5).
аждому
значениюω
= ωi на
комплексной плоскости соответствует
точка с координатами ( Х(ωi),Y(ωi)
). При изменении
ω эта
точка описывает на плоскости некоторую
траекторию, которая называется годографом
Михайлова
(рис. 3.5).
При ω = 0 Х(0) = a0, Y(0) = 0, т.е. F(0) = a0, причем в соответствии с выражением (3.6) a0 > 0.
Формулировка
критерия Михайлова:
замкнутая система устойчива, если
годограф F(jω),
начинаясь при ω
= 0 на
положительной действительной полуоси,
при изменении ω
от 0 до
![]() обходит последовательно в положительном
направлении (против часовой стрелки)n
квадрантов, где n
– порядок системы.
обходит последовательно в положительном
направлении (против часовой стрелки)n
квадрантов, где n
– порядок системы.