Файл: Г.М. Гринфельд ТЕОРИЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ уч. пособие.doc
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 29.07.2024
Просмотров: 491
Скачиваний: 3
СОДЕРЖАНИЕ
1. ОсновНые понятия и определения теории автоматического управления
1.1. Краткие сведения по истории развития систем автоматического управления
1.2. Обобщенная структурная схема сау
2. Математическое описание линейных сау
2.1. Составление и линеаризация дифференциальных уравнений сау
Основные свойства (теоремы) преобразования Лапласа
Изображения по Лапласу типовых сигналов
2.3. Временные и частотные характеристики звеньев и систем
2.4. Элементарные звенья систем автоматического управления
Пропорциональное (усилительное, безинерционное, масштабирующее) звено
Идеальное дифференцирующее звено
Апериодическое звено первого порядка
Реальное дифференцирующее звено
Инерционное звено второго порядка
Интегро-дифференцирующее звено
Пропорционально-интегральный регулятор (пи-регулятор)
2.5. Неминимально-фазовые звенья
2.6. Эквивалентные преобразования структурных схем линейных сау
2.7. Передаточные функции многоконтурных систем
3. Анализ устойчивости линейныхсау
3.1.Понятие устойчивости линейных систем
3.2.Алгебраический критерий устойчивости Гурвица
3.3.Частотные критерии устойчивости Михайлова и Найквиста
3.5.Оценка устойчивости по логарифмическим амплитудно- и фазо-частотным характеристикам
3.6.Устойчивость систем с запаздыванием
4. Качество динамических характеристик сау
4.1. Показатели качества процесса регулирования
4.2. Частотные критерии качества
4.3. Корневые критерии качества
4.4. Интегральные критерии качества
5.1. Стационарные режимы сау. Передаточные функции статических и астатических систем
5.2. Коэффициенты ошибки системы
5.3. Системы комбинированного управления
6. Анализ сау в пространстве состояния
6.1. Основные положения метода переменных состояния
6.2. Способы построения схем переменных состояния
Метод прямого программирования
Метод параллельного программирования
Метод последовательного программирования
6.3. Решение уравнений состояния линейных стационарных сау. Вычисление фундаментальной матрицы
Последовательные корректирующие звенья
Параллельные корректирующие звенья
7.2. Частотный метод синтеза корректирующих устройств
Построение лах в низкочастотном диапазоне
Построение лах в среднечастотном диапазоне
Зависимость колебательности от значений hи h1
Построение лах в высокочастотном диапазоне
7.3. Последовательные корректирующие устройства
7.4. Параллельные корректирующие устройства
7.5. Техническая реализация корректирующих звеньев
Пассивные четырехполюсники постоянного тока
Пассивные корректирующие четырехполюсники
Активные корректирующие звенья
Активные четырехполюсники постоянного тока
8. Нелинейные системы автоматического управления
8.1. Особенности нелинейных систем и методы их анализа
8.2. Исследование нелинейных систем на фазовой плоскости
8.3. Метод гармонической линеаризации нелинейных звеньев
Коэффициенты гармонической линеаризации типовых нелинейностей
8.5. Методы определения параметров автоколебаний
Задание для расчета линейной caу
Варианты задания для расчета линейной сау
Варианты передаточных функций линейной сау
Задание для расчета нелинейной сау
Варианты задания для расчета нелинейной сау
Варианты структурных схем нелинейных систем Варианты статических характеристик нелинейного элемента
или
![]() .
(8.32)
.
(8.32)
Решение
уравнения (8.32) относительно частоты и
амплитуды автоколебаний можно получить
графически. Для этого на комплексной
плоскости необходимо, изменяя частоту
![]() от 0 до
от 0 до![]() ,
построить годограф АФХ линейной части
системы
,
построить годограф АФХ линейной части
системы![]() и, изменяя амплитудуА
от 0 до
и, изменяя амплитудуА
от 0 до
![]() ,
построить годограф обратной характеристики
нелинейной части
,
построить годограф обратной характеристики
нелинейной части![]() ,
взятый с знаком «минус». Если эти
годографы не пересекаются, то режим
автоколебаний в исследуемой системе
не существует (рис. 8.18, б).
,
взятый с знаком «минус». Если эти
годографы не пересекаются, то режим
автоколебаний в исследуемой системе
не существует (рис. 8.18, б).
П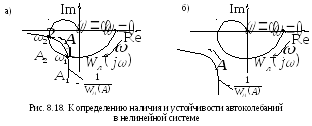 ри
пересечении годографов (рис. 8.18, а) в
системе возникают автоколебания, частота
и амплитуда которых определяются
значениями
ри
пересечении годографов (рис. 8.18, а) в
системе возникают автоколебания, частота
и амплитуда которых определяются
значениями![]() и
и![]() в точке пересечения.
в точке пересечения.
Если
![]() и -
и -![]() пересекаются в нескольких точках (рис.
8.18, а), то это свидетельствует о наличии
в системе нескольких предельных циклов.
При этом колебания в системе могут быть
устойчивыми и неустойчивыми.
пересекаются в нескольких точках (рис.
8.18, а), то это свидетельствует о наличии
в системе нескольких предельных циклов.
При этом колебания в системе могут быть
устойчивыми и неустойчивыми.
Устойчивость
автоколебательного режима оценивается
следующим образом. Режим автоколебаний
устойчив, если точка на годографе
нелинейной части
![]() ,
соответствующая амплитуде большей по
сравнению со значением в точке пересечения
годографов, не охватывается годографом
частотной характеристики линейной
части системы. В противном случае
автоколебательный режим неустойчив.
,
соответствующая амплитуде большей по
сравнению со значением в точке пересечения
годографов, не охватывается годографом
частотной характеристики линейной
части системы. В противном случае
автоколебательный режим неустойчив.
На
рис. 8.18, а годографы пересекаются в
точках 1 и 2. Точка 1
определяет
неустойчивый режим автоколебаний, так
как точка годографа
![]() ,
соответствующая увеличенной амплитуде,
охватывается годографом частотной
характеристики линейной части системы.
Точке 2 соответствует устойчивый режим
автоколебаний, амплитуда которых
определяется по годографу
,
соответствующая увеличенной амплитуде,
охватывается годографом частотной
характеристики линейной части системы.
Точке 2 соответствует устойчивый режим
автоколебаний, амплитуда которых
определяется по годографу![]() а частота – по годографу
а частота – по годографу![]() .
.
В качестве примера оценим устойчивость автоколебаний в двух нелинейных системах. Будем полагать, что передаточные функции линейных частей этих систем совпадают и равны:
![]() ,
,
но входящие в них их нелинейные элементы различны. Пусть в первую систему включен нелинейный элемент «идеальное реле», описываемый системой (8.14), а во вторую – нелинейный элемент со статической характеристикой «кубическая парабола». Воспользовавшись данными таблицы 8.1, получим:
![]()
![]() и
и
![]() –
–![]() .
.
Н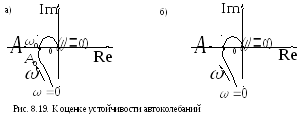 а
рис. 8.19 изображены годографы
а
рис. 8.19 изображены годографы![]() этих систем совместно с годографом АФХ
линейной части системы
этих систем совместно с годографом АФХ
линейной части системы![]() .
На основании изложенного можно утверждать,
что в первой системе возникают устойчивые
автоколебания с частотой
.
На основании изложенного можно утверждать,
что в первой системе возникают устойчивые
автоколебания с частотой![]() и амплитудой
и амплитудой![]() ,
а во второй системе автоколебания
неустойчивые.
,
а во второй системе автоколебания
неустойчивые.
Вопросы для самопроверки
Сформулируйте принцип суперпозиции.
Назовите несколько причин, обуславливающих нелинейность САУ.
Перечислите методы, позволяющие решать задачи анализа и синтеза нелинейных систем.
С чем связано ограничение на использование фазовой плоскости для описания динамики нелинейных систем?
Что называется фазовой траекторией?
Назовите общие закономерности, которым удовлетворяют фазовые траектории нелинейных систем.
Перечислите типы особых точек на фазовой траектории.
Что называется предельным циклом на фазовой траектории?
С чем связано ограничение метода гармонической линеаризации?
Как могут быть определены параметры автоколебаний и их устойчивость?
Курсовая работа
Цель курсовой работы – закрепить теоретический материал и освоить методику анализа САУ.
В рамках курсовой работы не ставится задача проектирования CAУ для конкретного технологического процесса, так как подобные задачи решаются в последующих курсах специальности. В выполняемой курсовой работе математическое описание и структура системы заданы. Требуется, используя методы теории управления, обеспечить необходимые статические и динамические показатели качества регулирования системы путем введения в нее корректирующих звеньев.
Приведенные методические рекомендации по решению основных задач, решаемых в рамках курсовой работы, но они не являются обязательными. Можно выбрать другие обоснованные методы их решения. Курсовая работа включает в себя два раздела: расчет линейной и нелинейной систем автоматического регулирования.
Курсовая работа представляется к проверке в виде расчетно-пояснительной записки, содержащей вариант задания, расчетные формулы и соотношения, список использованной литературы, на которую должны быть сделаны ссылки в тексте, расчеты и необходимые пояснения к ним, выводы на основании полученных результатов.
После проверки курсовой работы преподавателем, необходимо устранить замечания (если это требуется) и защитить её. Во время защиты следует обосновать принятые решения и полученные результаты, объяснить формулы, характеристики и графики, знать теоретические разделы курса, использованные в работе.
Номер варианта задания равен сумме трех последних цифр учебного шифра студенческого билета.
Задание для расчета линейной caу
Дана структурная схема линейной САУ
Проанализировать устойчивость замкнутой системы, используя прямой метод оценки устойчивости и произвольно выбранный критерий устойчивости.
Провести синтез последовательного и параллельного корректирующих звеньев, обеспечивающих следующие показатели качества процесса регулирования в скорректированной системе:
a) перерегулирование σ ≤ 25 %;
б) длительность переходного процесса, не превышающую значения tрег, в соответствие с вариантом задания;
в) точность скорректированной системы должна быть не ниже точности нескорректированной САУ.
Р
 ассчитать
точность скорректированной системы
по управляющему и возмущающему
воздействиям в установившемся режиме.
ассчитать
точность скорректированной системы
по управляющему и возмущающему
воздействиям в установившемся режиме.
4. Определить критическое время запаздывания, при котором скорректированная система будет находиться на границе устойчивости.
Варианты задания для расчета линейной сау
|
Вариант задания |
Варианты W(p |
|
|
|
|
|
|
|
|
ξ |
tр |
|
0 |
1 |
10 |
1 |
1 |
5 |
0,1 |
0,025 |
0,002 |
0,001 |
- |
0,15 |
|
1 |
2 |
17 |
1 |
2 |
4,5 |
0,225 |
0,002 |
- |
0,001 |
0,8 |
0,1 |
|
2 |
3 |
1 |
2 |
1 |
5 |
- |
0,0001 |
0,5 |
0,0001 |
- |
0,5 |
|
3 |
4 |
5 |
3 |
3 |
2 |
- |
0,175 |
0,001 |
0,002 |
0,8 |
0,1 |
|
4 |
5 |
4 |
2 |
5 |
1 |
0,001 |
0,07 |
0,001 |
- |
- |
0,4 |
|
5 |
6 |
4 |
2 |
1 |
5 |
0,007 |
0,125 |
- |
0,0015 |
0,8 |
0,3 |
|
6 |
7 |
25 |
2 |
4 |
2 |
- |
0,0025 |
0,05 |
1,2 |
0,8 |
0,3 |
|
7 |
1 |
4 |
3 |
2 |
9 |
0,5 |
0,07 |
0,003 |
0,001 |
- |
0,2 |
|
8 |
2 |
10 |
2 |
10 |
2 |
1,2 |
0,0025 |
- |
0,05 |
0,8 |
0,3 |
|
9 |
3 |
2 |
2,5 |
2 |
1 |
- |
0,002 |
0,2 |
0,002 |
- |
0,3 |
|
10 |
4 |
2 |
5 |
5 |
2 |
- |
0,125 |
0,001 |
0,002 |
0,8 |
0,1 |
|
11 |
5 |
2 |
1 |
0,5 |
5 |
0,001 |
0,1 |
0,001 |
- |
- |
0,8 |
|
12 |
6 |
3 |
5 |
3 |
3 |
0,001 |
0,2 |
- |
0,0025 |
0,8 |
0,1 |
|
13 |
7 |
1 |
15 |
9 |
1 |
- |
0,0025 |
0,001 |
0,2 |
0,8 |
0,1 |
|
14 |
1 |
30 |
2 |
1 |
5 |
1 |
0,13 |
0,006 |
0,001 |
- |
0,3 |
|
15 |
2 |
1 |
0,5 |
1 |
0,5 |
1 |
0,001 |
- |
0,004 |
0,8 |
0,5 |
|
16 |
3 |
2,5 |
2 |
1 |
3 |
- |
0,001 |
0,3 |
0,001 |
- |
0,3 |
|
17 |
4 |
0,2 |
0,2 |
1 |
1 |
- |
0,65 |
0,005 |
0,001 |
0,8 |
0,3 |
|
18 |
5 |
2,5 |
2 |
0,4 |
5 |
0,001 |
0,9 |
0,001 |
- |
- |
1,5 |
|
19 |
6 |
1 |
3 |
17 |
3 |
0,005 |
0,5 |
- |
0,0025 |
0,8 |
0,5 |
|
20 |
7 |
9 |
1 |
2 |
5 |
- |
0,002 |
0,001 |
0,15 |
0,8 |
0,1 |
|
21 |
1 |
5 |
2 |
1 |
5 |
0,38 |
0,135 |
0,005 |
0,001 |
- |
0,3 |
|
22 |
2 |
10 |
7 |
2 |
1 |
0,25 |
0,001 |
- |
0,004 |
0,8 |
0,3 |
|
23 |
3 |
2 |
3 |
2,5 |
1 |
- |
0,001 |
0,1 |
0,001 |
- |
0,6 |
|
24 |
4 |
2 |
5 |
3 |
1 |
- |
0,005 |
12,5 |
0,001 |
0,8 |
0,3 |
|
25 |
5 |
2 |
2 |
3,5 |
1 |
0,001 |
1 |
0,001 |
- |
- |
1,5 |
|
26 |
6 |
2 |
2 |
2 |
5 |
0,12 |
0,008 |
- |
0,0015 |
0,8 |
0,3 |
|
27 |
7 |
9 |
1 |
1 |
17 |
- |
0,002 |
0,001 |
0,2 |
0,8 |
0,1 |