Файл: Г.М. Гринфельд ТЕОРИЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ уч. пособие.doc
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 29.07.2024
Просмотров: 621
Скачиваний: 3
СОДЕРЖАНИЕ
1. ОсновНые понятия и определения теории автоматического управления
1.1. Краткие сведения по истории развития систем автоматического управления
1.2. Обобщенная структурная схема сау
2. Математическое описание линейных сау
2.1. Составление и линеаризация дифференциальных уравнений сау
Основные свойства (теоремы) преобразования Лапласа
Изображения по Лапласу типовых сигналов
2.3. Временные и частотные характеристики звеньев и систем
2.4. Элементарные звенья систем автоматического управления
Пропорциональное (усилительное, безинерционное, масштабирующее) звено
Идеальное дифференцирующее звено
Апериодическое звено первого порядка
Реальное дифференцирующее звено
Инерционное звено второго порядка
Интегро-дифференцирующее звено
Пропорционально-интегральный регулятор (пи-регулятор)
2.5. Неминимально-фазовые звенья
2.6. Эквивалентные преобразования структурных схем линейных сау
2.7. Передаточные функции многоконтурных систем
3. Анализ устойчивости линейныхсау
3.1.Понятие устойчивости линейных систем
3.2.Алгебраический критерий устойчивости Гурвица
3.3.Частотные критерии устойчивости Михайлова и Найквиста
3.5.Оценка устойчивости по логарифмическим амплитудно- и фазо-частотным характеристикам
3.6.Устойчивость систем с запаздыванием
4. Качество динамических характеристик сау
4.1. Показатели качества процесса регулирования
4.2. Частотные критерии качества
4.3. Корневые критерии качества
4.4. Интегральные критерии качества
5.1. Стационарные режимы сау. Передаточные функции статических и астатических систем
5.2. Коэффициенты ошибки системы
5.3. Системы комбинированного управления
6. Анализ сау в пространстве состояния
6.1. Основные положения метода переменных состояния
6.2. Способы построения схем переменных состояния
Метод прямого программирования
Метод параллельного программирования
Метод последовательного программирования
6.3. Решение уравнений состояния линейных стационарных сау. Вычисление фундаментальной матрицы
Последовательные корректирующие звенья
Параллельные корректирующие звенья
7.2. Частотный метод синтеза корректирующих устройств
Построение лах в низкочастотном диапазоне
Построение лах в среднечастотном диапазоне
Зависимость колебательности от значений hи h1
Построение лах в высокочастотном диапазоне
7.3. Последовательные корректирующие устройства
7.4. Параллельные корректирующие устройства
7.5. Техническая реализация корректирующих звеньев
Пассивные четырехполюсники постоянного тока
Пассивные корректирующие четырехполюсники
Активные корректирующие звенья
Активные четырехполюсники постоянного тока
8. Нелинейные системы автоматического управления
8.1. Особенности нелинейных систем и методы их анализа
8.2. Исследование нелинейных систем на фазовой плоскости
8.3. Метод гармонической линеаризации нелинейных звеньев
Коэффициенты гармонической линеаризации типовых нелинейностей
8.5. Методы определения параметров автоколебаний
Задание для расчета линейной caу
Варианты задания для расчета линейной сау
Варианты передаточных функций линейной сау
Задание для расчета нелинейной сау
Варианты задания для расчета нелинейной сау
Варианты структурных схем нелинейных систем Варианты статических характеристик нелинейного элемента
Варианты передаточных функций линейной сау
|
Варианты W(p) |
|
|
|
|
|
1
|
|
|
|
|
|
2
|
|
|
|
|
|
3
|
|
|
|
|
|
4
|
|
|
|
|
|
5
|
|
|
|
|
|
6 |
|
|
|
|
|
7 |
|
|
|
|
Задание для расчета нелинейной сау
Исследовать динамические режимы системы методом фазовой плоскости для заданной статической характеристики нелинейного элемента (НЭ).
Построить переходный процесс по полученной фазовой траектории.
Определить наличие автоколебаний в системе, оценить их устойчивость и рассчитать параметры.
Варианты задания для расчета нелинейной сау
|
Вариант задания |
Варианты структуры и нелинейного элемента |
|
|
|
|
|
h |
a |
b |
|
0 |
1 |
2 |
- |
- |
0,8 |
0,4 |
8 |
5 |
- |
|
1 |
2 |
5 |
2 |
6 |
- |
- |
1 |
1 |
- |
|
2 |
3 |
25 |
2 |
5 |
1 |
- |
1 |
1 |
2 |
|
3 |
1 |
3 |
- |
- |
0,7 |
0,8 |
4 |
3 |
- |
|
4 |
2 |
2 |
5 |
5 |
- |
- |
10 |
10 |
- |
|
5 |
3 |
6 |
5 |
2 |
4 |
- |
10 |
10 |
20 |
|
6 |
1 |
8 |
- |
- |
1 |
0,8 |
6 |
10 |
- |
|
7 |
2 |
1 |
10 |
2,5 |
- |
- |
10 |
10 |
- |
|
8 |
3 |
5 |
2 |
6 |
2 |
- |
15 |
15 |
30 |
|
9 |
1 |
2 |
- |
- |
1 |
0,8 |
5 |
5 |
- |
|
10 |
2 |
10 |
2 |
2 |
- |
- |
5 |
5 |
- |
|
11 |
3 |
1 |
5 |
2 |
6 |
- |
30 |
15 |
30 |
|
12 |
1 |
1 |
- |
- |
1 |
0,6 |
10 |
5 |
- |
|
13 |
2 |
4 |
5 |
5 |
- |
- |
5 |
5 |
- |
|
14 |
3 |
3 |
5 |
1 |
5 |
- |
25 |
10 |
30 |
|
15 |
1 |
0,5 |
- |
- |
0,8 |
0,6 |
10 |
20 |
- |
|
16 |
2 |
2 |
10 |
2,5 |
- |
- |
10 |
10 |
- |
|
17 |
3 |
8 |
2 |
2 |
4 |
- |
25 |
15 |
30 |
|
18 |
1 |
5 |
- |
- |
0,5 |
0,8 |
10 |
10 |
- |
|
19 |
2 |
4 |
5 |
4 |
- |
- |
10 |
10 |
- |
|
20 |
3 |
3 |
4 |
5 |
2 |
- |
10 |
15 |
25 |
|
21 |
1 |
5 |
- |
- |
1 |
0,15 |
20 |
10 |
- |
|
22 |
2 |
2 |
10 |
1 |
- |
- |
15 |
15 |
- |
|
23 |
3 |
3 |
5 |
2 |
5 |
- |
15 |
15 |
30 |
|
24 |
1 |
10 |
- |
- |
1 |
0,2 |
10 |
10 |
- |
|
25 |
2 |
4 |
5 |
5 |
- |
- |
10 |
10 |
- |
|
26 |
3 |
6 |
2 |
6 |
1 |
- |
10 |
25 |
35 |
|
27 |
1 |
5 |
- |
- |
1,5 |
0,3 |
20 |
10 |
- |
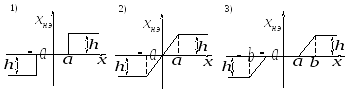
Варианты структурных схем нелинейных систем Варианты статических характеристик нелинейного элемента
Экзаменационные вопросы
Классификация систем автоматического управления.
Принципы линеаризации систем автоматического управления.
Использование дифференциальных и операторных уравнений при описании систем автоматического управления. Основные свойства преобразования Лапласа.
Передаточные функции систем автоматического управления.
Временные характеристики систем автоматического управления.
Частотные характеристики систем автоматического управления.
Характеристики пропорционального звена
Характеристики идеального дифференцирующего звена.
Характеристики апериодического звена первого порядка.
Характеристики реального дифференцирующего звена.
Характеристики инерционного звена второго порядка.
Характеристики звена чистого запаздывания.
Характеристики интегро-дифференцирующего звена.
Характеристики пропорционально-интегрирующего звена.
Эквивалентные преобразования структурных схем линейных систем автоматического управления.
Понятие устойчивости линейных систем автоматического управления. Необходимое и достаточное условия устойчивости. Прямой метод оценки устойчивости.
Алгебраический критерий устойчивости Гурвица.
Частотный критерий устойчивости Михайлова. Принцип аргумента.
Частотный критерий устойчивости Найквиста.
Устойчивость систем с запаздыванием.
Оценка качества процесса регулирования по переходной характеристике системы.
Частотные критерии качества.
Корневые критерии качества.
Интегральные критерии качества.
Оценка точности систем автоматического управления. Статические и астатические системы.
Коэффициенты ошибки системы.
Системы комбинированного управления.
Типы корректирующих звеньев в системах автоматического управления.
Частотный метод синтеза корректирующих устройств.
Последовательные корректирующие устройства..
Параллельные корректирующие устройства.
Техническая реализация корректирующих устройств.
Особенности нелинейных систем и методы их анализа.
Исследование нелинейных систем на фазовой плоскости.
Метод гармонической линеаризации нелинейных звеньев.
Методы определения параметров автоколебаний.