Файл: Г.М. Гринфельд ТЕОРИЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ уч. пособие.doc
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 29.07.2024
Просмотров: 589
Скачиваний: 3
СОДЕРЖАНИЕ
1. ОсновНые понятия и определения теории автоматического управления
1.1. Краткие сведения по истории развития систем автоматического управления
1.2. Обобщенная структурная схема сау
2. Математическое описание линейных сау
2.1. Составление и линеаризация дифференциальных уравнений сау
Основные свойства (теоремы) преобразования Лапласа
Изображения по Лапласу типовых сигналов
2.3. Временные и частотные характеристики звеньев и систем
2.4. Элементарные звенья систем автоматического управления
Пропорциональное (усилительное, безинерционное, масштабирующее) звено
Идеальное дифференцирующее звено
Апериодическое звено первого порядка
Реальное дифференцирующее звено
Инерционное звено второго порядка
Интегро-дифференцирующее звено
Пропорционально-интегральный регулятор (пи-регулятор)
2.5. Неминимально-фазовые звенья
2.6. Эквивалентные преобразования структурных схем линейных сау
2.7. Передаточные функции многоконтурных систем
3. Анализ устойчивости линейныхсау
3.1.Понятие устойчивости линейных систем
3.2.Алгебраический критерий устойчивости Гурвица
3.3.Частотные критерии устойчивости Михайлова и Найквиста
3.5.Оценка устойчивости по логарифмическим амплитудно- и фазо-частотным характеристикам
3.6.Устойчивость систем с запаздыванием
4. Качество динамических характеристик сау
4.1. Показатели качества процесса регулирования
4.2. Частотные критерии качества
4.3. Корневые критерии качества
4.4. Интегральные критерии качества
5.1. Стационарные режимы сау. Передаточные функции статических и астатических систем
5.2. Коэффициенты ошибки системы
5.3. Системы комбинированного управления
6. Анализ сау в пространстве состояния
6.1. Основные положения метода переменных состояния
6.2. Способы построения схем переменных состояния
Метод прямого программирования
Метод параллельного программирования
Метод последовательного программирования
6.3. Решение уравнений состояния линейных стационарных сау. Вычисление фундаментальной матрицы
Последовательные корректирующие звенья
Параллельные корректирующие звенья
7.2. Частотный метод синтеза корректирующих устройств
Построение лах в низкочастотном диапазоне
Построение лах в среднечастотном диапазоне
Зависимость колебательности от значений hи h1
Построение лах в высокочастотном диапазоне
7.3. Последовательные корректирующие устройства
7.4. Параллельные корректирующие устройства
7.5. Техническая реализация корректирующих звеньев
Пассивные четырехполюсники постоянного тока
Пассивные корректирующие четырехполюсники
Активные корректирующие звенья
Активные четырехполюсники постоянного тока
8. Нелинейные системы автоматического управления
8.1. Особенности нелинейных систем и методы их анализа
8.2. Исследование нелинейных систем на фазовой плоскости
8.3. Метод гармонической линеаризации нелинейных звеньев
Коэффициенты гармонической линеаризации типовых нелинейностей
8.5. Методы определения параметров автоколебаний
Задание для расчета линейной caу
Варианты задания для расчета линейной сау
Варианты передаточных функций линейной сау
Задание для расчета нелинейной сау
Варианты задания для расчета нелинейной сау
Варианты структурных схем нелинейных систем Варианты статических характеристик нелинейного элемента
Построение лах в среднечастотном диапазоне
На
среднечастотном участке желаемая ЛАХ
в наибольшей степени зависит от требования
к динамическим показателям качества
регулирования, например, показателю
колебательности, времени регулирования
и перерегулирование. На этом участке
находится частота среза
![]() и
определяется запас устойчивости по
фазе.
и
определяется запас устойчивости по
фазе.
Если качество регулирования системы оценивается по величине перерегулирования и времени регулирования, то, задавшись максимально допустимыми значения указанных показателей σ и tp, следует воспользоваться номограммой (рис. 7.3). По заданной величине перерегулирования (например, σ = 20 %), определяется величина tp:
![]()
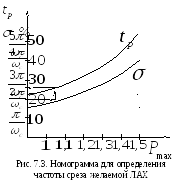 ,
,
где
![]() – частота среза желаемой ЛАХ.
– частота среза желаемой ЛАХ.
Поскольку допустимое значение tp задано, то можно вычислить необходимую частоту среза:
![]() .
.
Вид
желаемой ЛАХ в среднечастотном диапазоне
должен гарантировать необходимый запас
устойчивости системы по фазе, что в
максимальной степени обеспечивается,
когда
![]() в
районе частоты среза имеет достаточно
протяженный участок с наклоном -20
дБ/дек.
в
районе частоты среза имеет достаточно
протяженный участок с наклоном -20
дБ/дек.
Типы четырех возможных ЛАХ, удовлетворяющих этому условию, приведены в таблице 7.1. ЛАХ типа А и С соответствуют статическим системам, а ЛАХ типа B и D-астатическим системам с астатизмом первого порядка.
Таблица 7.1
|
Тип ЛАХ |
Наклоны асимптот, дБ/дек |
|||
|
Низкочастотный участок |
Сопряженный участок |
Среднечастотный участок |
Высокочастотный участок |
|
|
А |
0 |
- 40 |
- 20 |
- 40 |
|
B |
- 20 |
- 40 |
- 20 |
- 40 |
|
C |
0 |
- 40 |
- 20 |
- 60 |
|
D |
- 20 |
- 40 |
- 20 |
- 60 |
Типовые ЛАХ
Для
ЛАХ (рис. 7.4) примем следующие обозначения:
![]() – протяженность среднечастотного
участка
– протяженность среднечастотного
участка
![]() ;
;
![]() - протяженность участка желаемой ЛАХ,
по которому сопрягаются низкочастотный
и среднечастотный участки
- протяженность участка желаемой ЛАХ,
по которому сопрягаются низкочастотный
и среднечастотный участки
![]() .
.
Имеется
несколько рекомендаций по выбору частот
![]() и
и![]() .
Например, выбирают
.
Например, выбирают![]() и
и![]() /
/![]() .
Наиболее простой является рекомендация,
согласно которой интервалы частот (
.
Наиболее простой является рекомендация,
согласно которой интервалы частот (![]() –
–![]() )
и (
)
и (![]() –
–![]() )
принимают равными 0,5…0,9 декады. Еще один
подход к выбору протяженности
среднечастотного участка накладывает
ограничение на абсолютную величину
)
принимают равными 0,5…0,9 декады. Еще один
подход к выбору протяженности
среднечастотного участка накладывает
ограничение на абсолютную величину![]() и
и![]() ,
которая должны быть не ниже значений,
определенных по специальной номограмме
(обычно эти значения находятся в пределах
от 12 до 16 дБ).
,
которая должны быть не ниже значений,
определенных по специальной номограмме
(обычно эти значения находятся в пределах
от 12 до 16 дБ).
Е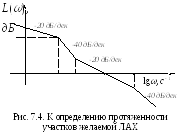 сли
качество регулирования системы
оценивается по величине показателя
колебательности
сли
качество регулирования системы
оценивается по величине показателя
колебательности![]() ,
то для определения протяженности
участков
,
то для определения протяженности
участков![]() и
и![]() можно воспользоваться данными,
приведенными в таблице 7.2.
можно воспользоваться данными,
приведенными в таблице 7.2.
Выбор
граничных частот среднечастотного
участка согласно приведенным рекомендациям
дает несколько различные результаты.
При окончательном их выборе следует
исходить из того, что чем шире интервал
частот (![]() ;
;![]() ),
тем лучше будет переходный процесс.
Однако практическая реализация желаемой
ЛАХ при этом усложняется и, кроме того,
излишняя протяженность среднечастотного
участка снижает динамичность системы.
),
тем лучше будет переходный процесс.
Однако практическая реализация желаемой
ЛАХ при этом усложняется и, кроме того,
излишняя протяженность среднечастотного
участка снижает динамичность системы.
Таблица 7.2
Зависимость колебательности от значений hи h1
|
М
|
h
|
h1 |
|||
|
ЛАХ типа А |
ЛАХ типа B |
ЛАХ типа C |
ЛАХ типа D |
||
|
1,1 |
21,00 |
5,5 |
2,05 |
5,5 |
1,9 |
|
1,3 |
7,70 |
8,9 |
3,85 |
8,9 |
2,8 |
|
1,5 |
7,00 |
12,75 |
4,8 |
12,5 |
3,6 |
|
2,0 |
3,00 |
28,0 |
10,0 |
26,6 |
6,1 |
|
2,.5 |
2,33 |
42,0 |
14,1 |
40,0 |
7,2 |
Построение лах в высокочастотном диапазоне
В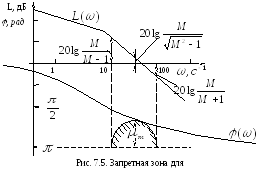 ид
желаемой ЛАХ в высокочастотном диапазоне
определяет, например, такой показатель,
как помехоустойчивость системы, но на
качество регулирования поведение
ид
желаемой ЛАХ в высокочастотном диапазоне
определяет, например, такой показатель,
как помехоустойчивость системы, но на
качество регулирования поведение
![]() в этой частотной области вид ЛАХ влияет
в незначительной степени. Поэтому на
участке высоких частот с целью упрощения
корректирующего звена допустимо
совпадение
наклонов асимптот желаемой ЛАХ и ЛАХ
исходной нескорректированной системы.
в этой частотной области вид ЛАХ влияет
в незначительной степени. Поэтому на
участке высоких частот с целью упрощения
корректирующего звена допустимо
совпадение
наклонов асимптот желаемой ЛАХ и ЛАХ
исходной нескорректированной системы.
З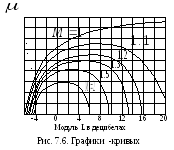 авершив
построение желаемой ЛАХ разомкнутой
системы, необходимо определить
соответствующую ей фазо-частотную
характеристику
авершив
построение желаемой ЛАХ разомкнутой
системы, необходимо определить
соответствующую ей фазо-частотную
характеристику![]() ,
и проверить наличие необходимого запаса
устойчивости системы по амплитуде
,
и проверить наличие необходимого запаса
устойчивости системы по амплитуде![]() и по фазе
и по фазе![]() .
В случае, когда при коррекции системы
указано требуемое значение показателя
колебательности
.
В случае, когда при коррекции системы
указано требуемое значение показателя
колебательности
![]() ,
необходимо построить запретную зону
для
,
необходимо построить запретную зону
для
![]() (рис. 7.5).
(рис. 7.5).
Границы
запретной зоны, называемые
![]() -кривыми,
для различных значений
-кривыми,
для различных значений
![]() приведены
на рис. 7.6 . Запретная зона строится в
частотном диапазоне, в котором
приведены
на рис. 7.6 . Запретная зона строится в
частотном диапазоне, в котором
![]() <
<
![]() <
<![]() .
.
Максимальное
значение запаса по фазе
![]() соответствует частоте, при которой
соответствует частоте, при которой
![]() =
=
![]() .
Величина
запретной зоны возрастает при уменьшении
.
Величина
запретной зоны возрастает при уменьшении
![]() .Если
фазо-частотная характеристика
.Если
фазо-частотная характеристика
![]() заходит взапретную
зону, то фактическая величина показателя
колебательности
заходит взапретную
зону, то фактическая величина показателя
колебательности
![]() превышает
максимально допустимое значение.
превышает
максимально допустимое значение.
7.3. Последовательные корректирующие устройства
В соответствии с выражением (7.1) АФХ разомкнутой скорректированной системы равна:
![]() ,
(7.5)
,
(7.5)
а логарифмические амплитудно- и фазо-частотные характеристики соответственно:
![]() ;
(7.6)
;
(7.6)
![]() .
(7.7)
.
(7.7)
Из выражений (7.6) и (7.7) следует, что амплитудно- и фазо-частотные характеристики последовательно корректирующего звена равны:
![]() ;
(7.8)
;
(7.8)
![]() .
(7.9)
.
(7.9)
В
качестве примера на рис.7.7 приведены
логарифмические частотные характеристики
разомкнутой нескорректированной
системы (
![]() и
и![]() ).
На этом же рисунке представлена желаемая
ЛАХ скорректированной системы
).
На этом же рисунке представлена желаемая
ЛАХ скорректированной системы![]() и
соответствующая ей фазо-частотная
характеристика
и
соответствующая ей фазо-частотная
характеристика![]() .
В соответствии с выражением (7.8), вычитая
из желаемой ЛАХ характеристику
исходной системы
.
В соответствии с выражением (7.8), вычитая
из желаемой ЛАХ характеристику
исходной системы![]() ,
получаем ЛАХ корректирующего звена
,
получаем ЛАХ корректирующего звена![]() .
Приведенная на рис.7.7
.
Приведенная на рис.7.7![]() соответствует
интегро-дифференцирующему звену:
соответствует
интегро-дифференцирующему звену: