Файл: Г.М. Гринфельд ТЕОРИЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ уч. пособие.doc
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 29.07.2024
Просмотров: 613
Скачиваний: 3
СОДЕРЖАНИЕ
1. ОсновНые понятия и определения теории автоматического управления
1.1. Краткие сведения по истории развития систем автоматического управления
1.2. Обобщенная структурная схема сау
2. Математическое описание линейных сау
2.1. Составление и линеаризация дифференциальных уравнений сау
Основные свойства (теоремы) преобразования Лапласа
Изображения по Лапласу типовых сигналов
2.3. Временные и частотные характеристики звеньев и систем
2.4. Элементарные звенья систем автоматического управления
Пропорциональное (усилительное, безинерционное, масштабирующее) звено
Идеальное дифференцирующее звено
Апериодическое звено первого порядка
Реальное дифференцирующее звено
Инерционное звено второго порядка
Интегро-дифференцирующее звено
Пропорционально-интегральный регулятор (пи-регулятор)
2.5. Неминимально-фазовые звенья
2.6. Эквивалентные преобразования структурных схем линейных сау
2.7. Передаточные функции многоконтурных систем
3. Анализ устойчивости линейныхсау
3.1.Понятие устойчивости линейных систем
3.2.Алгебраический критерий устойчивости Гурвица
3.3.Частотные критерии устойчивости Михайлова и Найквиста
3.5.Оценка устойчивости по логарифмическим амплитудно- и фазо-частотным характеристикам
3.6.Устойчивость систем с запаздыванием
4. Качество динамических характеристик сау
4.1. Показатели качества процесса регулирования
4.2. Частотные критерии качества
4.3. Корневые критерии качества
4.4. Интегральные критерии качества
5.1. Стационарные режимы сау. Передаточные функции статических и астатических систем
5.2. Коэффициенты ошибки системы
5.3. Системы комбинированного управления
6. Анализ сау в пространстве состояния
6.1. Основные положения метода переменных состояния
6.2. Способы построения схем переменных состояния
Метод прямого программирования
Метод параллельного программирования
Метод последовательного программирования
6.3. Решение уравнений состояния линейных стационарных сау. Вычисление фундаментальной матрицы
Последовательные корректирующие звенья
Параллельные корректирующие звенья
7.2. Частотный метод синтеза корректирующих устройств
Построение лах в низкочастотном диапазоне
Построение лах в среднечастотном диапазоне
Зависимость колебательности от значений hи h1
Построение лах в высокочастотном диапазоне
7.3. Последовательные корректирующие устройства
7.4. Параллельные корректирующие устройства
7.5. Техническая реализация корректирующих звеньев
Пассивные четырехполюсники постоянного тока
Пассивные корректирующие четырехполюсники
Активные корректирующие звенья
Активные четырехполюсники постоянного тока
8. Нелинейные системы автоматического управления
8.1. Особенности нелинейных систем и методы их анализа
8.2. Исследование нелинейных систем на фазовой плоскости
8.3. Метод гармонической линеаризации нелинейных звеньев
Коэффициенты гармонической линеаризации типовых нелинейностей
8.5. Методы определения параметров автоколебаний
Задание для расчета линейной caу
Варианты задания для расчета линейной сау
Варианты передаточных функций линейной сау
Задание для расчета нелинейной сау
Варианты задания для расчета нелинейной сау
Варианты структурных схем нелинейных систем Варианты статических характеристик нелинейного элемента
8.2. Исследование нелинейных систем на фазовой плоскости
Метод фазовой плоскости используется для исследования нелинейных САУ, линейная часть которых с достаточной для решения практических задач точностью может быть описана дифференциальным уравнением второго порядка.
Ф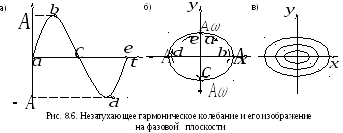 азовой
плоскостью
называется плоскость, на которой
изображается изменение какой-либо
переменной величины
азовой
плоскостью
называется плоскость, на которой
изображается изменение какой-либо
переменной величины
![]() в функции скорости ее изменения:
в функции скорости ее изменения:![]() .
Оси времени на фазовой плоскости нет,
но каждому моменту времени соответствует
определенная точка (изображающая
точка),
абсцисса и ордината которой равны
соответственно значению сигнала и
скорости его изменения в данный момент
времени. При изменении времени изображающая
точка перемещается по определенной
траектории, называемой фазовой
траекторией.
.
Оси времени на фазовой плоскости нет,
но каждому моменту времени соответствует
определенная точка (изображающая
точка),
абсцисса и ордината которой равны
соответственно значению сигнала и
скорости его изменения в данный момент
времени. При изменении времени изображающая
точка перемещается по определенной
траектории, называемой фазовой
траекторией.
Определим
выражение фазовой траектории для сигнала
![]() ,
представляющего собой
незатухающие гармонические колебания
с амплитудой
,
представляющего собой
незатухающие гармонические колебания
с амплитудой
![]() и
частотой
и
частотой![]() (рис. 8.6, а):
(рис. 8.6, а):
![]() .
(8.1)
.
(8.1)
Скорость изменения такого сигнала равна:
![]() .
(8.2)
.
(8.2)
Выражая
из уравнений (8.1) и (8.2)
![]() и
и![]() ,
на основании основного тригонометрического
тождества получим:
,
на основании основного тригонометрического
тождества получим:
![]() .
(8.3)
.
(8.3)
Следовательно,
незатухающие гармонические колебания
изображаются на фазовой плоскости в
виде эллипса (рис. 8.6, б) с полуосями А
и
![]() .
.
При
изменении времени изображающая точка,
будет перемещаться вдоль эллипса по
часовой стрелке с периодом колебания
![]() .
.
Для
различных амплитуд А
при заданной частоте
![]() можно построить семейство таких эллипсов,
вложенных один в другой (рис. 8.6, в).
Совокупность фазовых траекторий
нелинейной системы, соответствующих
различным значения ее параметров или
начальных условий, называетсяфазовой
картиной (фазовым портретом).
можно построить семейство таких эллипсов,
вложенных один в другой (рис. 8.6, в).
Совокупность фазовых траекторий
нелинейной системы, соответствующих
различным значения ее параметров или
начальных условий, называетсяфазовой
картиной (фазовым портретом).
В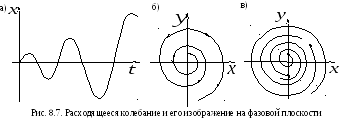
 случае расходящегося колебательного
процесса (рис. 8.7, а) амплитуда колебаний
увеличивается и соответствующая
такому процессу фазовая траектория
будет иметь вид расходящейся
логарифмической спирали (рис. 8.7, б).
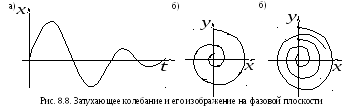
Наоборот, затухающий колебательный
процесс (рис. 8.8, а) на фазовой плоскости
изображается в виде логарифмической
спирали, сходящейся к началу координат
(рис. 8.8, б). Фазовые портреты, соответствующие
различным значениям начальных условий
для таких процессов приведены
соответственно на рис. 8.7, в и рис. 8.8, в.
случае расходящегося колебательного
процесса (рис. 8.7, а) амплитуда колебаний
увеличивается и соответствующая
такому процессу фазовая траектория
будет иметь вид расходящейся
логарифмической спирали (рис. 8.7, б).
Наоборот, затухающий колебательный
процесс (рис. 8.8, а) на фазовой плоскости
изображается в виде логарифмической
спирали, сходящейся к началу координат
(рис. 8.8, б). Фазовые портреты, соответствующие
различным значениям начальных условий
для таких процессов приведены
соответственно на рис. 8.7, в и рис. 8.8, в.
Таким образом, по виду фазовой траектории можно наглядно судить об устойчивости системы.
Возможно
и решение обратной задачи – определение
закона изменения сигнала
![]() по
уравнению фазовой траектории
по
уравнению фазовой траектории![]() .
Пусть, например, фазовая траектория
представляет собой отрезок прямой,
начальная точка (соответствующая моменту
времени
.
Пусть, например, фазовая траектория
представляет собой отрезок прямой,
начальная точка (соответствующая моменту
времени![]() )
которого имеет координаты (
)
которого имеет координаты (![]() ),
а конечная совпадает с началом координат
фазовой плоскости. Очевидно, что уравнение
фазовой траектории:
),
а конечная совпадает с началом координат
фазовой плоскости. Очевидно, что уравнение
фазовой траектории:
![]()
где
![]()
![]() .
.
Н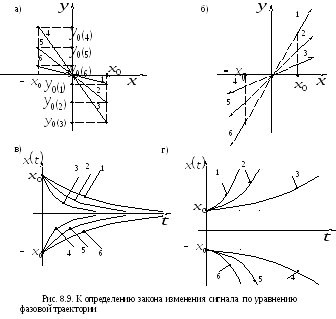 а
рис. 8.9, а приведена совокупность таких
фазовых траекторий, различающихся
значениями абсциссы
а
рис. 8.9, а приведена совокупность таких
фазовых траекторий, различающихся
значениями абсциссы![]() и
ординаты
и
ординаты![]() начальной точки для случая, когда знаки
начальной точки для случая, когда знаки![]() и
и![]() противоположны (
противоположны (![]()
0), а на рис. 8.9, б – когда знаки
0), а на рис. 8.9, б – когда знаки
![]() и
и![]() совпадают (
совпадают (![]()
0).
0).
Так
как
![]() то уравнение фазовой траектории можно
записать в виде:
то уравнение фазовой траектории можно
записать в виде:![]() .
Разделяя переменные, имеем
.
Разделяя переменные, имеем![]() Интегрируя последнее выражение, получим:
Интегрируя последнее выражение, получим:
 =
=
 =
=
![]() .
.
Откуда
![]() и,
следовательно, искомый закон изменения
сигнала:
и,
следовательно, искомый закон изменения
сигнала:
![]() .
.
Совокупность
графиков сигнала![]() ,
соответствующих различным начальнымусловиям
для случая
,
соответствующих различным начальнымусловиям
для случая
![]()
0, представлена на рис. 8.9, в, а для случая
0, представлена на рис. 8.9, в, а для случая
![]()
0 – на рис. 8.9,
г.
0 – на рис. 8.9,
г.
Аналитическое
выражение для закона изменения сигнала
![]() по
уравнению фазовой траектории удается
определить в очень редких случаях. Но
приблизительный график
по
уравнению фазовой траектории удается
определить в очень редких случаях. Но
приблизительный график![]() можно
построить, воспользовавшись следующей
методикой. Необходимо, начиная от
начальной точки (
можно
построить, воспользовавшись следующей
методикой. Необходимо, начиная от
начальной точки (![]() ),
отметить на фазовой траектории (рис.
8.10, а) точки, абсциссы которых отличаются
друг от друга на достаточно малое
постоянное по величине приращение
),
отметить на фазовой траектории (рис.
8.10, а) точки, абсциссы которых отличаются
друг от друга на достаточно малое
постоянное по величине приращение![]() .
При этом время перехода системы от одной
такой точки к достаточно близкой соседней
может быть приближенно определено по
формуле:
.
При этом время перехода системы от одной
такой точки к достаточно близкой соседней
может быть приближенно определено по
формуле:
![]() ,
(8.4)
,
(8.4)
где
![]() – среднее значение скорости изменения
сигнала
– среднее значение скорости изменения
сигнала![]() ,
определяемое как ордината середины
отрезка фазовой траектории между данными
точками. Построение графика
,
определяемое как ордината середины
отрезка фазовой траектории между данными
точками. Построение графика![]() начинается с точки
начинается с точки![]() ,
находящейся на оси ординат (рис. 8.10, б).
,
находящейся на оси ординат (рис. 8.10, б).
К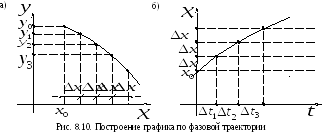 аждая
последующая точка графика отличается
от предыдущей: по оси абсцисс на величину
аждая
последующая точка графика отличается
от предыдущей: по оси абсцисс на величину![]() ,
а по оси времени – на величину
,
а по оси времени – на величину![]() ,
рассчитываемую для каждого перехода
по выражению (8.4).
,
рассчитываемую для каждого перехода
по выражению (8.4).
Рассмотрим общие закономерности, которым удовлетворяют фазовые траектории нелинейных систем.
Поскольку
в верхней полуплоскости фазовой плоскости
![]() ,
то изображающая точка движется вдоль
фазовой траектории в сторону увеличения
,
то изображающая точка движется вдоль
фазовой траектории в сторону увеличения
![]() .
В нижней половине
.
В нижней половине![]() ,
следовательно, изображающая точка
движется вдоль фазовой траектории
в сторону уменьшения
,
следовательно, изображающая точка
движется вдоль фазовой траектории
в сторону уменьшения![]() .
Так как в точках пересечения фазовых
траекторий с осью
.
Так как в точках пересечения фазовых
траекторий с осью![]() производная
производная![]() ,
то фазовые траектории пересекают
ось х
под прямым углом.
,
то фазовые траектории пересекают
ось х
под прямым углом.
Между собой фазовые траектории пересекаются только в особых точках. Особыми точками называют точки, соответствующие состоянию равновесия системы. Особые точки бывают четырех видов: центр, фокус, узел и седло. Центром называется особая точка в начале координат (на рис. 8.6, в). Особая точка в начале координат (см. рис. 8.7, в) является неустойчивым фокусом или устойчивым фокусом (см. рис. 8.8, в).
Н ачало
координат являетсяустойчивым
узлом,
если фазовые траектории входят в него
(см. рис. 8.9, а), и неустойчивым
узлом в
противоположном случае (рис. 8.9, б).
Находящаяся в начале координат особая
точка типа «седло»
всегда
неустойчива, т.е. соответствует
неустойчивому состоянию равновесия
(рис. 8.11, а).
На рис. 8.11,
б особые точки образуют особый
отрезок,
в каждой точке которого возможно
равновесие системы.
ачало
координат являетсяустойчивым
узлом,
если фазовые траектории входят в него
(см. рис. 8.9, а), и неустойчивым
узлом в
противоположном случае (рис. 8.9, б).
Находящаяся в начале координат особая
точка типа «седло»
всегда
неустойчива, т.е. соответствует
неустойчивому состоянию равновесия
(рис. 8.11, а).
На рис. 8.11,
б особые точки образуют особый
отрезок,
в каждой точке которого возможно
равновесие системы.
Незатухающим колебаниям в нелинейной системе на фазовой плоскости соответствуют замкнутые траектории – предельные циклы. Они бывают устойчивыми и неустойчивыми.
Устойчивый предельный цикл описывает на фазовой плоскости режим автоколебаний в системе. Он характерен тем, что фазовые траектории с обеих сторон от устойчивого предельного цикла «наматываются» на него (рис. 8.12, а).
В случае неустойчивого предельного цикла фазовые траектории отдаляются от него с одной или с обеих сторон (рис. 8.12, б). Неустойчивый предельный цикл соответствует неустойчивым колебаниям, которые в реальных системах не существуют. При этом неустойчивый предельный цикл определяет на фазовой плоскости границу, разделяющую различные установившиеся режимы.
Р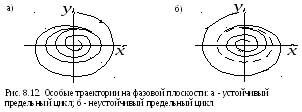 ассмотрим
пример построения фазового портрета
нелинейной САУ (рис. 8.13). Пусть передаточная
функция линейной части системы равна:
ассмотрим
пример построения фазового портрета
нелинейной САУ (рис. 8.13). Пусть передаточная
функция линейной части системы равна:
![]() ,
(8.5)
,
(8.5)
а статическая нелинейная зависимость между входным и выходным сигналом нелинейного элемента:
 (8.6)
(8.6)
Такая статическая зависимость соответствует типовому нелинейному элементу «однозначная релейная характеристика с зоной нечувствительности».
О писание
системы будем осуществлять в ее свободном
движении, т.е. полагать, что
писание
системы будем осуществлять в ее свободном
движении, т.е. полагать, что![]() ,
при этом
,
при этом![]() .
.
Изображение по Лапласу выходного сигнала системы равно:
![]()
![]() .
(8.7)
.
(8.7)
Соответствующее выражению (8.7) операторное уравнение имеет вид:
![]()
или
![]() (8.8)
(8.8)
Выполнив для (8.8) обратное преобразование Лапласа, получим:
![]() .
(8.9)
.
(8.9)
В дальнейшем для упрощения аргумент t опускается.
С
учетом выражений (8.6) и (8.9) можно записать
следующие дифференциальные уравнения,
определяющие переходный процесс в
системе в трех зонах величины
![]() :
: