Файл: Г.М. Гринфельд ТЕОРИЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ уч. пособие.doc
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 29.07.2024
Просмотров: 604
Скачиваний: 3
СОДЕРЖАНИЕ
1. ОсновНые понятия и определения теории автоматического управления
1.1. Краткие сведения по истории развития систем автоматического управления
1.2. Обобщенная структурная схема сау
2. Математическое описание линейных сау
2.1. Составление и линеаризация дифференциальных уравнений сау
Основные свойства (теоремы) преобразования Лапласа
Изображения по Лапласу типовых сигналов
2.3. Временные и частотные характеристики звеньев и систем
2.4. Элементарные звенья систем автоматического управления
Пропорциональное (усилительное, безинерционное, масштабирующее) звено
Идеальное дифференцирующее звено
Апериодическое звено первого порядка
Реальное дифференцирующее звено
Инерционное звено второго порядка
Интегро-дифференцирующее звено
Пропорционально-интегральный регулятор (пи-регулятор)
2.5. Неминимально-фазовые звенья
2.6. Эквивалентные преобразования структурных схем линейных сау
2.7. Передаточные функции многоконтурных систем
3. Анализ устойчивости линейныхсау
3.1.Понятие устойчивости линейных систем
3.2.Алгебраический критерий устойчивости Гурвица
3.3.Частотные критерии устойчивости Михайлова и Найквиста
3.5.Оценка устойчивости по логарифмическим амплитудно- и фазо-частотным характеристикам
3.6.Устойчивость систем с запаздыванием
4. Качество динамических характеристик сау
4.1. Показатели качества процесса регулирования
4.2. Частотные критерии качества
4.3. Корневые критерии качества
4.4. Интегральные критерии качества
5.1. Стационарные режимы сау. Передаточные функции статических и астатических систем
5.2. Коэффициенты ошибки системы
5.3. Системы комбинированного управления
6. Анализ сау в пространстве состояния
6.1. Основные положения метода переменных состояния
6.2. Способы построения схем переменных состояния
Метод прямого программирования
Метод параллельного программирования
Метод последовательного программирования
6.3. Решение уравнений состояния линейных стационарных сау. Вычисление фундаментальной матрицы
Последовательные корректирующие звенья
Параллельные корректирующие звенья
7.2. Частотный метод синтеза корректирующих устройств
Построение лах в низкочастотном диапазоне
Построение лах в среднечастотном диапазоне
Зависимость колебательности от значений hи h1
Построение лах в высокочастотном диапазоне
7.3. Последовательные корректирующие устройства
7.4. Параллельные корректирующие устройства
7.5. Техническая реализация корректирующих звеньев
Пассивные четырехполюсники постоянного тока
Пассивные корректирующие четырехполюсники
Активные корректирующие звенья
Активные четырехполюсники постоянного тока
8. Нелинейные системы автоматического управления
8.1. Особенности нелинейных систем и методы их анализа
8.2. Исследование нелинейных систем на фазовой плоскости
8.3. Метод гармонической линеаризации нелинейных звеньев
Коэффициенты гармонической линеаризации типовых нелинейностей
8.5. Методы определения параметров автоколебаний
Задание для расчета линейной caу
Варианты задания для расчета линейной сау
Варианты передаточных функций линейной сау
Задание для расчета нелинейной сау
Варианты задания для расчета нелинейной сау
Варианты структурных схем нелинейных систем Варианты статических характеристик нелинейного элемента
2.3. Временные и частотные характеристики звеньев и систем
Динамические свойства линейных звеньев и систем автоматического управления в целом могут быть описаны дифференциальными уравнениями и передаточными функциями, а также с помощью временных и частотных характеристик. Временная характеристика представляет собой функцию времени, описывающую выходной сигнал звена (или системы) при подаче на вход звена определенного тестирующего сигнала. Частотные характеристики описывают установившиеся вынужденные колебания на выходе звена, вызванные гармоническим воздействием на входе.
У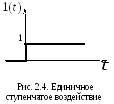 казанные
характеристики могут быть сняты
экспериментально или построены по
уравнению звена. Имеется и обратная
возможность – по экспериментально
полученным характеристикам составить
уравнение звена. Кроме того, с помощью
этих характеристик можно определить
реакцию звена на любое возмущение
произвольного вида. Переходные и
частотные характеристики однозначно
связаны с дифференциальным уравнением
звена и его передаточной функцией и
наряду с ними являются исчерпывающим
описанием динамических свойств звена.
казанные
характеристики могут быть сняты
экспериментально или построены по
уравнению звена. Имеется и обратная
возможность – по экспериментально
полученным характеристикам составить
уравнение звена. Кроме того, с помощью
этих характеристик можно определить
реакцию звена на любое возмущение
произвольного вида. Переходные и
частотные характеристики однозначно
связаны с дифференциальным уравнением
звена и его передаточной функцией и
наряду с ними являются исчерпывающим
описанием динамических свойств звена.
К числу основных временных характеристик звена или системы относятся переходная функция и функция веса.
Переходная
функция звена представляет собой сигнал
на выходе звена (реакцию
звена),
вызванный подачей на его вход единичного
ступенчатого воздействия.
Единичное ступенчатое воздействие
(единичная
ступенчатая функция, функция Хевисайда)
– это воздействие, которое мгновенно
возрастает
от нуля до единицы и далее остается
неизменным (рис. 2.4). Единичное ступенчатое
воздействие обозначается
![]() и может быть описано следующим выражением:
и может быть описано следующим выражением:
 (2.20)
(2.20)
Переходная
функция обычно обозначается
![]() .
Следовательно,
.
Следовательно,![]() – это выражение для
– это выражение для![]() при
при![]() =
=![]() .
.
Наряду
с переходной функцией при описании
звеньев и систем применяется функция
веса,
общепринятое обозначение которой
![]() .
Эта временная характеристика представляет
собой реакцию звена надельта-функцию
(единичную
импульсную функцию, иглу Дирака).
Дельта-функция, которая обозначается
.
Эта временная характеристика представляет
собой реакцию звена надельта-функцию
(единичную
импульсную функцию, иглу Дирака).
Дельта-функция, которая обозначается
![]() ,
– это математическая идеализация
предельно короткого импульсного сигнала
бесконечно большой амплитуды. Математически
дельта-функцию можно описать следующим
образом:
,
– это математическая идеализация
предельно короткого импульсного сигнала
бесконечно большой амплитуды. Математически
дельта-функцию можно описать следующим
образом:
![]()
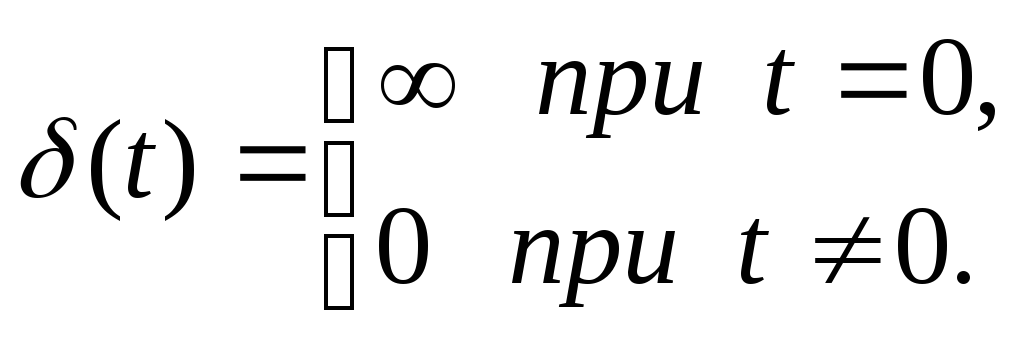 (2.21)
(2.21)
При этом согласно определению дельта-функции
![]() .
(2.22)
.
(2.22)
Таким
образом,
![]() -
это
-
это![]() при
при![]() =
=![]() .
.
Поскольку дельта-функция равна производной по времени от единичного ступенчатого воздействия, то и между переходной функцией, и функцией веса линейных звеньев существует аналогичная связь:
![]()
![]() .
(2.23)
.
(2.23)
И наоборот
![]() .
.
Зная переходную и функцию веса, можно определить реакцию звена на произвольное входное воздействие при нулевых начальных условиях с помощью следующих формул:
![]() ;
(2.24)
;
(2.24)
![]() ,
(2.25)
,
(2.25)
где
![]() ,
,![]() – значения
– значения![]() и
и![]() приt
= 0;
приt
= 0;
Выражения (2.24) и (2.25) легко получаются друг из друга, являясь вариантами интеграла Дюамеля или интеграла свертки. У реальных инерционных звеньев и систем h(0)=0, так как реакция на их выходе всегда отстает от входного воздействия. Поэтому в дальнейшем выражения (2.24) и (2.25) приводятся без первого слагаемого.
Временные характеристики могут быть выражены непосредственно через передаточную функцию звена с помощью преобразований Лапласа.
Поскольку
![]() ,
в случае,
когда входное воздействие
,
в случае,
когда входное воздействие
![]() (t)
представляет собой единичный импульс
(t)
представляет собой единичный импульс
![]() ,
и с учетом того, что его изображение по
Лапласу
,
и с учетом того, что его изображение по
Лапласу![]() ,
получим следующее выражение для
изображения функции веса звена:
,
получим следующее выражение для
изображения функции веса звена:
w(p)
=W(p) или ![]() ,
т.е.
,
т.е.
![]() .
(2.26)
.
(2.26)
Таким образом, функция веса определяется через передаточную функцию по формуле обратного преобразования Лапласа, т.е. является ее оригиналом.
В
случае, когда
![]() (t)
= 1(t),
учитывая, что L
(t)
= 1(t),
учитывая, что L![]() = 1/p,
получаем следующее выражение для
изображения переходной характеристики:
= 1/p,
получаем следующее выражение для
изображения переходной характеристики:
![]()
Следовательно, переходная характеристика звена равна:
![]()
При
рассмотрении частотных
характеристик
считаем, что на входе системы действует
гармонический сигнал с амплитудой
![]() и частотой
и частотой![]() :
:
![]() .
(2.27)
.
(2.27)
По окончании переходного процесса на выходе линейной системы будут существовать гармонические колебания с той же частотой, что и у входного сигнала, но в общем случае отличающиеся от него по амплитуде и фазе, т.е. в установившемся режиме выходная величина звена равна:
![]() ,
(2.28)
,
(2.28)
где
![]() – амплитуда установившихся выходных
колебаний;
– амплитуда установившихся выходных
колебаний;![]() – фазовый сдвиг между входными и
выходными синусоидальными колебаниями.
– фазовый сдвиг между входными и
выходными синусоидальными колебаниями.
При
изменении частоты
![]() изменяется, как соотношение между
амплитудами входных и выходных колебаний,
так и фазовый сдвиг
изменяется, как соотношение между
амплитудами входных и выходных колебаний,
так и фазовый сдвиг![]() между ними. При этом зависимость от
частоты отношения амплитуд называетсяамплитудно-частотной
характеристикой
(АЧХ), т.е.
между ними. При этом зависимость от
частоты отношения амплитуд называетсяамплитудно-частотной
характеристикой
(АЧХ), т.е.
![]() .
.
Зависимость
величины фазового сдвига от частоты
![]() называетсяфазо-частотной
характеристикой (ФЧХ).
называетсяфазо-частотной
характеристикой (ФЧХ).
Определив амплитудно- и фазо-частотную характеристики системы, например, получив их экспериментально, можно построить еще одну частотную характеристику – амплитудно-фазовую (АФЧХ).
Амплитудно-фазовую
характеристику, используя
![]() в качестве полярных координат, строят
на комплексной плоскости по следующим
правилам. Задаются значением частотыωi,
для которого
по графику ФЧХ
определяют
величину фазового сдвига φ(ωi)
, а по графику АЧХ – величину A(ωi).
в качестве полярных координат, строят
на комплексной плоскости по следующим
правилам. Задаются значением частотыωi,
для которого
по графику ФЧХ
определяют
величину фазового сдвига φ(ωi)
, а по графику АЧХ – величину A(ωi).
И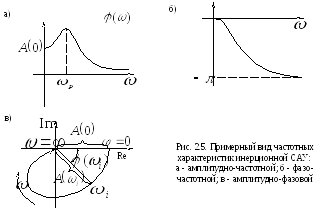 з
начала координат комплексной плоскости
проводится луч под угломφ(ωi)
к положительной
действительной полуоси. Угол откладывается
против часовой стрелки, если φ(ωi)
> 0, т.е.
когда выходной гармонический сигнал
опережает входной, и в противоположном
направлении, если φ(ωi)
< 0 .Из начала
координат по этому лучу откладывается
отрезок, длина которого в выбранном
масштабе равна A(ωi)
(рис.
2.5, в).
з
начала координат комплексной плоскости
проводится луч под угломφ(ωi)
к положительной
действительной полуоси. Угол откладывается
против часовой стрелки, если φ(ωi)
> 0, т.е.
когда выходной гармонический сигнал
опережает входной, и в противоположном
направлении, если φ(ωi)
< 0 .Из начала
координат по этому лучу откладывается
отрезок, длина которого в выбранном
масштабе равна A(ωi)
(рис.
2.5, в).
Каждая точка амплитудно-фазовой частотной характеристики соответствует определенному значению частоты. Значения для конечного количества точек характеристики наносятся вдоль характеристики и указывают направление возрастания частоты ω.
Очевидно,
что возможно и решение обратной задачи:
по годографу
амплитудно-фазовую частотную
характеристику можно построить
характеристики
![]() и
и![]() .
На рис. 2.5 приведен примерный вид этих
характеристик для инерционной системы.
.
На рис. 2.5 приведен примерный вид этих
характеристик для инерционной системы.
Как показано на этих рисунках, у таких звеньев в силу их инерционности амплитудная частотная характеристика по мере увеличения частоты в конце концов спадает до нуля. При этом, чем менее инерционно звено, тем шире его амплитудная частотная характеристика, т.е. тем больше полоса пропускаемых звеном частот, или просто его полоса пропускания.
Теоретически
частотная характеристика продолжается
до бесконечности, но практически полоса
пропускания оценивается значением
частоты, при котором отношение амплитуд
окончательно становится меньше
определенного, достаточно малого
конечного значения. Это значение обычно
берут равным 0,05 (на этой частоте амплитуда
выходных колебаний падает до 5 % амплитуды
входных колебаний). Наличие максимума
у амплитудной частотной характеристики
говорит о резонансных свойствах звена.
Частота, соответствующая максимуму
амплитудной характеристики, называется
резонансной
(![]() ).
).
Фазовая
характеристика у обычных инерционных
звеньев (рис. 2.5, б) отрицательна (![]() (ω)<
0), т.е. выходные колебания отстают по
фазе от входных, и это отставание растет
с частотой.
(ω)<
0), т.е. выходные колебания отстают по
фазе от входных, и это отставание растет
с частотой.
Используя символическую форму записи гармонических сигналов xвх(t) и xвых(t), получим аналитические выражения для рассмотренных характеристик, их зависимость между собой и с передаточной функцией системы.
Символическая запись сигналов (2.27) и (2.28):
![]() ,
,
![]() .
.
Определим амплитудно-фазовую характеристику системы, как отношение выходного сигнала системы к входному, выраженное в комплексной форме:
 .
(2.29)
.
(2.29)
Из выражения (2.29) следует, что амплитудно-частотная и фазо-частотная характеристики является соответственно модулем и фазой (аргументом) амплидудно-фазовой характеристики: