Файл: Г.М. Гринфельд ТЕОРИЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ уч. пособие.doc
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 29.07.2024
Просмотров: 609
Скачиваний: 3
СОДЕРЖАНИЕ
1. ОсновНые понятия и определения теории автоматического управления
1.1. Краткие сведения по истории развития систем автоматического управления
1.2. Обобщенная структурная схема сау
2. Математическое описание линейных сау
2.1. Составление и линеаризация дифференциальных уравнений сау
Основные свойства (теоремы) преобразования Лапласа
Изображения по Лапласу типовых сигналов
2.3. Временные и частотные характеристики звеньев и систем
2.4. Элементарные звенья систем автоматического управления
Пропорциональное (усилительное, безинерционное, масштабирующее) звено
Идеальное дифференцирующее звено
Апериодическое звено первого порядка
Реальное дифференцирующее звено
Инерционное звено второго порядка
Интегро-дифференцирующее звено
Пропорционально-интегральный регулятор (пи-регулятор)
2.5. Неминимально-фазовые звенья
2.6. Эквивалентные преобразования структурных схем линейных сау
2.7. Передаточные функции многоконтурных систем
3. Анализ устойчивости линейныхсау
3.1.Понятие устойчивости линейных систем
3.2.Алгебраический критерий устойчивости Гурвица
3.3.Частотные критерии устойчивости Михайлова и Найквиста
3.5.Оценка устойчивости по логарифмическим амплитудно- и фазо-частотным характеристикам
3.6.Устойчивость систем с запаздыванием
4. Качество динамических характеристик сау
4.1. Показатели качества процесса регулирования
4.2. Частотные критерии качества
4.3. Корневые критерии качества
4.4. Интегральные критерии качества
5.1. Стационарные режимы сау. Передаточные функции статических и астатических систем
5.2. Коэффициенты ошибки системы
5.3. Системы комбинированного управления
6. Анализ сау в пространстве состояния
6.1. Основные положения метода переменных состояния
6.2. Способы построения схем переменных состояния
Метод прямого программирования
Метод параллельного программирования
Метод последовательного программирования
6.3. Решение уравнений состояния линейных стационарных сау. Вычисление фундаментальной матрицы
Последовательные корректирующие звенья
Параллельные корректирующие звенья
7.2. Частотный метод синтеза корректирующих устройств
Построение лах в низкочастотном диапазоне
Построение лах в среднечастотном диапазоне
Зависимость колебательности от значений hи h1
Построение лах в высокочастотном диапазоне
7.3. Последовательные корректирующие устройства
7.4. Параллельные корректирующие устройства
7.5. Техническая реализация корректирующих звеньев
Пассивные четырехполюсники постоянного тока
Пассивные корректирующие четырехполюсники
Активные корректирующие звенья
Активные четырехполюсники постоянного тока
8. Нелинейные системы автоматического управления
8.1. Особенности нелинейных систем и методы их анализа
8.2. Исследование нелинейных систем на фазовой плоскости
8.3. Метод гармонической линеаризации нелинейных звеньев
Коэффициенты гармонической линеаризации типовых нелинейностей
8.5. Методы определения параметров автоколебаний
Задание для расчета линейной caу
Варианты задания для расчета линейной сау
Варианты передаточных функций линейной сау
Задание для расчета нелинейной сау
Варианты задания для расчета нелинейной сау
Варианты структурных схем нелинейных систем Варианты статических характеристик нелинейного элемента
Вопросы для самопроверки
Что такое переменные состояния? Поясните их физический смысл.
В чем заключается неоднозначность выбора переменных состояния?
Назовите основные методы выбора переменных состояния.
Между какими сигналами устанавливает связь матрица наблюдения?
Что такое характеристическая матрица?
От чего зависит размерность матрицы управления?
Запишите векторные уравнения состояния системы.
Назовите способы определения фундаментальной матрицы системы.
7. Коррекция линейных сАу
7.1. Цели и виды коррекции
Коррекция САУ осуществляется с целью обеспечения требуемых показателей качества регулирования систем как в статике, так и в динамике. Очевидно, что с наименьшими затратами улучшить показатели качества регулирования можно, изменяя те или иные параметры системы. Однако зачастую возможности такой параметрической коррекции ограничены. Например, увеличение коэффициента усиления системы с целью повышения точности регулирования, сопряжено со снижением запасов устойчивости.
В случае неэффективности параметрической коррекции осуществляют изменение структуры системы, вводя в нее корректирующие звенья с заранее определенной передаточной функцией Wкз (р).
Основная задача корректирующих звеньев состоит в обеспечении требуемых запасов устойчивости, улучшении точности системы и качества переходных процессов. Различают два основных типа корректирующих звеньев или вида коррекции.
Последовательные корректирующие звенья
Последовательные
корректирующие звенья,
как это следует из их названия, вводятся
в систему последовательно со звеньями
исходной нескорректированной системы
(рис. 7.1, а). При этом передаточная функция
разомкнутой скорректированной системы
![]() равна:
равна:
![]() ,
(7.1)
,
(7.1)
г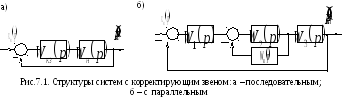 де
де![]() -
передаточная функция нескорректированной
системы.
-
передаточная функция нескорректированной
системы.
Параллельные корректирующие звенья
Параллельные корректирующие звенья вводятся в каналы дополнительных местных обратных связей (рис. 7.1, б). В этом случае передаточная функция разомкнутой скорректированной системы равна:
![]() ,
(7.2)
,
(7.2)
где
![]() – передаточные функции звеньев
нескорректированной системы, соответственно
охваченные и неохваченные корректирующей
обратной связью.
– передаточные функции звеньев
нескорректированной системы, соответственно
охваченные и неохваченные корректирующей
обратной связью.
Для системы (рис. 7.1, б) указанные передаточные функции равны:
![]() .
.
7.2. Частотный метод синтеза корректирующих устройств
В инженерной практике синтез корректирующих устройств чаще всего осуществляется с помощью логарифмических частотных характеристик в следующем порядке:
по виду передаточной функции
 строится ЛАХ исходной разомкнутой
нескорректированной САУ
строится ЛАХ исходной разомкнутой
нескорректированной САУ
 ;
;с учетом всей совокупности требований, предъявляемых к качеству процесса регулирования САУ, строится желаемая логарифмическая амплитудная частотная характеристика
 разомкнутой системы;
разомкнутой системы;на основании сравнения ЛАХ нескорректированной системы с
 определяется ЛАХ корректирующего
звена
определяется ЛАХ корректирующего
звена
 .
Так как у
минимально-фазовых систем
ЛАХ
однозначно определяет весь
характер переходного процесса, то для
осуществления синтеза достаточно
рассмотрения одних ЛАХ;
.
Так как у
минимально-фазовых систем
ЛАХ
однозначно определяет весь
характер переходного процесса, то для
осуществления синтеза достаточно
рассмотрения одних ЛАХ;по виду
 определяются передаточная функция
корректирующего звена , ее параметры
и техническая реализация;
определяются передаточная функция
корректирующего звена , ее параметры
и техническая реализация;
производится проверочный расчет переходного процесса с учетом реальной структуры и места включения корректирующего звена, оценка запасов устойчивости и показателей качества скорректированной САУ.
Если скорректированная САУ удовлетворяет заданным показателям качества, то синтез на этом заканчивается. В противном случае уточняется структура и параметры корректирующего звена; далее снова производится проверочный расчет.
Построение желаемой ЛАХ удобно первоначально осуществлять раздельно в низкочастотном (I), среднечастотном (II) и высокочастотном (III) диапазонах.
Построение лах в низкочастотном диапазоне
На
низкочастотном участке, где вид
![]() определяется
в основном требованиями к точности
регулирования, а следовательно, величиной
коэффициента усиления системы, порядком
ее астатизма, значением коэффициента
ошибки и т.д.
определяется
в основном требованиями к точности
регулирования, а следовательно, величиной
коэффициента усиления системы, порядком
ее астатизма, значением коэффициента
ошибки и т.д.
Если
в системе, отрабатывающей ступенчатый
входной сигнал
![]() ,
допустимая статическая ошибка не должна
превышать значения
,
допустимая статическая ошибка не должна
превышать значения![]() ,
то в соответствии с выражением (5.2)
величина коэффициента усиления
разомкнутой скорректированной системы:
,
то в соответствии с выражением (5.2)
величина коэффициента усиления
разомкнутой скорректированной системы:
![]() ≥
≥![]() –1.
–1.
При
этом на участке низких частот желаемая
ЛАХ проводится параллельно оси абсцисс
с ординатой
![]() .
В случае, когда статическая ошибка
недопустима (
.
В случае, когда статическая ошибка
недопустима (![]() =
0), то
скорректированная система должна быть
астатической.
=
0), то
скорректированная система должна быть
астатической.
Если
в
астатической системе с астатизмом
первого порядка требуется обеспечить
слежение
за сигналом
![]() ,
то ее коэффициент усиления, согласно
выражению (5.2) определяется величиной
максимально допустимой ошибки по
скорости
,
то ее коэффициент усиления, согласно
выражению (5.2) определяется величиной
максимально допустимой ошибки по
скорости![]() :
:
![]() ≥
≥![]() .
.
При этом уравнение низкочастотного участка желаемой ЛАХ:
![]() .
.
При
синтезе следящих систем, входной сигнал
которых заранее неизвестная функция
времени, обычно указываются только
максимально возможные значения скорости
(![]() )
и ускорения (
)
и ускорения (![]() )
входного сигнала и задаются требованием
к величине максимально допустимой
динамической ошибке регулирования (
)
входного сигнала и задаются требованием
к величине максимально допустимой
динамической ошибке регулирования (![]() ).
В этом случае подбирается эквивалентное
гармоническое воздействие
).
В этом случае подбирается эквивалентное
гармоническое воздействие![]() ,
амплитуда и частота которого определяется
значениями
,
амплитуда и частота которого определяется
значениями![]() и
и![]() :
:
 и
и ![]() .
(7.3)
.
(7.3)
При
воспроизведении линейной следящей
системой эквивалентного гармонического
воздействия ошибка регулирования также
будет гармонической с той же частотой
![]() и
амплитудой
и
амплитудой![]() .
Следовательно:
.
Следовательно:
![]() ,
т.е.
,
т.е.
![]()
![]() .
.
Полагая
![]() >> 1, имеем
>> 1, имеем![]()
![]() ,
откуда с учетом выражения (7.3):
,
откуда с учетом выражения (7.3):
![]()
![]()
 .
(7.4)
.
(7.4)
И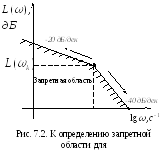 з
выражения (7.4) следует, что эквивалентное
входное воздействие будет воспроизводиться
следящей системой с ошибкой, не превышающей
з
выражения (7.4) следует, что эквивалентное
входное воздействие будет воспроизводиться
следящей системой с ошибкой, не превышающей![]() ,
если при
,
если при![]() ордината желаемой ЛАХ будет не менее
ордината желаемой ЛАХ будет не менее
 .
.
Точку
К
с координатами (![]() ;
;![]() )
называютконтрольной
точкой
(рис. 7.2). На
этом рисунке указаны две прямые,
пересекающиеся в точке К,
имеющие наклон -20 дБ/дек при
)
называютконтрольной
точкой
(рис. 7.2). На
этом рисунке указаны две прямые,
пересекающиеся в точке К,
имеющие наклон -20 дБ/дек при
![]() <
<![]() и -40 дБ/дек при
и -40 дБ/дек при![]() >
>![]() .
Уравнения этих прямых получены на
основании выражения (7.4) при уменьшении
скорости и ускорения входного сигнала
по отношению к их максимально возможным
значениям. Данные прямые представляют
собой границы запретной зоны для желаемой
ЛАХ следящей системы с астатизмом
первого порядка.
.
Уравнения этих прямых получены на
основании выражения (7.4) при уменьшении
скорости и ускорения входного сигнала
по отношению к их максимально возможным
значениям. Данные прямые представляют
собой границы запретной зоны для желаемой
ЛАХ следящей системы с астатизмом
первого порядка.