Файл: Г.М. Гринфельд ТЕОРИЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ уч. пособие.doc
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 29.07.2024
Просмотров: 610
Скачиваний: 3
СОДЕРЖАНИЕ
1. ОсновНые понятия и определения теории автоматического управления
1.1. Краткие сведения по истории развития систем автоматического управления
1.2. Обобщенная структурная схема сау
2. Математическое описание линейных сау
2.1. Составление и линеаризация дифференциальных уравнений сау
Основные свойства (теоремы) преобразования Лапласа
Изображения по Лапласу типовых сигналов
2.3. Временные и частотные характеристики звеньев и систем
2.4. Элементарные звенья систем автоматического управления
Пропорциональное (усилительное, безинерционное, масштабирующее) звено
Идеальное дифференцирующее звено
Апериодическое звено первого порядка
Реальное дифференцирующее звено
Инерционное звено второго порядка
Интегро-дифференцирующее звено
Пропорционально-интегральный регулятор (пи-регулятор)
2.5. Неминимально-фазовые звенья
2.6. Эквивалентные преобразования структурных схем линейных сау
2.7. Передаточные функции многоконтурных систем
3. Анализ устойчивости линейныхсау
3.1.Понятие устойчивости линейных систем
3.2.Алгебраический критерий устойчивости Гурвица
3.3.Частотные критерии устойчивости Михайлова и Найквиста
3.5.Оценка устойчивости по логарифмическим амплитудно- и фазо-частотным характеристикам
3.6.Устойчивость систем с запаздыванием
4. Качество динамических характеристик сау
4.1. Показатели качества процесса регулирования
4.2. Частотные критерии качества
4.3. Корневые критерии качества
4.4. Интегральные критерии качества
5.1. Стационарные режимы сау. Передаточные функции статических и астатических систем
5.2. Коэффициенты ошибки системы
5.3. Системы комбинированного управления
6. Анализ сау в пространстве состояния
6.1. Основные положения метода переменных состояния
6.2. Способы построения схем переменных состояния
Метод прямого программирования
Метод параллельного программирования
Метод последовательного программирования
6.3. Решение уравнений состояния линейных стационарных сау. Вычисление фундаментальной матрицы
Последовательные корректирующие звенья
Параллельные корректирующие звенья
7.2. Частотный метод синтеза корректирующих устройств
Построение лах в низкочастотном диапазоне
Построение лах в среднечастотном диапазоне
Зависимость колебательности от значений hи h1
Построение лах в высокочастотном диапазоне
7.3. Последовательные корректирующие устройства
7.4. Параллельные корректирующие устройства
7.5. Техническая реализация корректирующих звеньев
Пассивные четырехполюсники постоянного тока
Пассивные корректирующие четырехполюсники
Активные корректирующие звенья
Активные четырехполюсники постоянного тока
8. Нелинейные системы автоматического управления
8.1. Особенности нелинейных систем и методы их анализа
8.2. Исследование нелинейных систем на фазовой плоскости
8.3. Метод гармонической линеаризации нелинейных звеньев
Коэффициенты гармонической линеаризации типовых нелинейностей
8.5. Методы определения параметров автоколебаний
Задание для расчета линейной caу
Варианты задания для расчета линейной сау
Варианты передаточных функций линейной сау
Задание для расчета нелинейной сау
Варианты задания для расчета нелинейной сау
Варианты структурных схем нелинейных систем Варианты статических характеристик нелинейного элемента
![]() ;
;
![]() .
.
Г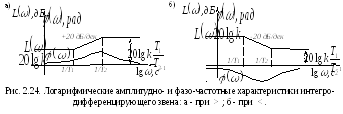 рафики
логарифмической амплитудно- и
фазо-частотной характеристик приведены
на рис. 2.24. Очевидно, что при
рафики
логарифмической амплитудно- и
фазо-частотной характеристик приведены
на рис. 2.24. Очевидно, что при![]() >
>![]() в среднечастотном диапазоне преобладают
дифференцирующие свойства звена (наклон
ЛАХ +20дБ/дек), а при
в среднечастотном диапазоне преобладают
дифференцирующие свойства звена (наклон
ЛАХ +20дБ/дек), а при![]() <
<![]() – интегрирующие свойства (наклон ЛАХ
-20 дБ/дек).
– интегрирующие свойства (наклон ЛАХ
-20 дБ/дек).
Воспользуемся формулой разложения (2.15) для получения выражение переходной функции интегро-дифференцирующего звена.
Изображение по Лапласу переходной функции:
![]()
В соответствии с выражением (2.15):
![]() ;
;
![]() ;
;![]() ;
;
![]() ;
;
![]() ;
;![]() ;
;![]() ;
;
![]() и
и
![]()
Следовательно, переходная функция интегро-дифференцирующего звена (рис. 2.25) имеет вид:
![]()
Пропорционально-интегральный регулятор (пи-регулятор)
Пропорционально-интегральный регулятор (ПИ-регулятор) – это звено, зависимость между выходным и входным сигналами которого описывается следующим дифференциальным уравнением:
![]()
Операторное уравнение звена:
![]() .
.
Передаточная функция звена
![]() .
.
Следовательно, изображение по Лапласу сигнала на выходе звена представляет собой сумму двух составляющих, одна из которых пропорциональна входному сигналу, а вторая – пропорциональна интегралу от входного сигнала, что и определяет название данного звена:
![]() .
.
Частотные характеристики ПИ-регулятора:
![]() ;
; ![]()
![]() ;
;
![]() ;
; ![]() ;
;
![]() .
.
Г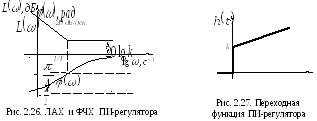 рафики
логарифмических амплитудно- и
фазо-частотной характеристик звена
приведены на рис.2.26.
рафики
логарифмических амплитудно- и
фазо-частотной характеристик звена
приведены на рис.2.26.
Переходная функция звена (рис. 2.27):
![]()
![]() .
.
2.5. Неминимально-фазовые звенья
Мы рассмотрели наиболее часто встречающиеся на практике типы минимально-фазовых звеньев. В отличие от них передаточная функция любого неминимально-фазового звена имеет хотя бы один «правый» ноль или полюс. Приведем пример такой передаточной функции:
![]() .
.
Здесь имеется положительный полюс (корень знаменателя):
![]() .
.
Частотные характеристики такого звена:
![]()
![]() ;
;
![]() ,
,
так
как при
![]() входной и выходной гармонические сигналы
находятся в противофазе.
входной и выходной гармонические сигналы
находятся в противофазе.
В то же время для обычного апериодического звена имеем:
![]()
Разница между ними, как видим, в величине фазы, амплитудные же характеристики одинаковы. Оказывается, что из всех возможных звеньев с одинаковыми амплитудными характеристиками минимально-фазовые типовые звенья обладают наименьшими по абсолютному значению фазовыми характеристиками. В этом и состоит смысл введенных терминов.
Важным
свойством минимально-фазовых звеньев
является однозначное соответствие
амплитудной и фазовой частотных
характеристик. Другими словами, по
заданной амплитудно-частотной
характеристике всегда можно определить
амплитудно-фазовую и наоборот. Этим же
свойством обладают вещественная
![]() и мнимая
и мнимая![]() части амплитудно-фазовой характеристики
минимально-фазовых звеньев.
части амплитудно-фазовой характеристики
минимально-фазовых звеньев.
Заметим, что для данного неминимально-фазового звена переходная функция будет расходящейся, вместо обычной затухающей.
2.6. Эквивалентные преобразования структурных схем линейных сау
В САУ встречаются три вида соединений звеньев: последовательное, параллельное и соединение звеньев по схеме с обратной связью.
В системе, состоящей из n последовательно соединенных звеньев (рис. 2.28) выходной сигнал предыдущего звена равен входному сигналу последующего.
И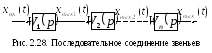 зображения
по Лапласу выходных сигналов этих
звеньев равны:
зображения
по Лапласу выходных сигналов этих
звеньев равны:
xвых1(p) = W1(p)xвх(p); xвых2(p) = W2(p) xвых1(p); … xвых(p) = Wn(p)xвых(n)(p).
Откуда
xвых![]() xвх(p).
xвх(p).
Следовательно, передаточная функция системы примет вид:
![]() .
(2.57)
.
(2.57)
Таким образом, передаточная функция последовательно соединенных звеньев равна произведению передаточных функций этих звеньев.
Частотные характеристики последовательно соединенных звеньев:
![]()
где
A(ω)
= A1(ω)A2(ω)…An(ω);
![]() .
.
Логарифмическая амплитудно-частотная характеристика звеньев, соединенных последовательно:
![]()
![]() .(2.58)
.(2.58)
Следовательно, логарифмические амплитудно- и фазо-частотная характеристики системы, состоящей из последовательно соединенных звеньев, равны сумме ЛАХ и ФЧХ отдельных звеньев. Это существенно упрощает построение логарифмических частотных характеристик, по сравнению с обычными характеристиками.
Передаточная функция минимально-фазовой системы в общем случае может быть записана в виде:
 .
(2.59)
.
(2.59)
В
выражении (2.59) сомножители в числителе
![]() определяют
нули передаточной функции, а именно:
определяют
нули передаточной функции, а именно:
сомножитель
 соответствует
нулевому нолю кратности
соответствует
нулевому нолю кратности ,
,сомножитель
 – действительному нолю
– действительному нолю кратностиl,
кратностиl,
сомножитель
 – паре комплексно-сопряженных нолей
кратности
– паре комплексно-сопряженных нолей
кратности
 .
.
Аналогичные
сомножители в знаменателе выражения
(2.59)
![]() определяют полюса передаточной функции,
а именно:
определяют полюса передаточной функции,
а именно:
сомножитель
 соответствует
нулевому полюсу кратности
соответствует
нулевому полюсу кратности ,
,сомножитель
 – действительному полюсу
– действительному полюсу кратности
кратности ,
,сомножитель
 – паре комплексно-сопряженных полюсов
кратности
– паре комплексно-сопряженных полюсов
кратности
 .
.
Очевидно,
что в зависимости от соотношения s
и
![]() передаточная функция (2.59) может иметь
только один тип особенностей: либо
нулевые ноли, либо нулевые полюса. Кроме
того, предполагается, что в (2.59) для
коэффициентов демпфирования выполняются
неравенства: 0 <ζ
< 1.
передаточная функция (2.59) может иметь
только один тип особенностей: либо
нулевые ноли, либо нулевые полюса. Кроме
того, предполагается, что в (2.59) для
коэффициентов демпфирования выполняются
неравенства: 0 <ζ
< 1.
Формально
передаточная функция (2.59) представляет
собой произведение нескольких
сомножителей, что соответствует
последовательному соединению звеньев,
и для вычисления
![]() можно
воспользоваться выражением (2.58). При
этом построение ЛАХ системы осуществляется
без предварительного построения ЛАХ
отдельных звеньев по следующим правилам.
можно
воспользоваться выражением (2.58). При
этом построение ЛАХ системы осуществляется
без предварительного построения ЛАХ
отдельных звеньев по следующим правилам.