Файл: Г.М. Гринфельд ТЕОРИЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ уч. пособие.doc
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 29.07.2024
Просмотров: 619
Скачиваний: 3
СОДЕРЖАНИЕ
1. ОсновНые понятия и определения теории автоматического управления
1.1. Краткие сведения по истории развития систем автоматического управления
1.2. Обобщенная структурная схема сау
2. Математическое описание линейных сау
2.1. Составление и линеаризация дифференциальных уравнений сау
Основные свойства (теоремы) преобразования Лапласа
Изображения по Лапласу типовых сигналов
2.3. Временные и частотные характеристики звеньев и систем
2.4. Элементарные звенья систем автоматического управления
Пропорциональное (усилительное, безинерционное, масштабирующее) звено
Идеальное дифференцирующее звено
Апериодическое звено первого порядка
Реальное дифференцирующее звено
Инерционное звено второго порядка
Интегро-дифференцирующее звено
Пропорционально-интегральный регулятор (пи-регулятор)
2.5. Неминимально-фазовые звенья
2.6. Эквивалентные преобразования структурных схем линейных сау
2.7. Передаточные функции многоконтурных систем
3. Анализ устойчивости линейныхсау
3.1.Понятие устойчивости линейных систем
3.2.Алгебраический критерий устойчивости Гурвица
3.3.Частотные критерии устойчивости Михайлова и Найквиста
3.5.Оценка устойчивости по логарифмическим амплитудно- и фазо-частотным характеристикам
3.6.Устойчивость систем с запаздыванием
4. Качество динамических характеристик сау
4.1. Показатели качества процесса регулирования
4.2. Частотные критерии качества
4.3. Корневые критерии качества
4.4. Интегральные критерии качества
5.1. Стационарные режимы сау. Передаточные функции статических и астатических систем
5.2. Коэффициенты ошибки системы
5.3. Системы комбинированного управления
6. Анализ сау в пространстве состояния
6.1. Основные положения метода переменных состояния
6.2. Способы построения схем переменных состояния
Метод прямого программирования
Метод параллельного программирования
Метод последовательного программирования
6.3. Решение уравнений состояния линейных стационарных сау. Вычисление фундаментальной матрицы
Последовательные корректирующие звенья
Параллельные корректирующие звенья
7.2. Частотный метод синтеза корректирующих устройств
Построение лах в низкочастотном диапазоне
Построение лах в среднечастотном диапазоне
Зависимость колебательности от значений hи h1
Построение лах в высокочастотном диапазоне
7.3. Последовательные корректирующие устройства
7.4. Параллельные корректирующие устройства
7.5. Техническая реализация корректирующих звеньев
Пассивные четырехполюсники постоянного тока
Пассивные корректирующие четырехполюсники
Активные корректирующие звенья
Активные четырехполюсники постоянного тока
8. Нелинейные системы автоматического управления
8.1. Особенности нелинейных систем и методы их анализа
8.2. Исследование нелинейных систем на фазовой плоскости
8.3. Метод гармонической линеаризации нелинейных звеньев
Коэффициенты гармонической линеаризации типовых нелинейностей
8.5. Методы определения параметров автоколебаний
Задание для расчета линейной caу
Варианты задания для расчета линейной сау
Варианты передаточных функций линейной сау
Задание для расчета нелинейной сау
Варианты задания для расчета нелинейной сау
Варианты структурных схем нелинейных систем Варианты статических характеристик нелинейного элемента
2. Математическое описание линейных сау
2.1. Составление и линеаризация дифференциальных уравнений сау
Процессы, происходящие в САУ, в общем случае описываются нелинейными дифференциальными уравнениями, которые могут быть решены лишь в отдельных редких случаях. Однако для достаточно большого числа систем эти уравнения с приемлемой для решения практических задач точностью могут бытьзаменены линеаризованными.
Рассмотрим
принцип линеаризации на примере системы,
у которой входной![]() и выходной
и выходной![]() сигналы связаны нелинейной статической
зависимостью
сигналы связаны нелинейной статической
зависимостью![]() .
Пусть в установившемся режиме величина
входного сигнала равна
.
Пусть в установившемся режиме величина
входного сигнала равна![]() и
его отклонения от этого значения в
переходных процессах достаточно малы.
и
его отклонения от этого значения в
переходных процессах достаточно малы.
Разложив
нелинейную зависимость
![]() в
ряд Тейлора в окружности точки
установившегося режима и, отбросив
члены ряда выше первого порядка малости,
получим следующую приближенную
зависимость:
в
ряд Тейлора в окружности точки
установившегося режима и, отбросив
члены ряда выше первого порядка малости,
получим следующую приближенную
зависимость:
 ,
(2.1)
,
(2.1)
где
![]()
 -
значение производной функции
-
значение производной функции![]() по
по![]() при
подстановке в выражение этой производной
значения
при
подстановке в выражение этой производной
значения![]() =
=![]() .
.
В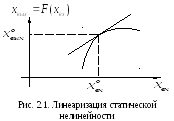 ыражение
(2.1) можно переписать в виде:
ыражение
(2.1) можно переписать в виде:
![]() ,
(2.2)
,
(2.2)
где
![]()
![]() ;
;![]()
![]() ;
;
![]()
 .
.
Проведенная
линеаризация имеет простую графическую
интерпретацию: она соответствует (рис.
2.1) замене действительной нелинейной
характеристики касательной к ней в
точке, соответствующей установившемуся
режиму. Коэффициент
k
в выражении
(2.2) равен тангенсу угла наклона этой
касательной относительно оси
![]() .
Поэтому его величина может быть найдена
простым графическим построением без
нахождения аналитического выражения
нелинейной зависимости
.
Поэтому его величина может быть найдена
простым графическим построением без
нахождения аналитического выражения
нелинейной зависимости![]() и
ее производной.
и
ее производной.
В более общем случае, система описывается нелинейным дифференциальным уравнением, связывающим производные по времени входного и выходного сигналов:
 .
.
(2.3)
Разложив нелинейную функцию (2.3) в ряд Тейлора в точке установившегося движения, получим следующее линейное дифференциальное уравнение для приращения переменных:
![]()
![]()
![]() ….+
….+![]()
![]() …
…
+……![]() …..
…..![]() ,
(2.4)
,
(2.4)
где
![]()
![]() ..,
..,![]()
![]() и
т.д. – значения производных функции
(2.3) полученные при подстановке значений
входного и выходного сигналов,
соответствующих установившемуся режиму.
и
т.д. – значения производных функции
(2.3) полученные при подстановке значений
входного и выходного сигналов,
соответствующих установившемуся режиму.
Следовательно, процедура линеаризации нелинейных систем дает возможность описать их линейными дифференциальными уравнениями в отклонениях. Очевидно, что допустимость такой линеаризации ограничена требованием к незначительности отклонений сигналов от их установившихся значений. Кроме того, поскольку такая линеаризация основана на разложении в ряд Тейлора, она применима только к непрерывно дифференцируемым нелинейностям.
Нелинейные звенья и системы, не удовлетворяющие этому требованию, называются существенно нелинейными. К существенно нелинейным звеньям относятся звенья с прерывистыми характеристиками, например, звенья с релейными характеристиками или неоднозначными характеристиками типа петли гистерезиса.
2.2. Основные свойства преобразования Лапласа. Операторные уравнения сау. Передаточные функции линейных звеньев и систем
В общем случае дифференциальное уравнение, связывающее изменение во времени входной и выходной сигналы линеаризованной системы, имеет следующий вид:
![]()
(2.5)
Решение дифференциальных уравнений (2.3) – (2.4) зачастую связано со значительными трудностями, а во многих случаях, например в следящих системах, не может быть осуществлено, так как неизвестно управляющее воздействие. По этим причинам исследование систем ведется косвенными методами, например, базирующимися на операционном преобразовании Лапласа.
Приведем основные сведения о преобразовании Лапласа, которые будут использованы при рассмотрении систем, описываемых линейными дифференциальными уравнениями.
Преобразованием Лапласа называют интегральное преобразование:
![]() ,
(2.6)
,
(2.6)
определяющее
соответствие между функцией
![]() вещественного переменного (в рассматриваемой
теории – функцией времени
вещественного переменного (в рассматриваемой
теории – функцией времени![]() )
и функцией
)
и функцией![]() комплексного переменного
комплексного переменного![]() .
При этом
.
При этом![]() называюторигиналом,
а
называюторигиналом,
а
![]() –изображением
или
изображением
по Лапласу.
Символическая запись такого
преобразования:
–изображением
или
изображением
по Лапласу.
Символическая запись такого
преобразования:
![]() =
=![]() ,
,
где
![]() – оператор преобразования Лапласа.
– оператор преобразования Лапласа.
Предполагается,
что функция времени
![]() ,
которая подвергается преобразованию
Лапласа, обладает следующими свойствами:
,
которая подвергается преобразованию
Лапласа, обладает следующими свойствами:
 определена
и дифференцируема на всей положительной
числовой полуоси
определена
и дифференцируема на всей положительной
числовой полуоси
 ;
; =
0 при
=
0 при
 ;
;существуют такие числа М и
 ,
что
,
что при
при .
.
Функции, обладающие указанными тремя свойствами, часто называют функциями-оригиналами.
Соотношение
![]() =
= ,
(2.7)
,
(2.7)
определяющее
по известному изображению его оригинал
(в точках непрерывности последнего),
называют обратным
преобразованием Лапласа.
В нем интеграл берется вдоль прямой Re
p
=
![]() .
Символически обратное преобразование
Лапласа можно записать так:
.
Символически обратное преобразование
Лапласа можно записать так:
![]() =
=![]() ,
,
где
![]() – символ обратного преобразования
Лапласа.
– символ обратного преобразования
Лапласа.
Основные свойства (теоремы) преобразования Лапласа
Линейность преобразования. Для любых постоянных
 и
и
![]() .
(2.8)
.
(2.8)
Дифференцирование оригинала. Если производная
 является функцией-оригиналом, т.е.
обладает указанными тремя свойствами,
то
является функцией-оригиналом, т.е.
обладает указанными тремя свойствами,
то ,
где
,
где =
= ,
, .
И вообще, еслиn-я
производная
.
И вообще, еслиn-я
производная
 является функцией-оригиналом, то
является функцией-оригиналом, то
![]() ,
,
где
![]() ,k=0,1,…n-1.
,k=0,1,…n-1.
Если
начальные условия нулевые, т.е.
![]() ,
то последняя формула принимает вид:
,
то последняя формула принимает вид:
![]() .
(2.9)
.
(2.9)
Таким образом, при нулевых начальных условиях дифференцированию соответствует умножение изображения на р.
Интегрирование интеграла. Интегрирование оригинала сводится к делению изображения на р:
 .
(2.10)
.
(2.10)
Теорема запаздывания. Для любого положительного числа
![]() .
(2.11)
.
(2.11)
Теорема умножения изображения. Если
 и
и – оригиналы,
– оригиналы, и
и – их изображения, то
– их изображения, то