Файл: Г.М. Гринфельд ТЕОРИЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ уч. пособие.doc
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 29.07.2024
Просмотров: 728
Скачиваний: 3
СОДЕРЖАНИЕ
1. ОсновНые понятия и определения теории автоматического управления
1.1. Краткие сведения по истории развития систем автоматического управления
1.2. Обобщенная структурная схема сау
2. Математическое описание линейных сау
2.1. Составление и линеаризация дифференциальных уравнений сау
Основные свойства (теоремы) преобразования Лапласа
Изображения по Лапласу типовых сигналов
2.3. Временные и частотные характеристики звеньев и систем
2.4. Элементарные звенья систем автоматического управления
Пропорциональное (усилительное, безинерционное, масштабирующее) звено
Идеальное дифференцирующее звено
Апериодическое звено первого порядка
Реальное дифференцирующее звено
Инерционное звено второго порядка
Интегро-дифференцирующее звено
Пропорционально-интегральный регулятор (пи-регулятор)
2.5. Неминимально-фазовые звенья
2.6. Эквивалентные преобразования структурных схем линейных сау
2.7. Передаточные функции многоконтурных систем
3. Анализ устойчивости линейныхсау
3.1.Понятие устойчивости линейных систем
3.2.Алгебраический критерий устойчивости Гурвица
3.3.Частотные критерии устойчивости Михайлова и Найквиста
3.5.Оценка устойчивости по логарифмическим амплитудно- и фазо-частотным характеристикам
3.6.Устойчивость систем с запаздыванием
4. Качество динамических характеристик сау
4.1. Показатели качества процесса регулирования
4.2. Частотные критерии качества
4.3. Корневые критерии качества
4.4. Интегральные критерии качества
5.1. Стационарные режимы сау. Передаточные функции статических и астатических систем
5.2. Коэффициенты ошибки системы
5.3. Системы комбинированного управления
6. Анализ сау в пространстве состояния
6.1. Основные положения метода переменных состояния
6.2. Способы построения схем переменных состояния
Метод прямого программирования
Метод параллельного программирования
Метод последовательного программирования
6.3. Решение уравнений состояния линейных стационарных сау. Вычисление фундаментальной матрицы
Последовательные корректирующие звенья
Параллельные корректирующие звенья
7.2. Частотный метод синтеза корректирующих устройств
Построение лах в низкочастотном диапазоне
Построение лах в среднечастотном диапазоне
Зависимость колебательности от значений hи h1
Построение лах в высокочастотном диапазоне
7.3. Последовательные корректирующие устройства
7.4. Параллельные корректирующие устройства
7.5. Техническая реализация корректирующих звеньев
Пассивные четырехполюсники постоянного тока
Пассивные корректирующие четырехполюсники
Активные корректирующие звенья
Активные четырехполюсники постоянного тока
8. Нелинейные системы автоматического управления
8.1. Особенности нелинейных систем и методы их анализа
8.2. Исследование нелинейных систем на фазовой плоскости
8.3. Метод гармонической линеаризации нелинейных звеньев
Коэффициенты гармонической линеаризации типовых нелинейностей
8.5. Методы определения параметров автоколебаний
Задание для расчета линейной caу
Варианты задания для расчета линейной сау
Варианты передаточных функций линейной сау
Задание для расчета нелинейной сау
Варианты задания для расчета нелинейной сау
Варианты структурных схем нелинейных систем Варианты статических характеристик нелинейного элемента
![]() .
(2.12)
.
(2.12)
Интеграл
правой части равенства называют сверткой
функций
![]() и
и![]() и обозначают:
и обозначают:
![]()
![]()
![]() =
=![]() .
.
Теоремы о предельных значениях. Если
 – оригинал, а
– оригинал, а – его изображение, то
– его изображение, то
![]() ,
(2.13)
,
(2.13)
и
при существовании предела
![]()
![]()
![]() .
(2.14)
.
(2.14)
Теорема разложения. Если изображение сигнала
 представляет
собой дробно-рациональное выражение,
т.е.
представляет
собой дробно-рациональное выражение,
т.е.
![]() ,
,
причем
степень полинома числителя меньше
степени полинома знаменателя и все n
корней
уравнения
![]() простые,
то для нахождения оригинала, соответствующего
изображению
простые,
то для нахождения оригинала, соответствующего
изображению![]() ,
может быть использована формула (формула
разложения):
,
может быть использована формула (формула
разложения):
![]() (2.15)
(2.15)
где
![]() - корень уравнения
- корень уравнения![]() ,
,![]()
![]() .
.
В таблице 2.1 приведены выражения изображения Лапласа для некоторых типовых сигналов.
Таблица 2.1
Изображения по Лапласу типовых сигналов
|
Оригинал
|
Изображение
|
Оригинал
|
Изображение
|
|
δ(t) |
1 |
|
|
|
1(t) |
|
sin( |
|
|
|
|
cos( |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Применяя
преобразование Лапласа к дифференциальному
уравнению
(2.5) и считая
начальные условия нулевыми, получим
следующее операторное
уравнение,
связывающее изображения входного
![]() и выходного
и выходного![]() сигналов
системы:
сигналов
системы:
![]()
![]() ..+
..+![]()
![]() +
+![]() +..+
+..+![]() (2.16)
(2.16)
или
![]() ,
,
где
А(p)
=![]() ;В(р)=
;В(р)=![]() .
.
Введем
в рассмотрение передаточную
функцию
![]() звена (или системы) равную отношению
изображения по Лапласу выходного
сигнала к изображению по Лапласу входного
сигнала при нулевых начальных условиях:
звена (или системы) равную отношению
изображения по Лапласу выходного
сигнала к изображению по Лапласу входного
сигнала при нулевых начальных условиях:
![]() .(2.17)
.(2.17)
Из
выражений (2.16) – (2.17) следует, что
![]() и
и
![]() .
(2.18)
.
(2.18)
Выражение
(рис. 2.18) связывает изображение выходного
сигнала системы с изображением
входного сигнала. Передаточная функция
W(p)
характеризует динамические свойства
САУ, она не зависит от входного сигнала
и полностью определяется коэффициентами
![]() и
и![]() ,
а те, в свою очередь, – параметрами и
структурой системы.
,
а те, в свою очередь, – параметрами и
структурой системы.
Передаточная функция является дробно рациональной функцией относительно оператора преобразования Лапласа:
 .
(2.19)
.
(2.19)
С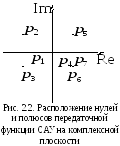 тепень
полинома знаменателя передаточной
функции определяетпорядок
системы.
В реальных системах степень полинома
числителя передаточной функции не
превышает степени полинома знаменателя:
тепень
полинома знаменателя передаточной
функции определяетпорядок
системы.
В реальных системах степень полинома
числителя передаточной функции не
превышает степени полинома знаменателя:
![]() .
Это условие называютфизической
реализуемостью
САУ; оно
означает, что нельзя создать систему,
передаточная функция которой не
удовлетворяла бы этому условию.
.
Это условие называютфизической
реализуемостью
САУ; оно
означает, что нельзя создать систему,
передаточная функция которой не
удовлетворяла бы этому условию.
Корни
полинома числителя передаточной функции
(2.19) называют нулями,
а корни полинома знаменателя –
полюсами
САУ. При анализе САУ нули и полюсы
(особенности
передаточной функции) удобно изображать
точками на плоскости комплексного
переменного
![]() (рис.
2.2).
Так как коэффициенты передаточной
функции
– действительные
числа, то нули и полюсы могут быть только
вещественными (
(рис.
2.2).
Так как коэффициенты передаточной
функции
– действительные
числа, то нули и полюсы могут быть только
вещественными (![]() )
либо комплексно-сопряженными (
)
либо комплексно-сопряженными (![]() и
и![]() )
величинами. Если передаточная функция
звена или системы не содержит особенностей
в правой части плоскости
)
величинами. Если передаточная функция
звена или системы не содержит особенностей
в правой части плоскости![]() ,
то систему называют минимально-фазовой,
в
противном случае ее считают
неминимально-фазовой.
,
то систему называют минимально-фазовой,
в
противном случае ее считают
неминимально-фазовой.
Р ассмотрим
вопросы практического использования
материала, изложенного в предыдущих
параграфах, применительно к несложному
объекту, взятому из электротехники -
ассмотрим
вопросы практического использования
материала, изложенного в предыдущих
параграфах, применительно к несложному
объекту, взятому из электротехники -![]() -цепочке(рис.
2.3).
Входным сигналом такого объекта является
приложенное к цепи напряжение
-цепочке(рис.
2.3).
Входным сигналом такого объекта является
приложенное к цепи напряжение
![]() ,
а выходным сигналом – ток в цепи
,
а выходным сигналом – ток в цепи![]() .Несмотря
на предельную простоту рассматриваемого
объекта, на его примере можно
проиллюстрировать некоторые вопросу,
связанные с классификацией САУ. Очевидно,
что это непрерывная система, построенная
по принципу разомкнутого управления.
Кроме того, полагая, что значения
активного сопротивления и емкости
неизменны, этот объект управления можно
отнести к линейным и стационарным. Если
приложенное напряжение незменно (
.Несмотря
на предельную простоту рассматриваемого
объекта, на его примере можно
проиллюстрировать некоторые вопросу,
связанные с классификацией САУ. Очевидно,
что это непрерывная система, построенная
по принципу разомкнутого управления.
Кроме того, полагая, что значения
активного сопротивления и емкости
неизменны, этот объект управления можно
отнести к линейным и стационарным. Если
приложенное напряжение незменно (![]() ),
то, с точки зрения теории управления,
рассматриваемая электрическая цепь –
это система стабилизации, а если
напряжение изменяется по определенному
закону, например, синусоидальному, то
это система программного управления.
),
то, с точки зрения теории управления,
рассматриваемая электрическая цепь –
это система стабилизации, а если
напряжение изменяется по определенному
закону, например, синусоидальному, то
это система программного управления.
Согласно
второму уравнению Кирхгофа, дифференциалье
уравнение, описывающие рассматриваемую
![]() -
цепочку, имеет следующий вид:
-
цепочку, имеет следующий вид:
![]()
На
основании (2.8) и (2.9) в результате выполнения
преобразование Лапласа над обеими
частями этого уравнения получим следующее
операторное уравнение, связывающее
изображения входного ![]() и
выходного
и
выходного
![]() сигналов объекта:
сигналов объекта:
![]() .
.
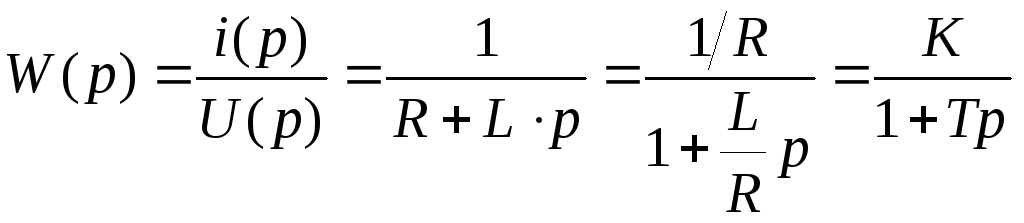
Используя определение передаточной функции (2.17), получаем:
 ,
,
где
![]() – коэффициент усиления, а
– коэффициент усиления, а![]() –
постоянная времени объекта, с. Полученная
передаточная функция соответствует
одному из так называемых типовых звеньев
– апериодическому звену первого порядка.
Нулей такая передаточная функция не
имеет, а для расчета ее полюсов необходимо,
записать характеристическое уравнение
системы, приравняв к нулю полином
знаменателя:
–
постоянная времени объекта, с. Полученная
передаточная функция соответствует
одному из так называемых типовых звеньев
– апериодическому звену первого порядка.
Нулей такая передаточная функция не
имеет, а для расчета ее полюсов необходимо,
записать характеристическое уравнение
системы, приравняв к нулю полином
знаменателя:
![]() .
.
Это алгебраическое уравнение первого порядка имеет единственный действительный корень – полюс передаточной функции:
![]() .
.