Файл: Г.М. Гринфельд ТЕОРИЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ уч. пособие.doc
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 29.07.2024
Просмотров: 592
Скачиваний: 3
СОДЕРЖАНИЕ
1. ОсновНые понятия и определения теории автоматического управления
1.1. Краткие сведения по истории развития систем автоматического управления
1.2. Обобщенная структурная схема сау
2. Математическое описание линейных сау
2.1. Составление и линеаризация дифференциальных уравнений сау
Основные свойства (теоремы) преобразования Лапласа
Изображения по Лапласу типовых сигналов
2.3. Временные и частотные характеристики звеньев и систем
2.4. Элементарные звенья систем автоматического управления
Пропорциональное (усилительное, безинерционное, масштабирующее) звено
Идеальное дифференцирующее звено
Апериодическое звено первого порядка
Реальное дифференцирующее звено
Инерционное звено второго порядка
Интегро-дифференцирующее звено
Пропорционально-интегральный регулятор (пи-регулятор)
2.5. Неминимально-фазовые звенья
2.6. Эквивалентные преобразования структурных схем линейных сау
2.7. Передаточные функции многоконтурных систем
3. Анализ устойчивости линейныхсау
3.1.Понятие устойчивости линейных систем
3.2.Алгебраический критерий устойчивости Гурвица
3.3.Частотные критерии устойчивости Михайлова и Найквиста
3.5.Оценка устойчивости по логарифмическим амплитудно- и фазо-частотным характеристикам
3.6.Устойчивость систем с запаздыванием
4. Качество динамических характеристик сау
4.1. Показатели качества процесса регулирования
4.2. Частотные критерии качества
4.3. Корневые критерии качества
4.4. Интегральные критерии качества
5.1. Стационарные режимы сау. Передаточные функции статических и астатических систем
5.2. Коэффициенты ошибки системы
5.3. Системы комбинированного управления
6. Анализ сау в пространстве состояния
6.1. Основные положения метода переменных состояния
6.2. Способы построения схем переменных состояния
Метод прямого программирования
Метод параллельного программирования
Метод последовательного программирования
6.3. Решение уравнений состояния линейных стационарных сау. Вычисление фундаментальной матрицы
Последовательные корректирующие звенья
Параллельные корректирующие звенья
7.2. Частотный метод синтеза корректирующих устройств
Построение лах в низкочастотном диапазоне
Построение лах в среднечастотном диапазоне
Зависимость колебательности от значений hи h1
Построение лах в высокочастотном диапазоне
7.3. Последовательные корректирующие устройства
7.4. Параллельные корректирующие устройства
7.5. Техническая реализация корректирующих звеньев
Пассивные четырехполюсники постоянного тока
Пассивные корректирующие четырехполюсники
Активные корректирующие звенья
Активные четырехполюсники постоянного тока
8. Нелинейные системы автоматического управления
8.1. Особенности нелинейных систем и методы их анализа
8.2. Исследование нелинейных систем на фазовой плоскости
8.3. Метод гармонической линеаризации нелинейных звеньев
Коэффициенты гармонической линеаризации типовых нелинейностей
8.5. Методы определения параметров автоколебаний
Задание для расчета линейной caу
Варианты задания для расчета линейной сау
Варианты передаточных функций линейной сау
Задание для расчета нелинейной сау
Варианты задания для расчета нелинейной сау
Варианты структурных схем нелинейных систем Варианты статических характеристик нелинейного элемента
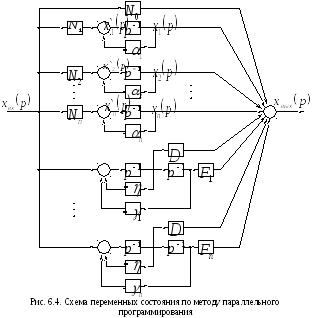
Затем для каждого из слагаемых в выражении (6.12) составляется схема переменных состояния, например, с использованием метода прямого программирования. Далее все (q+ z + 1) таких схем соединяются между собой параллельно. Схема переменных состояния, соответствующая выражению (6.12), представлена на рис. 6.4. Так же, как и в предыдущем случае, переменными состояния являются выходные величины интеграторов.
Метод последовательного программирования
Для построения схем переменных состояния способом последовательного программирования передаточная функция (6.9) в зависимости от числа и вида ее нулей и полюсов должна быть представлена в виде последовательного соединения элементарных звеньев с передаточными функциями вида:
![]() ;
;
![]() ;
;![]() ;
;
 ;
;
 .
.
В
качестве переменных состояния также
выбираются выходные величины интегрирующих
звеньев, выходной сигнал системы
![]() в этом случае
обычно совпадает с переменной состояния
последнего звена.
в этом случае
обычно совпадает с переменной состояния
последнего звена.
В качестве примера рассмотрим описание в пространстве состояния системы (рис. 6.5).
Н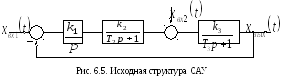 а
основании метода последовательного
программирования составим схему
переменных состояния этой системы (рис.
6.6).
а
основании метода последовательного
программирования составим схему
переменных состояния этой системы (рис.
6.6).
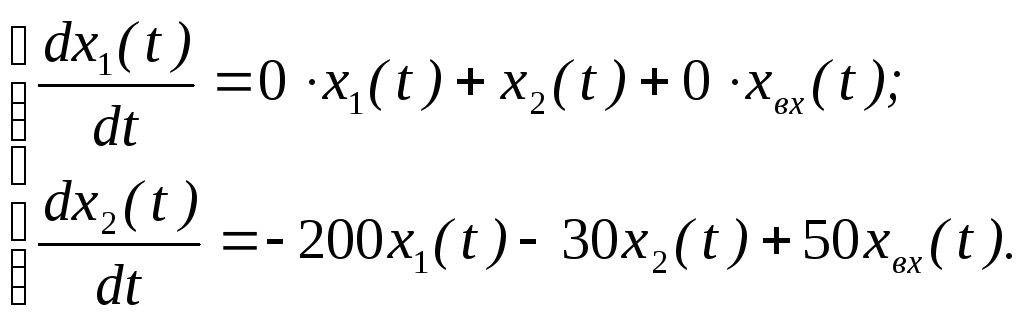
П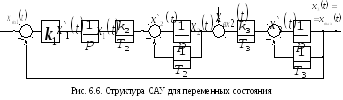 оскольку
в качестве переменных состояния
выбираются выходные величины интегрирующих
звеньев, производные по времени этих
переменных состояния представляют
собой входные сигналы соответствующих
интеграторов. При этом система
дифференциальных уравнений (6.2) для
рассматриваемой САУ имеет следующий
вид:
оскольку
в качестве переменных состояния
выбираются выходные величины интегрирующих
звеньев, производные по времени этих
переменных состояния представляют
собой входные сигналы соответствующих
интеграторов. При этом система
дифференциальных уравнений (6.2) для
рассматриваемой САУ имеет следующий
вид:
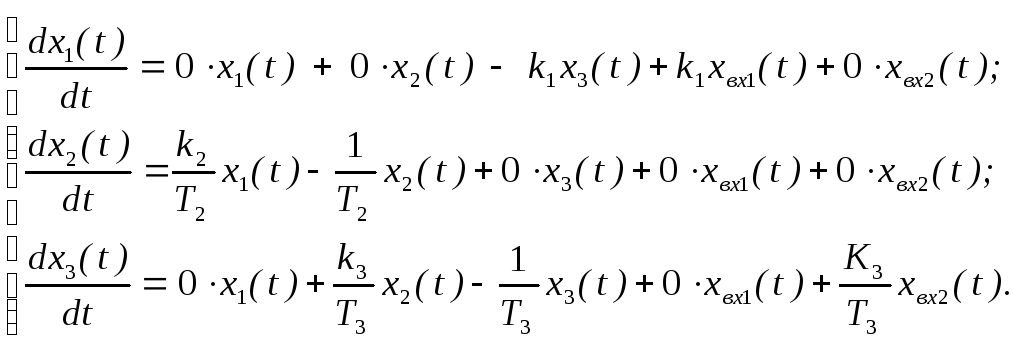 (6.13)
(6.13)
Кроме
того,
![]() или
или
![]() .
(6.14)
.
(6.14)
Тогда выражения (6.13) и (6.14) в матричной форме примут вид:
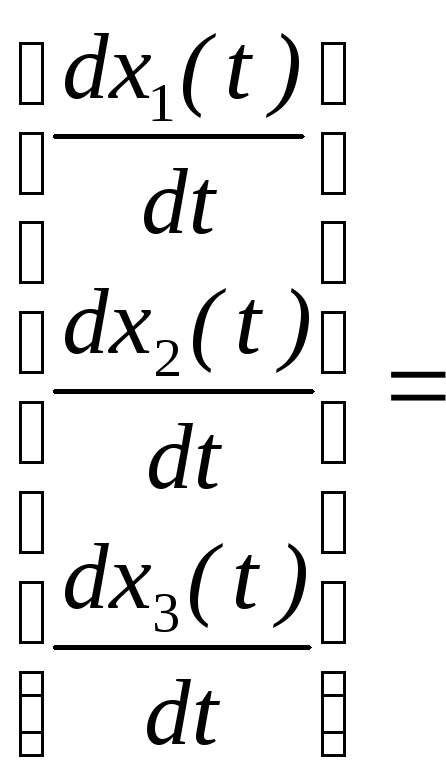
и
 ,
,
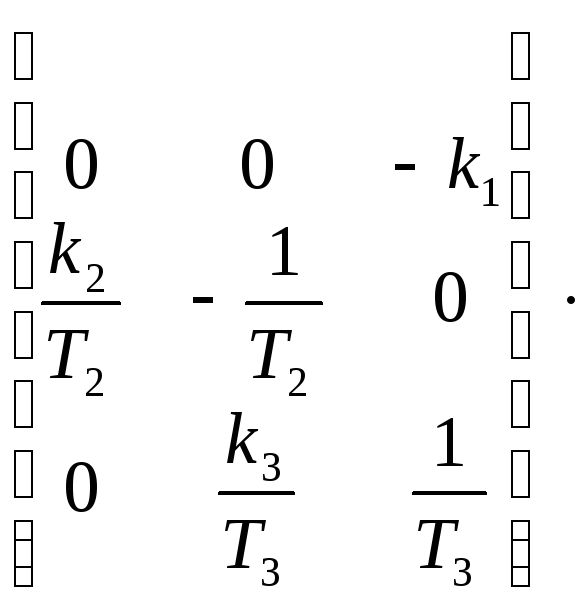
т.е.
для рассматриваемой САУ:
![]()
матрица
системы A
=
 ,
матрица управленияB
=
,
матрица управленияB
=
и
матрица наблюдения
![]() .
.
6.3. Решение уравнений состояния линейных стационарных сау. Вычисление фундаментальной матрицы
Рассмотрим методику решения уравнения состояния линейной стационарной системы, находящейся в свободном движении. При этом внешние воздействия на систему не действуют ( Xвх(t)= 0 ) и поведение системы описывается однородным векторным дифференциальным уравнением:
![]() .
(6.15)
.
(6.15)
Решение этого уравнения ищем в виде:
![]() ,
(6.16)
,
(6.16)
где Ф(t) – фундаментальная матрица; X(t0) – вектор, описывающий состояние системы в начальный момент времени t0 .
Для
стационарных линейных САУ решение
матричного уравнения (6.15) можно получить
по аналогии с решением скалярного
дифференциального уравнения
![]() в виде:
в виде:
![]() ,
(6.17)
,
(6.17)
где
![]() – матричная экспонента.
– матричная экспонента.
Из сравнения выражений (6.16) и (6.17) следует, что фундаментальная матрица равна:
Ф(t) = exp(At). (6.18)
Существует несколько способов определения фундаментальной матрицы.
Первый способ основан на известном разложении экспоненты в ряд. Для выражения (6.18) такое разложение принимает вид:
exp(At)
= 1
+
![]() ,
,
где 1 – единичная матрица.
Указанный способ определения фундаментальной матрицы обычно используется при численных расчетах для фиксированного момента времени t = t0.
При этом
exp(At0)
= 1
+ At0
+ A2
![]() +A3
+A3![]() +…….
+…….
Вычисление подобного выражения для электронных вычислительных машин является стандартной задачей, не представляющей каких-либо затруднений даже для систем высокого порядка.
Второй способ вычисления фундаментальной матрицы предполагает использование аналитического выражения для Ф(t). Для его определения выполним преобразование Лапласа над обеими частями матричного дифференциального уравнения (6.15):
![]() или
или
![]() ,
,
откуда
![]() .
(6.19)
.
(6.19)
Матрица [р1 – А] называется характеристической матрицей, ее определитель
det[p1-A] = 0
представляет собой характеристическое уравнение САУ в матричной форме.
Умножая обе части уравнения (6.19) слева на матрицу [р1–А]-1, обратную по отношению к [р1–А], получим:
X(p) = [р1 – А]-1 X(0).
Выполнив обратное преобразование Лапласа над последним уравнением, имеем
X(t) =L-1{[р1–А]-1} X(0).
Из последнего выражения следует, что фундаментальная матрица равна:
![]() (6.20)
(6.20)
В качестве примера определим фундаментальную матрицу системы, передаточная функция которой равна:
![]() .
(6.21)
.
(6.21)
Преобразуем выражение (6.21) к виду:
![]() .
(6.22)
.
(6.22)
Используя метод
прямого программирования, составляем
для рассматриваемой системы схему
переменных состояния (рис. 6.7), в качестве
которых выбираем выходной сигнал системы
и его первую производную, т.е.
![]() ,
а
,
а![]() .
.
Система дифференциальных уравнений для переменных состояния:
Кроме того,
![]() .
.
Соответствующие приведенной системе дифференциальных уравнений векторные уравнения имеют вид:
 =
= ;
;
![]()
![]() .
.
Т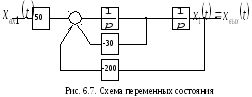 аким
образом, матрицы системы, управления и
наблюдения принимают вид:
аким
образом, матрицы системы, управления и
наблюдения принимают вид:
A ;
B
;
B
![]() ;C
;C
![]() .
.
Характеристическая матрица равна:
 .
.
Матрица, обратная характеристической, равна:
 .
.
В соответствии с выражением (6.20) фундаментальная матрица равна:
![]()
![]() =
=
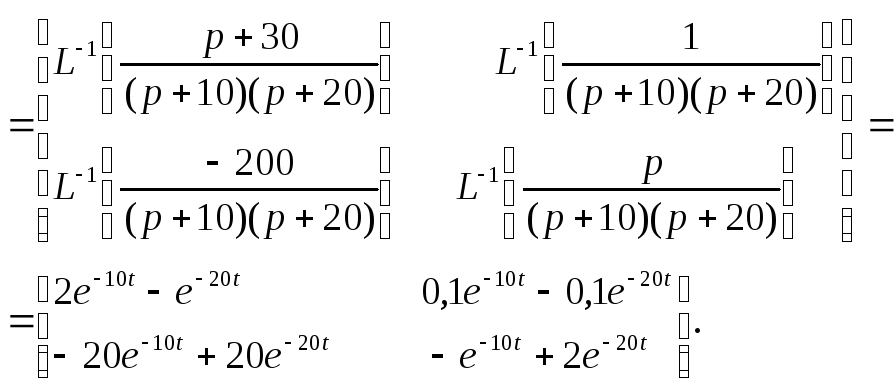 .
.