ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 22.11.2023
Просмотров: 374
Скачиваний: 2
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
кусков груза, высоты и формы скребка, шага цепи. Для пусковых грузов
шаг скребков должен быть больше наибольшего размера куска. Производитель- ность скребкового конвейера равна
Q 3600Bhvk,
где h – высота скребка; Ψ=0,5÷0,6 для мелкосыпучих грузов; Ψ=0,7÷0,8 для крупнокусковых грузов.
Разгрузка конвейеров с нижней рабочей ветвью можно производить в лю- бом месте. Скорость скребковых конвейеров 0,2÷1 м/с. Ширина желоба
В 3...4h . Угол наклона конвейера не более 30º.
Недостатки скребковых конвейеров: измельчение транспортирующего гру- за, быстрое изнашивание желоба, большой расход энергии, трудность транспор- тирования липких и влажных грузов. Мощность скребкового конвейера:
P kQ
360
Co
Lг
Н ,
где k – коэффициент запаса,
Lг – горизонтальная проекция длины конвейера,
Со – коэффициент сопротивления для катковой цепи 0,7÷2,3, для скольжения 1÷4.
Скребковые конвейеры с погруженными скребками имеют меньшие раз- меры и массу. Движение груза в желобе происходит со скоростью меньшей ско- рости цепи. Скорость движения v=0,1÷0,4 м/с, длина – 100 м. высота до 20 м, производительность до 250 т/час.
Объемная производительность равна:
v 3600 AvКп ;
где А – площадь поперечного сечения груза;
Кп – коэффициент производительности, Кп=0,88÷0,99.
Тележечные конвейеры предназначены для транспортирования штучных грузов в поточных линиях сборки машин. Цепи этих конвейеров соединены с те- лежками, передвигающимися на катках по рельсам (рис. 92).
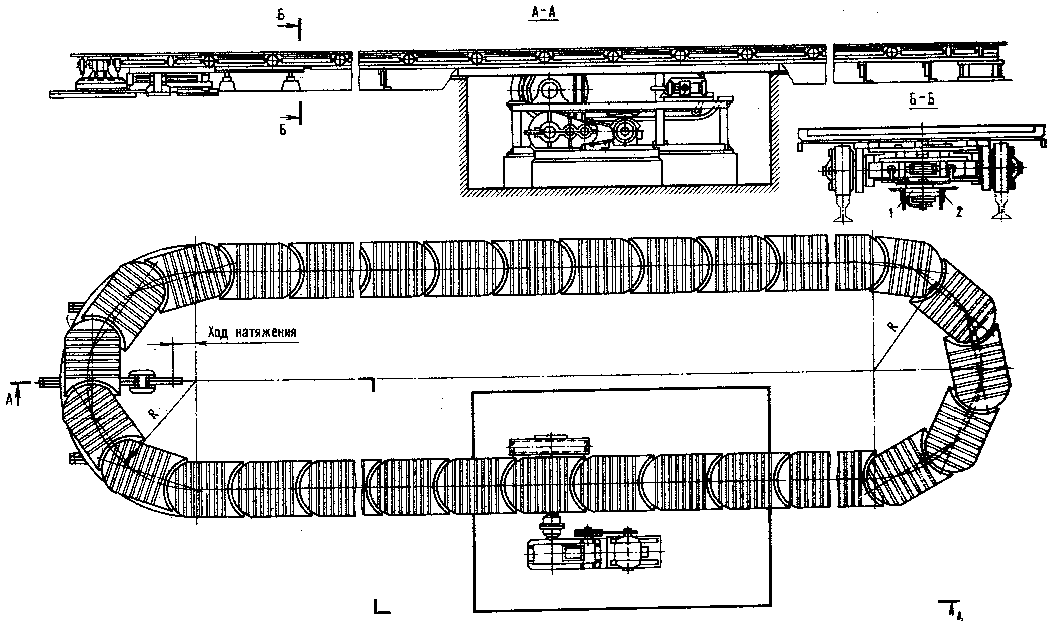
Рис. 92. Схема тележечного конвейера
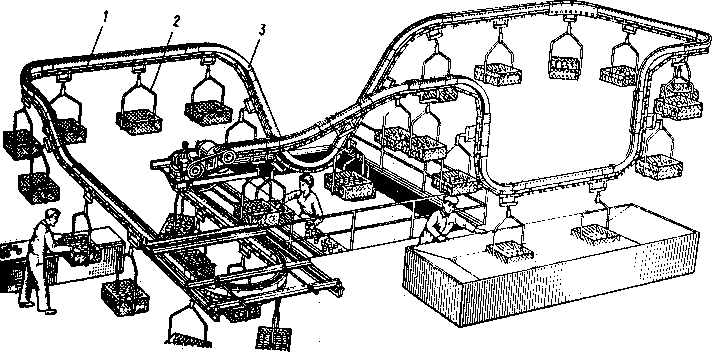
Рис. 93. Схема подвесного конвейера
Движение тележек может быть пульсирующим или непрерывным.
Подвесные цепные конвейеры обеспечивают транспортирование грузов по сложной пространственной трассе. Подвесной конвейер состоит из замкнутого тягового органа 1 с каретками, служащими для поддержки тягового элемента и прикрепления подвесок 2 (рис. 93). Каретки перемещаются по подвесному пути 3, выполненные из двутавров. Тяговым элементом может быть цепь или канат.
По характеру соединения тягового элемента различают грузонесущий кон- вейер (рис. 94 а). Толкающие (рис. 94 б) и грузоведущие (рис. 94 в).
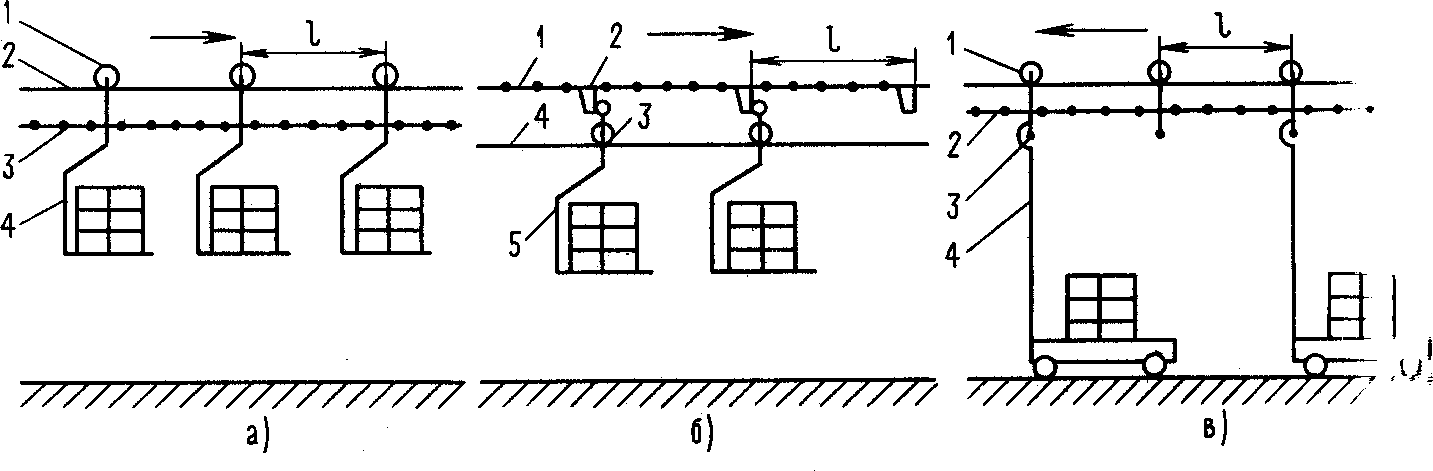
Рис. 94. Схемы подвесных конвейеров:
а – грузонесущий, б – толкающий, в - грузоведущий
Для подвесных конвейеров используются угловые и гусеничные приводы.
Скорость движения грузов v=0,1÷45 м (минимальная масса грузов до 2,5 т длина 500-600 м.
Сопротивление движению цепного конвейера складывается из сопротив- ления на прямолинейном участке.
F cG,
где G – общая нагрузка на катки от веса движущихся частей конвейера и груза;
с – коэффициент сопротивления движению.
fd1 2 К p
c ;
dк
здесь Кр=1,1÷1,4.
При скольжении стальных цепей по стальным направляющим с=0,25÷0,35. Нагрузка на катки
G q qo gl,
где q, qо – соответственно распределенная масса груза и рабочих элементов (цепей, скребков).
Для подвесных конвейеров с=0,015…0,027. Для пластинчатых конвейеров с неподвижными бортами дополнительное сопротивление от трения груза будет
равно
Fтр fh2 ke,
где
k v2 1,21 sin
– коэффициент, учитывающий уменьшение го-
ризонтального давления груза на борт конвейера.
Для скребковых конвейеров коэффициент сопротивления перемещению груза по желобу равен
с 1,1 f .
При транспортировании угля – с=0,7…1,0.
Коэффициент сопротивления движению цепи со скребками и ходовыми катками на подшипниках – с=0,1…0,13. Для цепей без катков с=0,25…0,4.
Сопротивление на разгрузочном участке ковшового конвейера
Fразгр
где mк – масса ковша;
2mк qtк gf ,
tк – шаг расположения ковшей.
Сопротивление сил трения в опорах звездочек
F Nf
do ,
зв
зв
D
где N – усилие, действующее на опоры вала звездочек; Dзв – начальный диаметр звездочек.
do – диаметр цапфы.
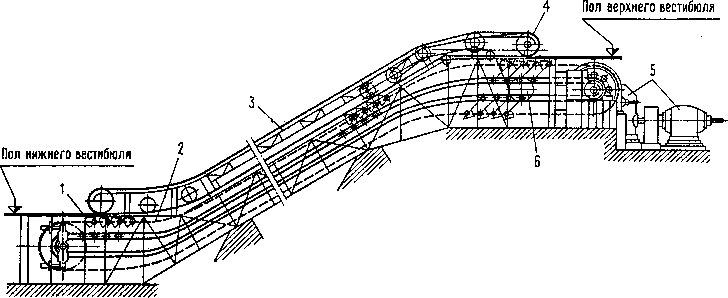
Эскалатор является специальным цепным конвейером, предназначенным для транспортировки людей под углом 30о (рис. 95).
Несущим элементом являются ступени, закрепленные с обоих сторон на тяговых цепях. Каждая ступень имеет четыре направляющих катка. Перемещаю- щихся по направляющим путям. Скорость движения эскалатора v=0,7…1 м/с. Ширина полотна составляет 1000, 660, и 625 мм. Производительность эскалатора
где tст – шаг ступени;
z – число пассажиров;
Q 3600
zv ,
tст
φ – коэффициент заполнения.
Рис. 95. Схема эскалатора
Распределенная эксплуатационная нагрузка на 1 м длины полотна
G 325 АВ g,
tст
где А и В – соответственно глубина и ширина ступени. Пусковые характеристики проверяют по максимальной нагрузке
Gmax 1,35Gэ .
Шаговый конвейер содержит неподвижную раму опирающуюся на фунда- мент и подвижную раму, опирающуюся на ролики. Конвейер содержит два при- вода: подъема груза и передвижения груза (рис. 96). Принцип работы основан на подъеме и перемещении груза. Движение осуществляется периодически и син- хронно. Горизонтальный ход составляет 2-3 м, а вертикальный подъем – 50 мм. Скорость движения 10 м/мин.
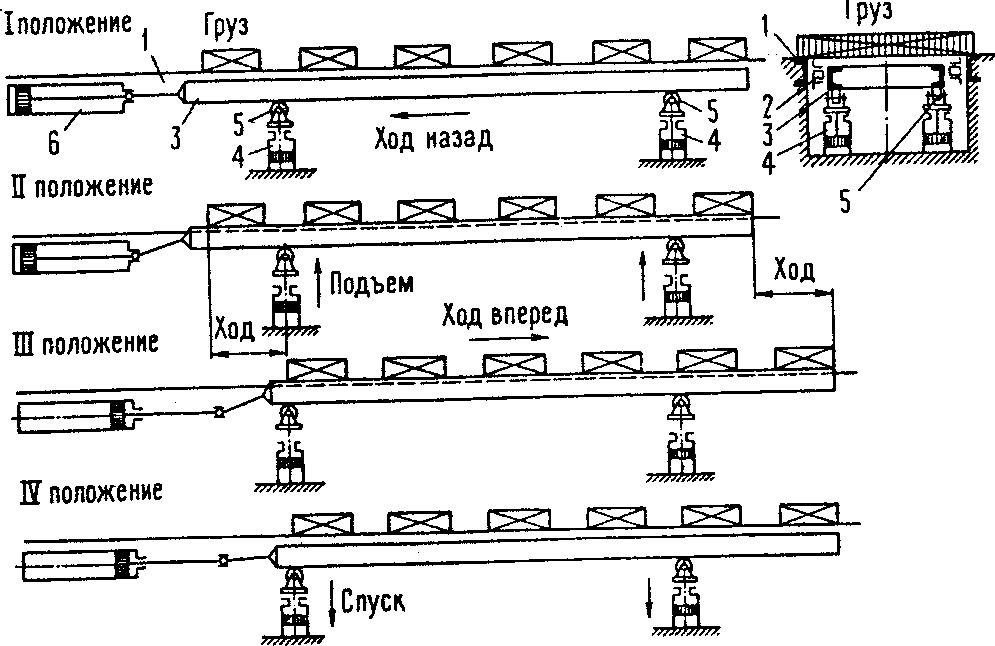
Рис. 96. Схема шагающего конвейера
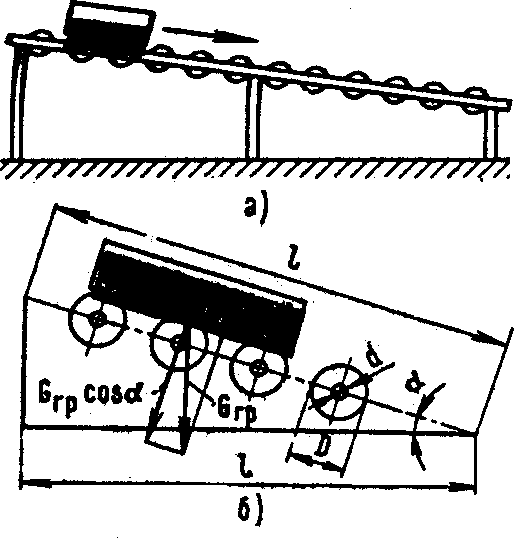
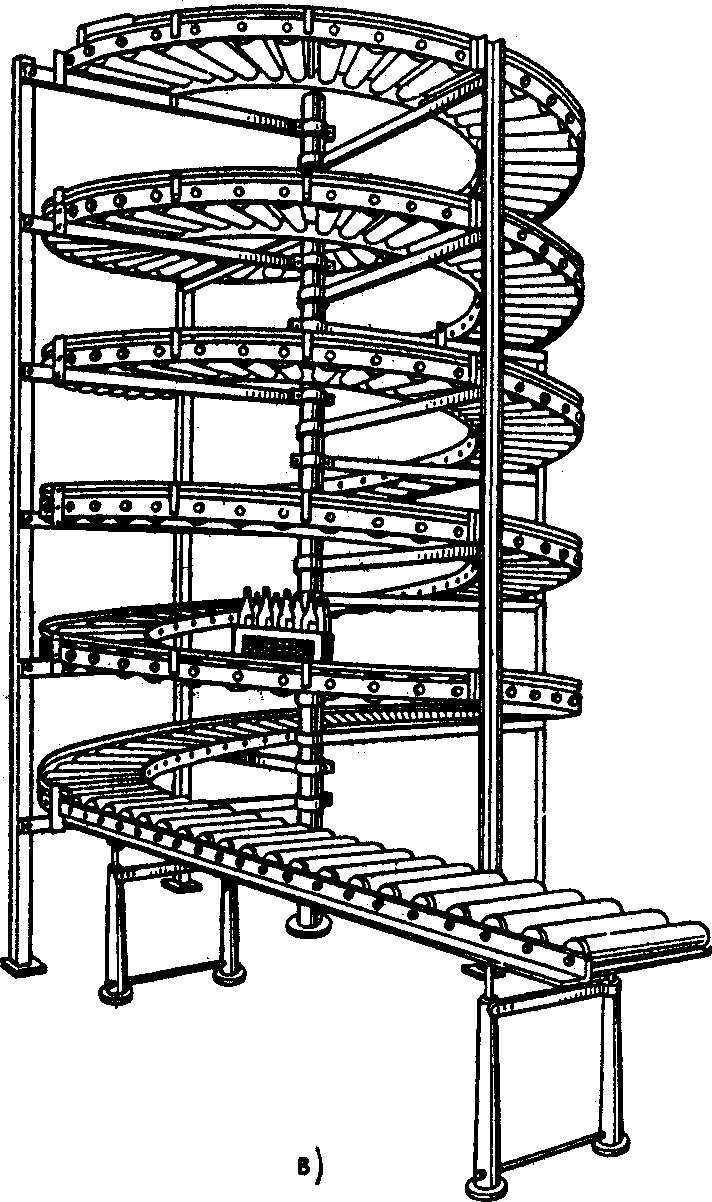 Простейшим гравитационным конвейером является наклонная плоскость или желоб, по которому скатывается груз. Вместо желоба устанавливают ролики (рис. 97).
Простейшим гравитационным конвейером является наклонная плоскость или желоб, по которому скатывается груз. Вместо желоба устанавливают ролики (рис. 97).
Рис. 97. Роликовый конвейер:
а – схема; б – схема действия сил; в – спиральный роликовый спуск Угол наклона роликов α=2÷7º, а для тюков α=12÷14º.
Эти конвейеры применяют для транспортирования всех видов насыпных грузов, кроме липких. Их используют обычно для перемещения грузов на не- большие расстояния, особенно для перемещения ядовитых, горячих грузов при обеспечении полной герметичности.
Вибрационный конвейер имеет желоб, подвешенный или опертый на не- подвижную раму с помощью упругих элементов. Под действием специального привода
желоб совершает колебательные движения, вследствие чего груз отрыва-
ется от желоба, а затем падает, так, что движение происходит одно за другим в виде микропролетов (рис. 98).
При таком движении груз не разрушается, не образует пыль и практически не изнашивает желоб. Частота вибраций желоба до 50 гц.
Возбудителем колебаний является инерционные, электромагнитные, экс- центриковые и поршневые вибровозбудители.
Большим достоинством конвейеров является малый износ несущего эле- мента, простота конструкции, малый расход электроэнергии, герметичность груза.
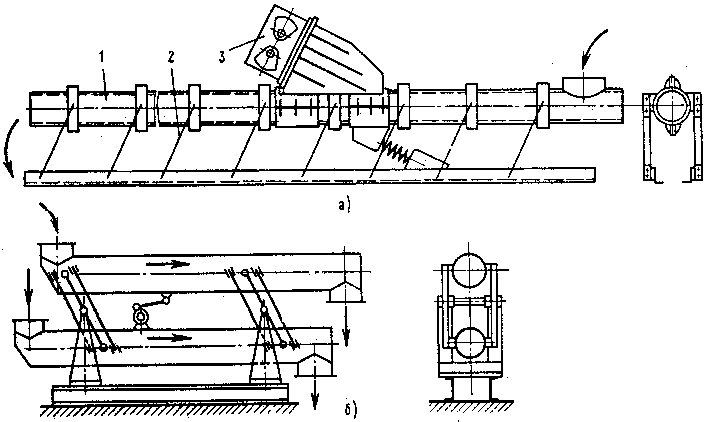
Рис. 98. Схема вибрационного конвейера:
а – одномассного; б – двухмассного уравновешенного
Недостатки: значительное снижение производительности при транспор- тировании вверх, малая долговечность упругих элементов привода и опорных подшипников привода.
Большое распространение получили конвейеры выполненные по уравно- вешенной резонансной схеме. Конвейер состоит из двух труб и желобов, пред- ставляющих собой динамически уравновешенную систему. Упругая система настраивается в резонанс. Такая система при установившемся колебательном движении при отсутствии потерь энергии может колебаться неограниченное вре- мя без поступления энергии из вне, а при малых потерях энергии требует для поддержания колебательного движения лишь незначительные усилия при малой мощности привода. Производительность горизонтальных конвейеров 600 т/ч при длине до 100 м. Скорость трассирования насыпных грузов в значительной степени зависит от их физико-механических свойств, размеров и формы частиц и других факторов. v=0,1…0,3 м/с. Угол наклона вибрационных конвейеров обычно не превышает 15º. Для пылевидных грузов угол наклона конвейера – 5º. Амплитуда колебаний – 0,1…2 мм.
Мощность привода вибрационных конвейеров при длине более ё10 м рав-
на
шаг скребков должен быть больше наибольшего размера куска. Производитель- ность скребкового конвейера равна
Q 3600Bhvk,
где h – высота скребка; Ψ=0,5÷0,6 для мелкосыпучих грузов; Ψ=0,7÷0,8 для крупнокусковых грузов.
Разгрузка конвейеров с нижней рабочей ветвью можно производить в лю- бом месте. Скорость скребковых конвейеров 0,2÷1 м/с. Ширина желоба
В 3...4h . Угол наклона конвейера не более 30º.
Недостатки скребковых конвейеров: измельчение транспортирующего гру- за, быстрое изнашивание желоба, большой расход энергии, трудность транспор- тирования липких и влажных грузов. Мощность скребкового конвейера:
P kQ
360
Co
Lг
Н ,
где k – коэффициент запаса,
Lг – горизонтальная проекция длины конвейера,
Со – коэффициент сопротивления для катковой цепи 0,7÷2,3, для скольжения 1÷4.
Скребковые конвейеры с погруженными скребками имеют меньшие раз- меры и массу. Движение груза в желобе происходит со скоростью меньшей ско- рости цепи. Скорость движения v=0,1÷0,4 м/с, длина – 100 м. высота до 20 м, производительность до 250 т/час.
Объемная производительность равна:
v 3600 AvКп ;
где А – площадь поперечного сечения груза;
Кп – коэффициент производительности, Кп=0,88÷0,99.
Тележечные конвейеры предназначены для транспортирования штучных грузов в поточных линиях сборки машин. Цепи этих конвейеров соединены с те- лежками, передвигающимися на катках по рельсам (рис. 92).
Рис. 92. Схема тележечного конвейера
Рис. 93. Схема подвесного конвейера
Движение тележек может быть пульсирующим или непрерывным.
Подвесные цепные конвейеры обеспечивают транспортирование грузов по сложной пространственной трассе. Подвесной конвейер состоит из замкнутого тягового органа 1 с каретками, служащими для поддержки тягового элемента и прикрепления подвесок 2 (рис. 93). Каретки перемещаются по подвесному пути 3, выполненные из двутавров. Тяговым элементом может быть цепь или канат.
По характеру соединения тягового элемента различают грузонесущий кон- вейер (рис. 94 а). Толкающие (рис. 94 б) и грузоведущие (рис. 94 в).
Рис. 94. Схемы подвесных конвейеров:
а – грузонесущий, б – толкающий, в - грузоведущий
Для подвесных конвейеров используются угловые и гусеничные приводы.
Скорость движения грузов v=0,1÷45 м (минимальная масса грузов до 2,5 т длина 500-600 м.
Сопротивление движению цепного конвейера складывается из сопротив- ления на прямолинейном участке.
F cG,
где G – общая нагрузка на катки от веса движущихся частей конвейера и груза;
с – коэффициент сопротивления движению.
fd1 2 К p
c ;
dк
здесь Кр=1,1÷1,4.
При скольжении стальных цепей по стальным направляющим с=0,25÷0,35. Нагрузка на катки
G q qo gl,
где q, qо – соответственно распределенная масса груза и рабочих элементов (цепей, скребков).
Для подвесных конвейеров с=0,015…0,027. Для пластинчатых конвейеров с неподвижными бортами дополнительное сопротивление от трения груза будет
равно
Fтр fh2 ke,
где
k v2 1,21 sin
– коэффициент, учитывающий уменьшение го-
ризонтального давления груза на борт конвейера.
Для скребковых конвейеров коэффициент сопротивления перемещению груза по желобу равен
с 1,1 f .
При транспортировании угля – с=0,7…1,0.
Коэффициент сопротивления движению цепи со скребками и ходовыми катками на подшипниках – с=0,1…0,13. Для цепей без катков с=0,25…0,4.
Сопротивление на разгрузочном участке ковшового конвейера
Fразгр
где mк – масса ковша;
2mк qtк gf ,
tк – шаг расположения ковшей.
Сопротивление сил трения в опорах звездочек
F Nf
do ,
зв
зв
D
где N – усилие, действующее на опоры вала звездочек; Dзв – начальный диаметр звездочек.
do – диаметр цапфы.
Эскалатор является специальным цепным конвейером, предназначенным для транспортировки людей под углом 30о (рис. 95).
Несущим элементом являются ступени, закрепленные с обоих сторон на тяговых цепях. Каждая ступень имеет четыре направляющих катка. Перемещаю- щихся по направляющим путям. Скорость движения эскалатора v=0,7…1 м/с. Ширина полотна составляет 1000, 660, и 625 мм. Производительность эскалатора
где tст – шаг ступени;
z – число пассажиров;
Q 3600
zv ,
tст
φ – коэффициент заполнения.
Рис. 95. Схема эскалатора
Распределенная эксплуатационная нагрузка на 1 м длины полотна
G 325 АВ g,
tст
где А и В – соответственно глубина и ширина ступени. Пусковые характеристики проверяют по максимальной нагрузке
Gmax 1,35Gэ .
§4. Транспортирующие машины без тягового элемента
Шаговый конвейер содержит неподвижную раму опирающуюся на фунда- мент и подвижную раму, опирающуюся на ролики. Конвейер содержит два при- вода: подъема груза и передвижения груза (рис. 96). Принцип работы основан на подъеме и перемещении груза. Движение осуществляется периодически и син- хронно. Горизонтальный ход составляет 2-3 м, а вертикальный подъем – 50 мм. Скорость движения 10 м/мин.
Рис. 96. Схема шагающего конвейера
§5. Гравитационные устройства
Простейшим гравитационным конвейером является наклонная плоскость или желоб, по которому скатывается груз. Вместо желоба устанавливают ролики (рис. 97).Рис. 97. Роликовый конвейер:
а – схема; б – схема действия сил; в – спиральный роликовый спуск Угол наклона роликов α=2÷7º, а для тюков α=12÷14º.
§6. Вибрационные конвейеры
Эти конвейеры применяют для транспортирования всех видов насыпных грузов, кроме липких. Их используют обычно для перемещения грузов на не- большие расстояния, особенно для перемещения ядовитых, горячих грузов при обеспечении полной герметичности.
Вибрационный конвейер имеет желоб, подвешенный или опертый на не- подвижную раму с помощью упругих элементов. Под действием специального привода
желоб совершает колебательные движения, вследствие чего груз отрыва-
ется от желоба, а затем падает, так, что движение происходит одно за другим в виде микропролетов (рис. 98).
При таком движении груз не разрушается, не образует пыль и практически не изнашивает желоб. Частота вибраций желоба до 50 гц.
Возбудителем колебаний является инерционные, электромагнитные, экс- центриковые и поршневые вибровозбудители.
Большим достоинством конвейеров является малый износ несущего эле- мента, простота конструкции, малый расход электроэнергии, герметичность груза.
Рис. 98. Схема вибрационного конвейера:
а – одномассного; б – двухмассного уравновешенного
Недостатки: значительное снижение производительности при транспор- тировании вверх, малая долговечность упругих элементов привода и опорных подшипников привода.
Большое распространение получили конвейеры выполненные по уравно- вешенной резонансной схеме. Конвейер состоит из двух труб и желобов, пред- ставляющих собой динамически уравновешенную систему. Упругая система настраивается в резонанс. Такая система при установившемся колебательном движении при отсутствии потерь энергии может колебаться неограниченное вре- мя без поступления энергии из вне, а при малых потерях энергии требует для поддержания колебательного движения лишь незначительные усилия при малой мощности привода. Производительность горизонтальных конвейеров 600 т/ч при длине до 100 м. Скорость трассирования насыпных грузов в значительной степени зависит от их физико-механических свойств, размеров и формы частиц и других факторов. v=0,1…0,3 м/с. Угол наклона вибрационных конвейеров обычно не превышает 15º. Для пылевидных грузов угол наклона конвейера – 5º. Амплитуда колебаний – 0,1…2 мм.
Мощность привода вибрационных конвейеров при длине более ё10 м рав-
на