ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 22.11.2023
Просмотров: 375
Скачиваний: 2
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
МИНИСТЕРСТВО НАУКИ И ВЫСШЕГО ОБРАЗОВАНИЯ РОССИЙСКОЙ ФЕДЕРАЦИИ
ИНСТИТУТ СФЕРЫ ОБСЛУЖИВАНИЯ И ПРЕДПРИНИМАТЕЛЬСТВА (ФИЛИАЛ)
ФЕДЕРАЛЬНОГО ГОСУДАРСТВЕННОГО БЮДЖЕТНОГО ОБРАЗОВАТЕЛЬНОГО УЧРЕЖДЕНИЯ ВЫСШЕГО ПРОФЕССИОНАЛЬНОГО ОБРАЗОВАНИЯ
«ДОНСКОЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ» (ИСО и П (ФИЛИАЛ)ДГТУ)
УТВЕРЖДАЮ
Заведующий кафедрой Т и ТАТ
Б.Ю.Калмыков
«31 » августа 2019 г.
На правах рукописи
Подъёмно-транспортные устройства транспортно-технологических комплексов
Конспект лекций для изучению дисциплины Электронный образовательный ресурс
Для студентов всех формы обучения направления 23.04.03 «Эксплуатация транспортно-технологических машин и комплексов» (магистерская программа
«Техническая эксплуатация автомобильного транспорта).
Автор (составитель): д.т.н., профессор В.А. Рыжиков Рассмотрено и рекомендовано для исполь-
зования в учебном процессе на 2019/2020 – уч.г. на заседании кафедры Т и ТАТ
Протокол № 14 от 03.07.2019 г.
Шахты 2019
СОДЕРЖАНИЕ
стр
-
Грузоподъемные машины 4
§1. Простейшие грузоподъемные устройства 4
§2. Подъемники 11
§3. Грузоподъемные краны 16
Краны мостового типа 16
Краны стрелового типа 28
Специальные краны 34
Погрузчики 36
-
Общие положения расчета грузоподъемных машин 38
§1. Основные параметры грузоподъемных машин 38
§2. Расчет нагрузки 40
-
Грузозахватные устройства 41
§1. Крюки и петли 41
Крюки 41
Петли 44
§2. Специальные захваты 45
§3. Грузозахватные устройства для насыпных грузов 48
-
Грузовые и тяговые гибкие элементы, полиспасты, бара- баны, блоки 50
§1. Гибкие элементы 50
§2. Полиспасты 51
§3. Барабаны и блоки 52
-
Тормозные устройства 54
§1. Остановы 54
§2. Тормоза 55
-
Механизм подъема груза 58
§1. Схема механизма подъема 58
§2. Расчет механизма подъема 58
-
Механизм изменения вылета стрелы 63 -
Механизм передвижения 66
§1. Конструкции механизмов передвижения 66
§2. Сопротивление передвижению 68
§3. Процессы неустановившегося движения 69
§4. Расчет ходовых колес 70
-
Механизм поворота 70
§1. Определение моментов сопротивления в опорах крана 71
§2. Устройство безопасности ГПМ 73
§3. Устойчивость кранов против опрокидывания 90
-
Транспортирующие машины 93
§1. Ленточные конвейеры 94
Ленточные конвейеры общего назначения с резинотканевой лентой 96
§2. Расчет ленточный конвейеров 100
§3. Цепные конвейеры 103
§4. Транспортирующие машины без тягового элемента 110
§5. Гравитационные устройства 111
§6. Вибрационные конвейеры 111
§7. Винтовые конвейеры 113
§8. Вспомогательные устройства к конвейерам 114
-
Список используемой литературы 116
- 1 2 3 4 5 6 7 8 9 ... 18
Грузоподъёмные машины
Грузоподъёмные машины и механизмы предназначены для перемещения грузов и людей в вертикальной и горизонтальной плоскостях на небольшие расстояния. Они относятся к устройствам циклического действия, работающих в повторно-кратковременном режиме. Основными параметрами грузоподъём- ных машин являются грузоподъёмность, скорость движения отдельных меха- низмов, режимы работы, производительность, высота подъёма, пролёт, вылет и т.п.
Грузоподъёмные машины можно разделить на три группы: простейшие устройства для подъёма грузов, подъёмники и краны. Грузоподъемные машины состоят из привода рабочих механизмов, металлоконструкции и грузозахватного устройства.
§1. Простейшие грузоподъёмные устройства
К простейшим устройствам для подъёма грузов являются домкраты, ле- бёдки, тали и однорельсовые тележки.
Домкраты применяются для подъёма на небольшую высоту (0,8-1,0 м), которые могут быть с ручным или машинным приводом. Различают домкраты механические (винтовые, рычажно-реечные, зубчато-реечные) и гидравличе- ские.
Винтовой домкрат с ручным приводом на салазках, облегчающих его точную установку под грузом (рис.1,а.). Винтовые домкраты имеют самотормо- зящую резьбу, что предотвращает самопроизвольное опускание груза, однако вследствие этого КПД винтовых домкратов весьма низкий 0,3…0,4. Подъёмный стальной винт 5 ввёрнут в гайку 3, укреплённую в корпусе 4 домкрата. На верхней части винта установлена рифлёная головка 1, которая может поворачи- ваться относительно винта. Вращение винта 5 производят рукояткой 2 с дву- сторонней храповой собачкой 9. В зависимости от установки собачки изменя- ется направление вращения винта. Корпус домкрата в нижней части имеет опорную плиту-гайку, перемещающуюся по направляющим салазкам при вра- щении винта 6 горизонтального перемещения. Вращение этого винта произво- дят рукояткой 7, снабжённой собачкой 8. Грузоподъёмность винтовых домкра- тов не более 20т.
Гидравлические домкраты имеют высокий КПД 0,75…0,8, малые габа- риты и массу. Они обеспечивают плавный подъём и спуск груза при точной его остановке в необходимом положении. Грузоподъёмность гидравлических домкратов может превышать 200т. Недостатками их являются небольшая высо-
та подъёма груза и малые скорости. Гидравлический домкрат с ручным приво- дом (рис. 1,б) имеет скалку 15, снабжённую в верхней части упорной головкой
10. Скалка входит в цилиндрическую часть корпуса 14, в нижнюю часть кото- рого под скалку плунжерным насосом 13 через систему отверстий и клапанов
подаётся рабочая жидкость. Плунжерный насос работает от рукоятки 11, при качании которой перемещается его плунжер 12. Для опускания скалки необхо- димо отклонить рукоятку 11 за пределы рабочего положения (вправо на рис. 1,б). При этом открывается обратный клапан, и жидкость под действием веса груза перемещается в резервуар. Уменьшая или увеличивая угол отклонения рукоятки, изменяют степень открытия отверстия обратного клапана и регули- руют скорость опускания груза. Скорость подъема груза при ручном приводе весьма невелика. При большой высоте подъема и большой грузоподъемности гидравлические домкраты выполняют с машинным приводом.
Лебедки. Основное назначение лебедок – подъем, опускание и подтяги- вание грузов. Лебедки могут быть использованы как самостоятельные меха- низмы для выполнения подъемно – транспортных операций при погрузочно – разгрузочных, ремонтных и строительно – монтажных работах, а также как сборочные единицы различных подъемных устройств (кранов, подъемников и т. п.).
Лебедки классифицируют по следующим основным признакам: по типу привода – с ручным и машинным приводом (от электрических двигателей и т. п.); по типу тягового элемента – канатные и цепные; по типу установки - ста- ционарные (устанавливаемые на полу, стене, потолочном перекрытии) и пере- движные (монтируемые на рельсовых или безрельсовых тележках, перемеща- ющихся по полу или подвесным путям); по числу барабанов – одно -, двух – и многобарабанные и безбарабанные (рычажные).
Стационарная канатная лебёдка с приводом от фланцевого электро- двигателя
переменного тока показана на рис.2. Электродвигатель 4 закреплён на корпусе редуктора 3. Быстроходный вал редуктора соединён с валом двига- теля зубчатой муфтой, расположенной внутри корпуса редуктора. На свобод- ном конце вала двигателя установлен тормозной шкив 5 колодочного тормоза с приводом от электрогидравлического толкателя. Выходной вал редуктора со- единён с валом барабана 1, на котором жёстко закреплён конец каната. При включении двигателя приводится во вращение барабан лебёдки; при этом в за- висимости от направления вращения ротора двигателя канат, к которому при- креплён груз, наматывается на барабан или разматывается, производя подъём или опускание груза. Изменение направления вращения барабана достигается реверсированием электродвигателя.
На втором конце быстроходного вала редуктора установлен электроин- дукционный (вихревой) тормоз 2 типа ТМ-4, предназначенный для плавного регулирования скорости опускания груза.
Лебёдки с ручным приводом применяют при ненапряжённых условиях работы (малая грузоподъёмность и скорость подъёма груза). В этих лебёдках вращение барабана осуществляется с помощью приводных рукояток с тормо- зом, автоматически стопорящим барабан при прекращении вращения. Ручные лебёдки бывают однобарабанные и без барабана (рычажные).
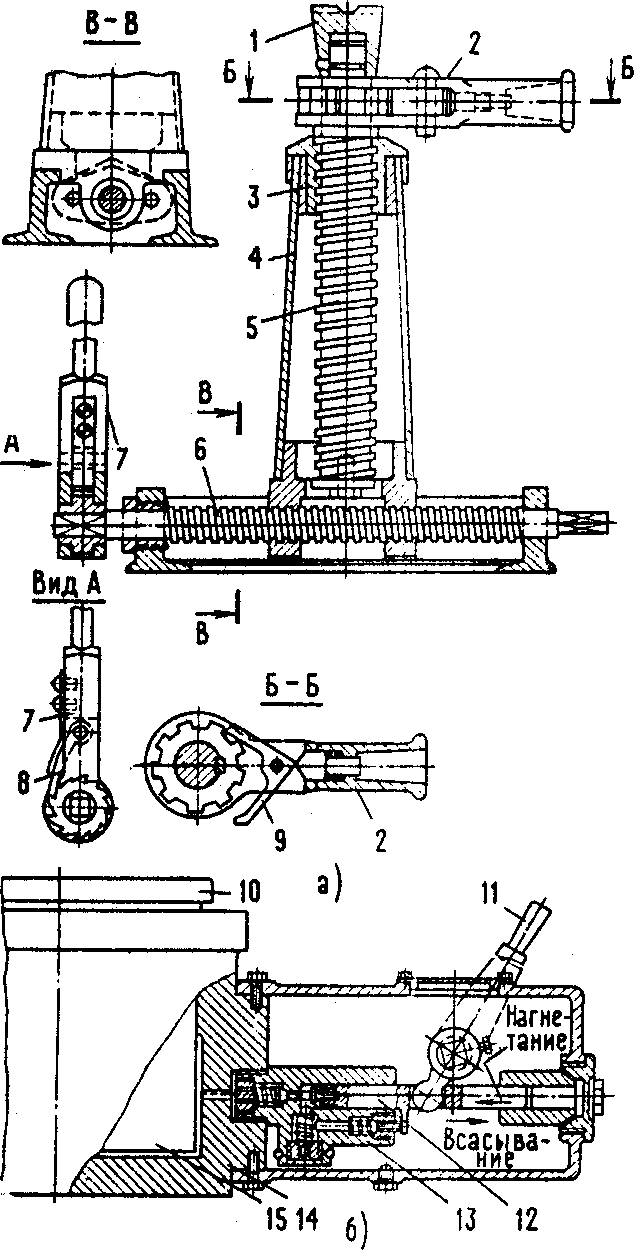
Рис. 1. Домкраты: а – винтовой; б - гидравлический
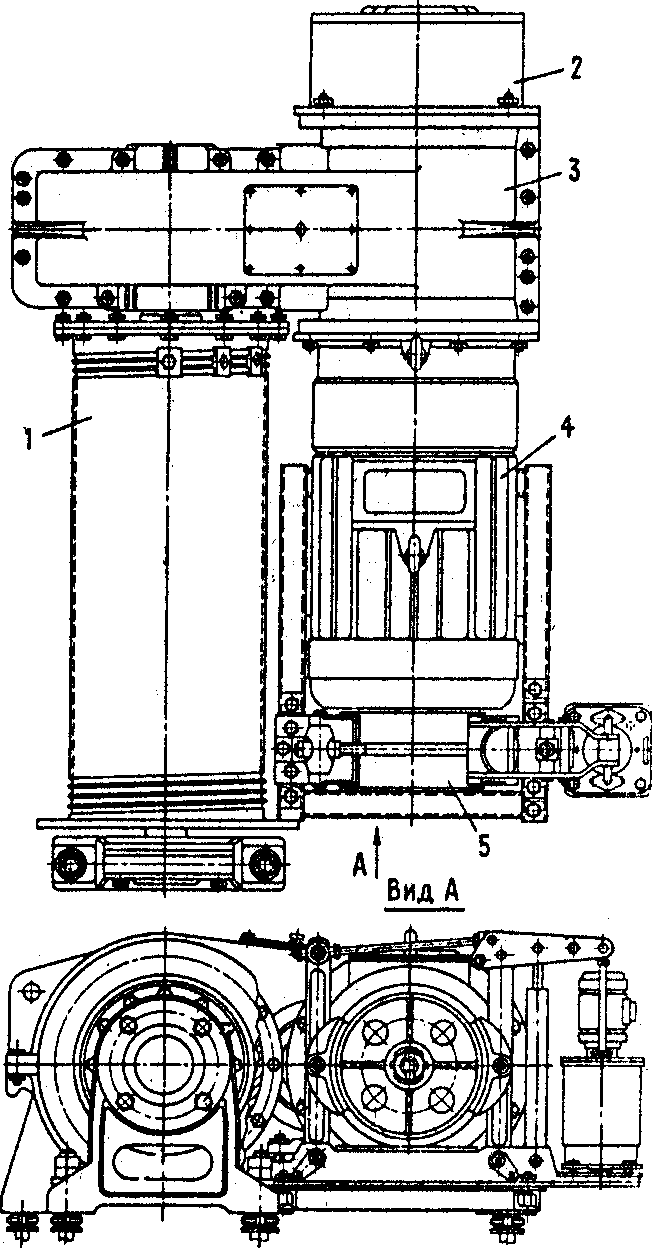
Рис. 2. Лебедка с электроприводом
Лебёдки с канатоведущим шкивом (рис.3) находят применение в пасса- жирских лифтах. Канатоведущий шкив 1 имеет кольцевые канавки-ручьи, в кото- рые входят ветви каната, и передача тягового усилия осуществляется силой тре- ния, возникающей между канатом и поверхностью ручья. По типу передачи от электродвигателя к канатоведущему шкиву лебёдки лифтов могут быть редук- торные и безредукторные. В редукторных лебедках вал шкива вращается с меньшей частотой, чем вал электродвигателя, благодаря применению зубчатых или червячных передач. В безредукторнх лебёдках канатоведущий шкив и шкив тормозного устройства размещены