ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 22.11.2023
Просмотров: 371
Скачиваний: 2
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
Рис. 65. Схемы механизмов изменения вылета: а – реечный; б – винтовой; в – гид- равлический; г – секторный; д – секторно-кривошипный; е – кривошипно-шатунный
Реечный механизм наиболее легкий и простой в изготовлении. Винтовой механизм сложней в изготовлении. Гидравлический механизм обеспечивает плав- ную работу. Секторный механизм обеспечивает равномерную угловую скорость.
Кривошипно-шатунный механизм надежен и безопасен в работе. Расчет механизма сводится к определению усилия на исполнительном механизме и мощ- ности двигателя.
Для разгрузки привода момент от веса стрелы Gс уравновешивают момен- том от веса стрелового противовеса Gпр расположенного на стреле (рис. 66).
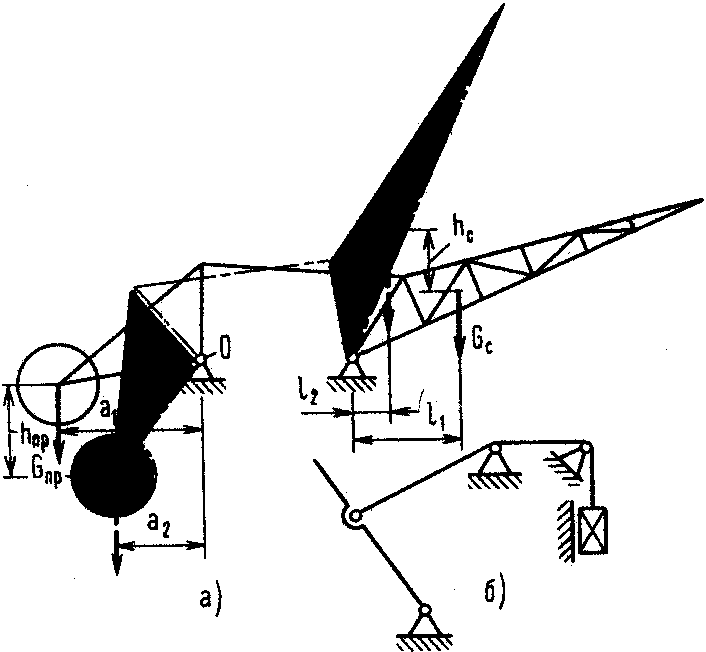
Рис. 66. Схема уравновешивания массы стрелы
При применении стрел с устройством выравнивающим траекторию движе- ния груза, мощность двигателя механизма изменения вылета расходуется главным образом на преодоление сил трения в шарнирах укосины и блоков.
На рис 67 показаны схемы выравнивающих устройств.
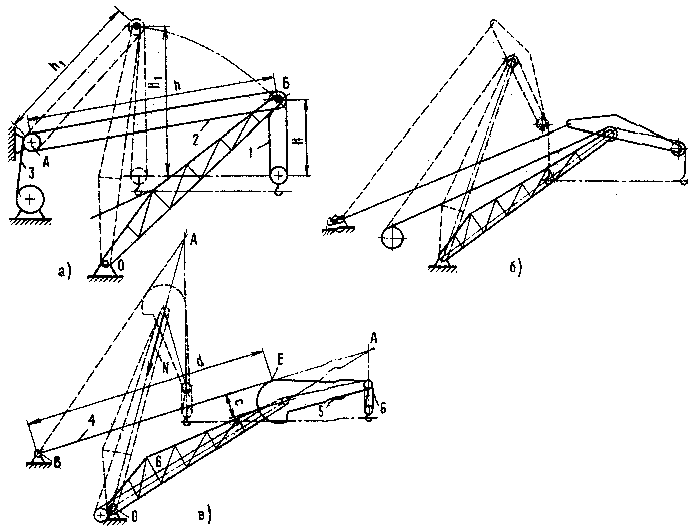
Рис. 67. Схемы устройств обеспечения горизонтального перемещения груза при изменении вылета качением стрелы: а – уравнительным полиспастом;
б – консольным хоботом; в – профилированным хоботом
В системе с уравнительным полиспастом (рис 67, а) подъемный канат 3 проходит через грузовой полиспаст 1 и уравнительный полиспаст 2. Подбирая ме- сто расположения обоймы А относительно оси поворота стрелы О соотношение кратностей полиспастов, можно получить практически горизонтальное переме- щение груза при изменении вылета стрелы. Эта система отличается простым кон- структивным исполнением и хорошей компоновкой при монтаже. В системе с шарнирно-сочлененными укосинами стрела снабжена консольным прямолиней- ным хоботом (рис. 67, б). Размеры элементов укосины выбирают из условия обес- печения достаточно пологой траектории движения конца хобота. При профилиро- ванном хоботе с гибкой оттяжкой канат 4, огибающий криволинейную часть хо- бота 5, закреплен одним концом на нем. При повороте хобота оттяжкой канат 4
огибает криволинейную часть хобота, что приводит к смещению точки касания Е. Подъемный канат 6, при качании стрелы не перемещается по блокам.
Механизм изменения вылета стрелы, аналогично механизму подъема, снабжают тормозами нормально-замкнутого типа, автоматически размыкающи- мися при включении привода.
- 1 ... 6 7 8 9 10 11 12 13 ... 18
Механизмы передвижения
§1. Конструкции механизмов передвижения
Механизмы передвижения предназначены для передвижения крана или те- лежки по горизонтали. Механизмы передвижения бывают с приводными колеса- ми и канатной или цепной тягой.
Краны и крановые тележки опираются на ходовые колеса. Колеса соедине- ны с приводом, являются приводными, а остальные холостыми. Иногда все ходо- вые колеса являются приводными. Механизмы передвижения кранов могут быть выполнены с тихоходным или быстроходным трансмиссионным валом U с раз- дельным приводом (рис. 68).
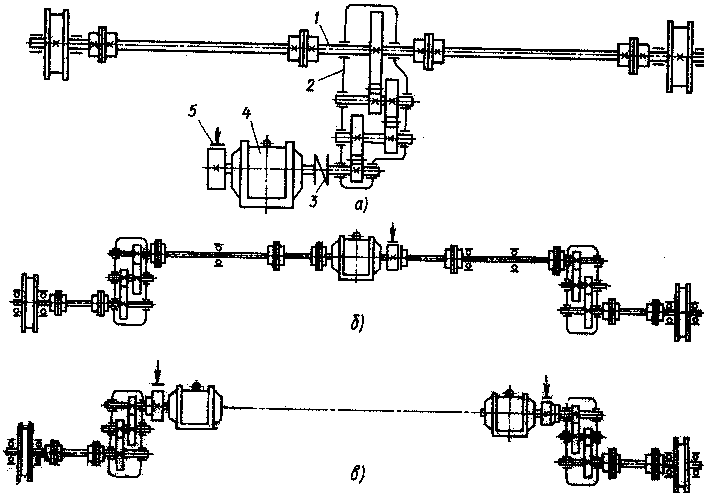
Рис. 68. Схемы механизмов передвижения кранов: а, б – соответственно с тихо- ходным и быстроходным трансмиссионным валом; в – с раздельным приводом
Механизм передвижения с тихоходным валом имеет привод, установлен- ный в средней части моста и состоящий из двигателя 4, муфты 3 и редуктора 2. Выходной вал редуктора связан с трансмиссионным валом 1, выполненным из от- дельных секций, которые соединены муфтами и установлены на подшипниках, закрепленных на мосту крана. Посредством муфт трансмиссионный вал также со- единен с валами приводных ходовых колес, Тормоз 5 устанавливают на муфте или на свободном конце вала двигателя. Этот механизм обладает повышенной надежностью.
Механизм передвижения с быстроходным трансмиссионным валом имеет два редуктора, установленных около концевых балок моста крана. Этот механизм имеет небольшую массу при повышенной жесткости металлоконструкции моста крана.
 Механизм передвижения с раздельным приводом не имеет трансмиссион- ного вала. В этом механизме каждая концевая балка моста приводится в движение индивидуальным приводом. При этом между приводами, расположенными на различных концевых балках, не предусмотрено никакой связи. Этот привод обес-
Механизм передвижения с раздельным приводом не имеет трансмиссион- ного вала. В этом механизме каждая концевая балка моста приводится в движение индивидуальным приводом. При этом между приводами, расположенными на различных концевых балках, не предусмотрено никакой связи. Этот привод обес-
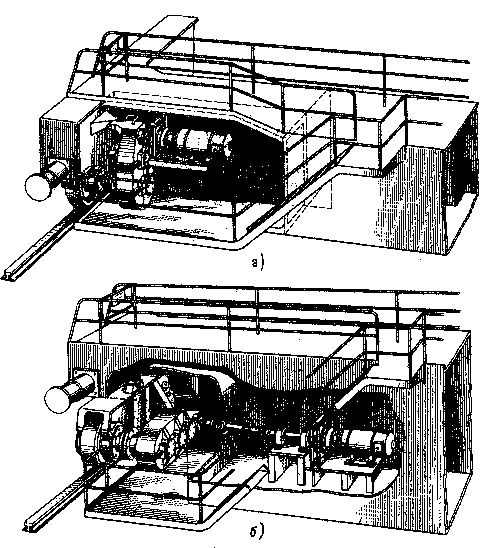 печивает нормальную работу кранов при отношении крана к его базе при На рис. 69 показаны различные установки привода.
печивает нормальную работу кранов при отношении крана к его базе при На рис. 69 показаны различные установки привода.L B 6 .
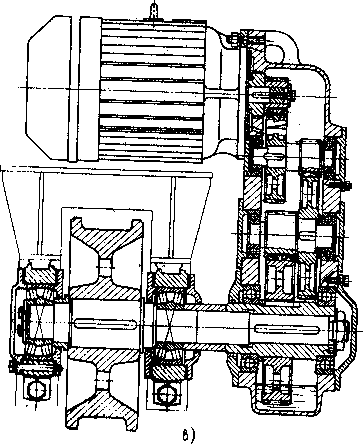
Рис. 69. Установка раздельного привода: а – с вертикальным редуктором, б – с горизонтальным редуктором, в – фланцевым электродвигателем.
Ходовые колеса мостов кранов выполняют двухребордными или безре- бордными.
Поверхность катания ходового колеса может быть цилиндрической или конической с уклоном обода 1:20.ходовые колеса с коническим ободом применя- ются в механизмах передвижения с центральным приводом и двумя ведущими колесами. В этом случае применяют подкрановые рельсы типа КР или Р со скруг- ленной головкой.
Число ходовых колес моста зависит от грузоподъемности и пролета крана. В кранах небольшой грузоподъемности применяют четыре ходовых колеса, буксы которых прикреплены непосредственно к концевым балкам. В кранах большой грузоподъемности число колес увеличивается и для равномерного их нагружения их устанавливают попарно на балансировках.
Механизм передвижения тележек мостовых кранов аналогичен механизму передвижения крана с тихоходным валом. Широкое применение находят одно- рельсовые тележки, перемещающиеся по нижнему или верхнему поясу подвесно- го пути.
§2. Сопротивление передвижению
При передвижении тележки или моста крана по рельсам двигатель меха- низма передвижения преодолевает сопротивления сил трения, сил инерции, вет- ровой нагрузки и сопротивления движению при возможном уклоне пути.
Общий момент сопротивления передвижению

М Gгр
G
fd 2 К р ,
где G – собственный вес тележки; Gгр – вес груза;
d – диаметр цапфы;
f – коэффициент трения в опоре колеса;
µ – коэффициент трения качения колеса по рельсу. Кр – коэффициент трения реборд.
Сопротивление передвижению, приведенное к окружности качения колеса диаметром Dх.к
W Gгр
D
G 2
х.к
fd К р
Wв ,
где Wв – ветровая нагрузка на кран или тележку. Момент сопротивления, приведенный к валу двигателя
с
М М
WDx.к ,
iмм 2iмм
где iм, ηм – соответственно передаточное число и к.п.д. от вала колеса до вала двигателя.
Следует также учитывать сопротивление передвижению при уклоне пути
Wукл
Gгр
-
G ,
где α – уклон пути. α=0,001÷0,005.
Для кранов с безребордными ходовыми колесами полное усилие сопро- тивления, приведенное к оси ходового колеса
W Gгр
D
G 2
х.к
fd Sn
Dp
2 p
f pd p ,
где Dр, dр – диаметры поверхности катания соответственно направляющего ролика и цапфы оси ролика;
µр, fр – коэффициенты соответственно трения качения и трения в под- шипнике ролика;
Sn – боковые нагрузки.
Sn
f Gгр
G.