ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 04.02.2024
Просмотров: 532
Скачиваний: 1
СОДЕРЖАНИЕ
1.Основное уравнение движения электропривода.
2.Основные понятия об устойчивости электропривода.
3.Определение времени пуска и торможения электропривода
6.Расчет нагрузочных диаграмм и тахограмм.
8.Расчет и выбор мощности двигателей при длительном режиме работы
10.Механические характеристики двигателей постоянного тока последовательного возбуждения.
11.Способы торможения двигателей постоянного тока последовательного возбуждения.
12.Способы регулирования скорости двигателей постоянного тока независимого возбуждения.
13.Способы регулирования скорости двигателей постоянного тока независимого возбуждения.
15.Расчет тормозных сопротивлений двигателя постоянного тока независимого возбуждения (RДТ, RП).
17.Расчет пусковых сопротивлений в приводах с двигателями постоянного тока независимого возбуждения.
19.Каскадные схемы включения АД. Регулирование скорости асинхронных двигателей в системе АВК.
20.Расчет ступени противовключения для асинхронного двигателя.
21.Торможение асинхронного двигателя противовключением.
22.Регулирование скорости асинхронных двигателей.
23.Расчет пусковых сопротивлений асинхронных двигателей.
26.Регулирование скорости путем шунтирования обмотки якоря.
27.Расчет и выбор основного электрооборудования вентильного электропривода.
28.Механические характеристики вентильного электропривода.
30.Выпрямительный и инверторный режим работы тиристорного электропривода постоянного тока.
31.Управление выпрямленным напряжением в системе ТП-Д.
32.Регулирование скорости двигателей в системе ТП-Д. Расчет механических характеристик.
33.Регулирование выпрямленного напряжения в системе ТП-Д.
34.Энергетические характеристики системы ТП-Д
36.Регулирование скорости в системе ТПЧ-АД
37.Регулирование скорости в системе ТПЧ-СД.
38.Переходные процессы при пуске двигателя
39.Механические характеристики синхронных двигателей. Пуск в ход и торможение синхронных двигателей.
40.Особенности пуска синхронных двигателей. Разновидности схем пуска синхронных двигателей.
Где:
 ;
; ;
; .
.При проверке на перегрузочную способность значение максимального момента на валу двигателя за время цикла работы сравнивается со значением номинального момента двигателя, причем:
где:
10.Механические характеристики двигателей постоянного тока последовательного возбуждения.
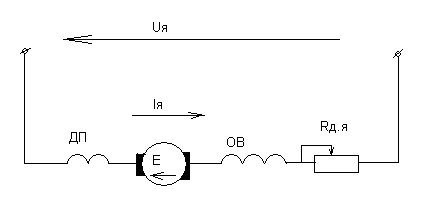
Рисунок 1 – Схема включения двигателя постоянного тока последовательного возбуждения.
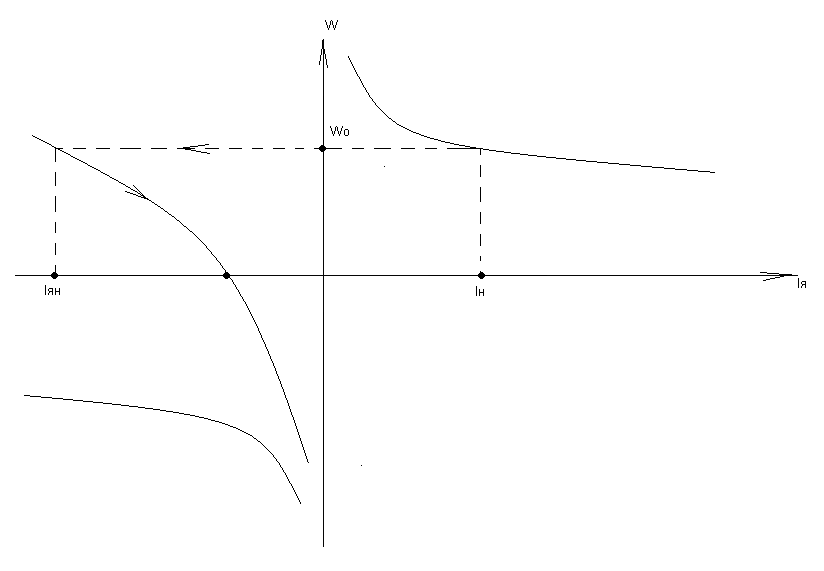
Для двигателя последовательного возбуждения уравнение механической характеристики имеет вид:

И электромеханическая:
И имеет следующий вид:

Вид характеристики – гиперболический – показывает, что при уменьшении момента скорость двигателя неограниченно возрастает. Физически это объясняется условиями электрического равновесия: при
Аналогичный вид имеет и электромеханическая характеристика. Практически в области номинальной нагрузки машина насыщается и увеличение
11.Способы торможения двигателей постоянного тока последовательного возбуждения.
Существует три способа торможения двигателей постоянного тока последовательного возбуждения:
-
Динамическое торможение с самовозбуждением; -
Динамическое торможение с питанием сериесной обмотки от постороннего источника; -
Торможение противовключением.-
Динамическое торможение с самовозбуждением.
-
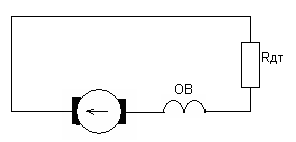
Режим динамического торможения для таких двигателей отличается от аналогичного режима для двигателей постоянного тока с независимым возбуждением тем, что тормозной момент зависит от потока, который зависит от тока якоря. Следовательно, жесткость характеристики, с уменьшением скорости и ЭДС, будет уменьшаться (интенсивность торможения не постоянна).

Достоинство данного метода состоит в простоте исполнения.
Недостатки метода:
-
При уменьшении скорости тормозной момент уменьшается значительно быстрее, чем скорость; -
При малых скоростях торможение получается малоэффективным.
Торможение противовключением.
Такой режим возможен, когда электродвигатель включен для вращения в одну сторону, а под действием момента нагрузки якорь двигателя вращается в противоположную сторону (генераторный режим). Этот режим можно получить переключением обмоток якоря на ходу.
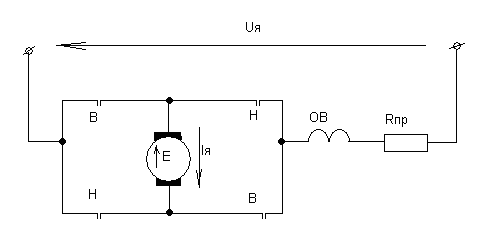
При переключении «В» на «Н» изменится направление IЯ , и следовательно направление момента
Для ограничения тока якоря вводится RПР.
При этом бросок IЯ ограничен значением IЯ.max. RПР определяется из:
В момент равенства w=0 необходимо отключить двигатель от сети. В этом режиме:
-
Динамическое торможение с питанием сериесной обмотки от постороннего источника.
На обмотку возбуждения подается напряжение такой полярности, чтобы Е не изменяла своего знака. Якорь замыкается на сопротивление динамического торможения и режим полностью аналогичен режиму динамического торможения двигателей постоянного тока с независимым напряжением. Последовательно с обмоткой возбуждения включается сопротивление.

12.Способы регулирования скорости двигателей постоянного тока независимого возбуждения.

Рисунок - Схема включения двигателя постоянного тока независимого возбуждения.
Многие производственные механизмы требуют регулирования скорости вращения двигателей. Под регулированием скорости следует понимать принудительное изменение скорости путем воздействия на различные параметры электропривода с целью получения требуемых механических характеристик.
Для оценки различных способов регулирования скорости существуют следующие параметры:
-
Диапазон регулирования: это соотношение
это соотношение  к
к  , при которых работа привода при существующих нагрузках будет устойчивой;
, при которых работа привода при существующих нагрузках будет устойчивой; -
Плавность регулирования – характеризуется числом устойчивых скоростей, получаемых в данном диапазоне регулирования; -
Экономичность регулирования. Оцениваются капитальные затраты, потери электроэнергии; -
Направление возможного регулирования. Вверх или вниз от скорости, определяемой естественной характеристикой.
Запишем уравнение электромеханической характеристики:
 ,
,из которого следует, что изменять скорость двигателей можно воздействуя на следующие параметры:
-
 - введение в цепь якоря
- введение в цепь якоря  ;
; -
Изменением магнитного потока Ф; -
Изменением напряжения, подводимого к якорю .
.