ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 04.02.2024
Просмотров: 524
Скачиваний: 1
СОДЕРЖАНИЕ
1.Основное уравнение движения электропривода.
2.Основные понятия об устойчивости электропривода.
3.Определение времени пуска и торможения электропривода
6.Расчет нагрузочных диаграмм и тахограмм.
8.Расчет и выбор мощности двигателей при длительном режиме работы
10.Механические характеристики двигателей постоянного тока последовательного возбуждения.
11.Способы торможения двигателей постоянного тока последовательного возбуждения.
12.Способы регулирования скорости двигателей постоянного тока независимого возбуждения.
13.Способы регулирования скорости двигателей постоянного тока независимого возбуждения.
15.Расчет тормозных сопротивлений двигателя постоянного тока независимого возбуждения (RДТ, RП).
17.Расчет пусковых сопротивлений в приводах с двигателями постоянного тока независимого возбуждения.
19.Каскадные схемы включения АД. Регулирование скорости асинхронных двигателей в системе АВК.
20.Расчет ступени противовключения для асинхронного двигателя.
21.Торможение асинхронного двигателя противовключением.
22.Регулирование скорости асинхронных двигателей.
23.Расчет пусковых сопротивлений асинхронных двигателей.
26.Регулирование скорости путем шунтирования обмотки якоря.
27.Расчет и выбор основного электрооборудования вентильного электропривода.
28.Механические характеристики вентильного электропривода.
30.Выпрямительный и инверторный режим работы тиристорного электропривода постоянного тока.
31.Управление выпрямленным напряжением в системе ТП-Д.
32.Регулирование скорости двигателей в системе ТП-Д. Расчет механических характеристик.
33.Регулирование выпрямленного напряжения в системе ТП-Д.
34.Энергетические характеристики системы ТП-Д
36.Регулирование скорости в системе ТПЧ-АД
37.Регулирование скорости в системе ТПЧ-СД.
38.Переходные процессы при пуске двигателя
39.Механические характеристики синхронных двигателей. Пуск в ход и торможение синхронных двигателей.
40.Особенности пуска синхронных двигателей. Разновидности схем пуска синхронных двигателей.
13.Способы регулирования скорости двигателей постоянного тока независимого возбуждения.

Рисунок - Схема включения двигателя постоянного тока независимого возбуждения.
Многие производственные механизмы требуют регулирования скорости вращения двигателей. Под регулированием скорости следует понимать принудительное изменение скорости путем воздействия на различные параметры электропривода с целью получения требуемых механических характеристик.
Для оценки различных способов регулирования скорости существуют следующие параметры:
-
Диапазон регулирования: это соотношение
это соотношение  к
к  , при которых работа привода при существующих нагрузках будет устойчивой;
, при которых работа привода при существующих нагрузках будет устойчивой; -
Плавность регулирования – характеризуется числом устойчивых скоростей, получаемых в данном диапазоне регулирования; -
Экономичность регулирования. Оцениваются капитальные затраты, потери электроэнергии; -
Направление возможного регулирования. Вверх или вниз от скорости, определяемой естественной характеристикой.
Запишем уравнение электромеханической характеристики:
 ,
,из которого следует, что изменять скорость двигателей можно воздействуя на следующие параметры:
-
 - введение в цепь якоря
- введение в цепь якоря  ;
; -
Изменением магнитного потока Ф; -
Изменением напряжения, подводимого к якорю .
.
-
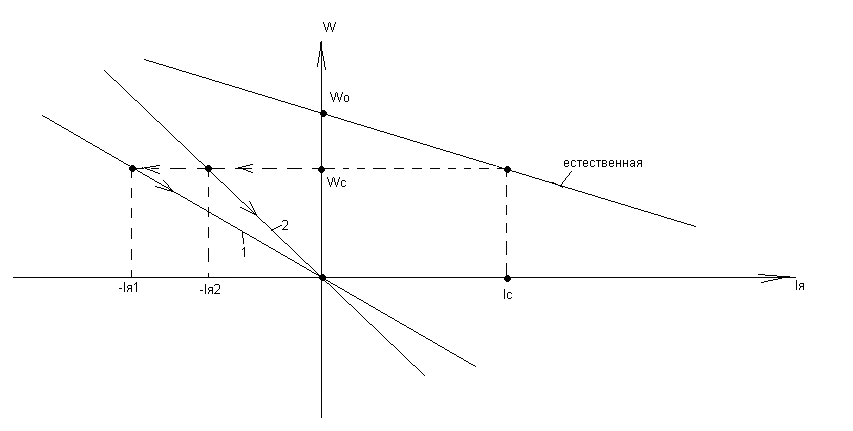
Регулирование скорости изменением сопротивления якорной цепи.


Р
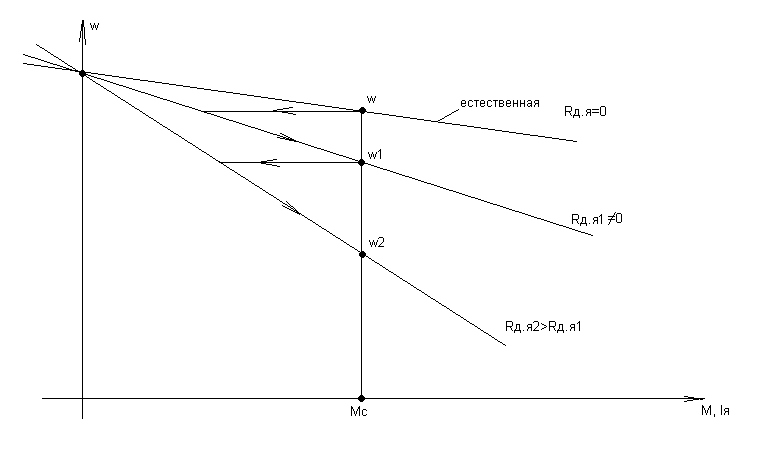
егулирование скорости введением

Оценим приведенный способ регулирования:
-
Диапазон регулирования не превышает 3:1, т.к. работа при низких скоростях нестабильна незначительное изменение МС может вызвать остановку двигателя. С уменьшением МС уменьшается диапазон регулирования; -
Регулирование ступенчатое; -
Регулировать можно только вниз от основной скорости.
II. Регулирование скорости изменением магнитного потока.

Отметим, что изменение Ф возможно лишь в сторону уменьшения, т.е. в режиме, близком к номинальному, магнитная система двигателя насыщена. Уменьшение Ф<ФН приводит к увеличению
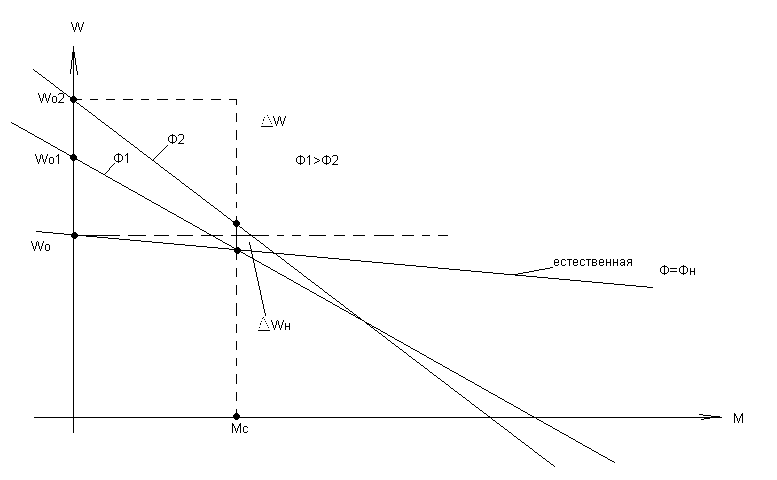
Т.к.
Оценим заданный способ регулирования:
-
Диапазон регулирования для большинства двигателей (1,5…2):1 -
Для двигателя независимого возбуждения можно обеспечить плавное регулирование. -
Регулирование экономичное, т.к. капитальные затраты и потер при этом невелики из-за невысокой мощности цепи возбуждения. -
Регулирование w возможно только вверх от основной скорости.
-
Регулирование скорости изменением подводимого напряжения.
При изменении подводимого напряжения изменяется лишь скорость идеального Х.Х.
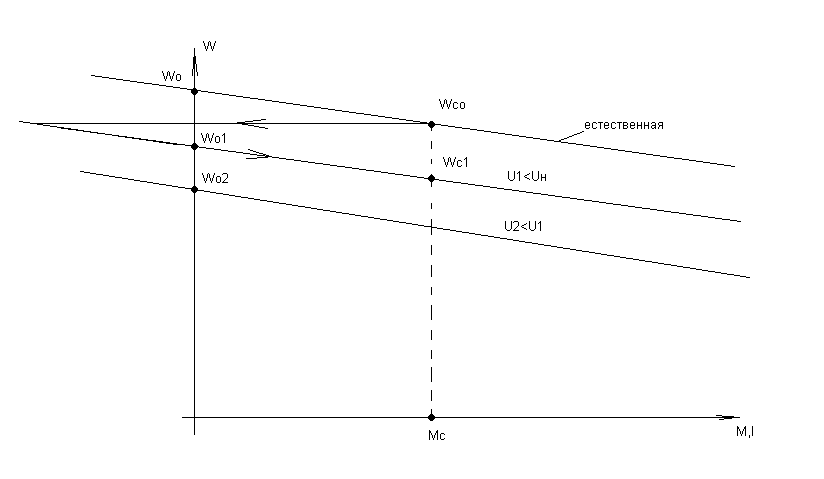
Оценим данный способ регулирования:
-
Диапазон регулирования (20…30):1 -
Регулирование скорости плавное -
Отличается экономичностью, т.к. энергия торможения возвращается в сеть -
Регулирование, как правило, вниз от основной скорости и лишь некоторые двигатели позволяют увеличить UЯ выше UЯН.
14.Основные показатели регулирования скорости электродвигателей. Способы регулирования скорости электродвигателей постоянного тока последовательного возбуждения.
Для оценки различных способов регулирования скорости существуют следующие параметры:
-
Диапазон регулирования: это соотношение к , при которых работа привода при существующих нагрузках будет устойчивой; -
Плавность регулирования – характеризуется числом устойчивых скоростей, получаемых в данном диапазоне регулирования; -
Экономичность регулирования. Оцениваются капитальные затраты, потери электроэнергии; -
Направление возможного регулирования. Вверх или вниз от скорости, определяемой естественной характеристикой.
Регулировать скорость двигателей постоянного тока последовательного возбуждения возможно изменением подводимого напряжения и изменением сопротивления якорной цепи.
-
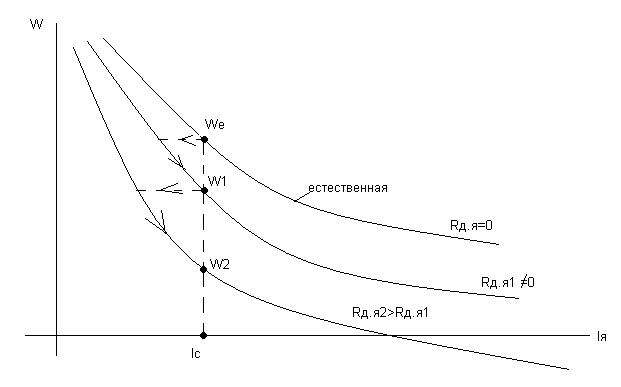
Р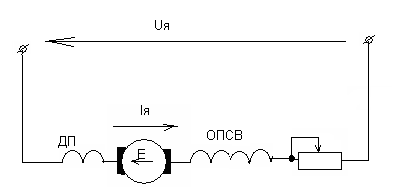 егулирование скорости изменением сопротивления якорной цепи.
егулирование скорости изменением сопротивления якорной цепи.
Введение RД.Я в цепь уменьшает жесткость характеристики и ограничивает IЯ.
Все вышесказанное про данный способ регулирования применительно к двигателям постоянного тока независимого возбуждения, в полной мере относится и к двигателям постоянного тока последовательного возбуждения.
-
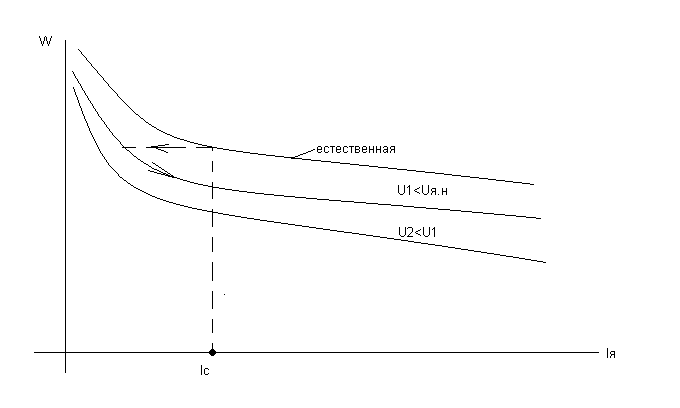
Регулирование скорости изменением подводимого напряжения.
Все вышесказанное про данный способ регулирования применительно к двигателям постоянного тока независимого возбуждения, в полной мере относится и к двигателям постоянного тока последовательного возбуждения.
15.Расчет тормозных сопротивлений двигателя постоянного тока независимого возбуждения (RДТ, RП).
Расчет производится для режимов динамического торможения и противовключения.
-
Режим противовключения.
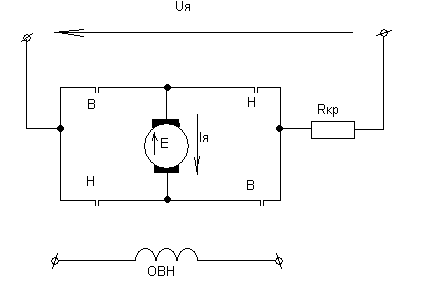
При переключении «В» на «Н» изменится направление IЯ , и следовательно направление момента

Для ограничения тока якоря вводится RКР.
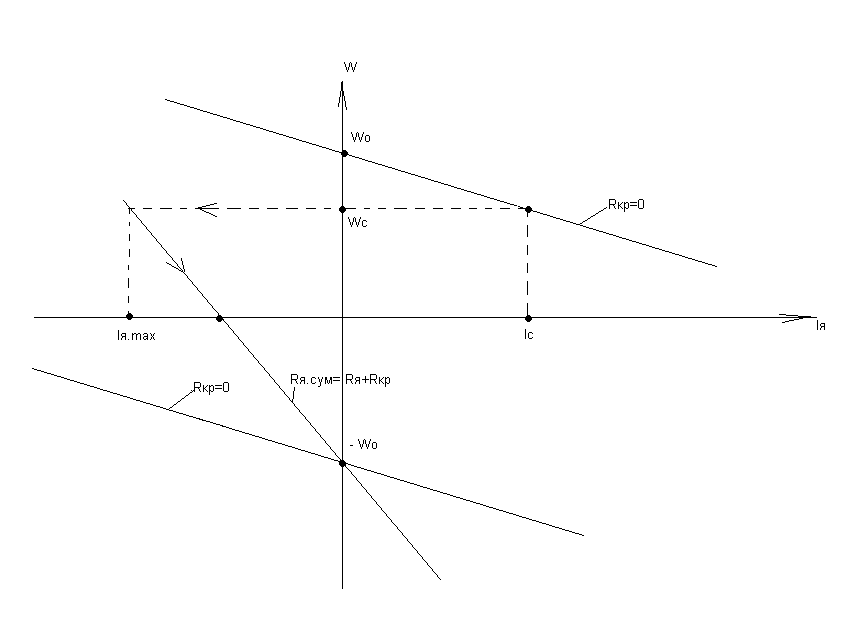
При этом бросок IЯ ограничен значением IЯ.max. RКР определяется из:
Ток якоря ограничивается на уровне 2,5 от номинального.
-
Динамическое торможение.
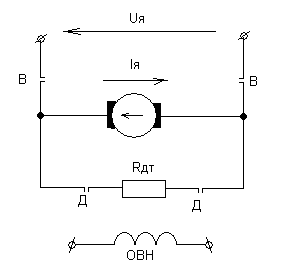
В режиме динамического торможения электродвигатель отключается от сети и его якорные зажимы замыкаются на RД.Т. В этом режиме кинетическая энергия механизма и двигателя расходуется на его нагрев. При отключении двигателя от сети и включении «Д» двигатель по инерции продолжает вращаться в ту же сторону, но IЯ меняет свое направление, т.к. источником становится двигатель
 .
.
Очевидно, что при