Файл: Г.М. Гринфельд ТЕОРИЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ уч. пособие.doc
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 29.07.2024
Просмотров: 633
Скачиваний: 3
СОДЕРЖАНИЕ
1. ОсновНые понятия и определения теории автоматического управления
1.1. Краткие сведения по истории развития систем автоматического управления
1.2. Обобщенная структурная схема сау
2. Математическое описание линейных сау
2.1. Составление и линеаризация дифференциальных уравнений сау
Основные свойства (теоремы) преобразования Лапласа
Изображения по Лапласу типовых сигналов
2.3. Временные и частотные характеристики звеньев и систем
2.4. Элементарные звенья систем автоматического управления
Пропорциональное (усилительное, безинерционное, масштабирующее) звено
Идеальное дифференцирующее звено
Апериодическое звено первого порядка
Реальное дифференцирующее звено
Инерционное звено второго порядка
Интегро-дифференцирующее звено
Пропорционально-интегральный регулятор (пи-регулятор)
2.5. Неминимально-фазовые звенья
2.6. Эквивалентные преобразования структурных схем линейных сау
2.7. Передаточные функции многоконтурных систем
3. Анализ устойчивости линейныхсау
3.1.Понятие устойчивости линейных систем
3.2.Алгебраический критерий устойчивости Гурвица
3.3.Частотные критерии устойчивости Михайлова и Найквиста
3.5.Оценка устойчивости по логарифмическим амплитудно- и фазо-частотным характеристикам
3.6.Устойчивость систем с запаздыванием
4. Качество динамических характеристик сау
4.1. Показатели качества процесса регулирования
4.2. Частотные критерии качества
4.3. Корневые критерии качества
4.4. Интегральные критерии качества
5.1. Стационарные режимы сау. Передаточные функции статических и астатических систем
5.2. Коэффициенты ошибки системы
5.3. Системы комбинированного управления
6. Анализ сау в пространстве состояния
6.1. Основные положения метода переменных состояния
6.2. Способы построения схем переменных состояния
Метод прямого программирования
Метод параллельного программирования
Метод последовательного программирования
6.3. Решение уравнений состояния линейных стационарных сау. Вычисление фундаментальной матрицы
Последовательные корректирующие звенья
Параллельные корректирующие звенья
7.2. Частотный метод синтеза корректирующих устройств
Построение лах в низкочастотном диапазоне
Построение лах в среднечастотном диапазоне
Зависимость колебательности от значений hи h1
Построение лах в высокочастотном диапазоне
7.3. Последовательные корректирующие устройства
7.4. Параллельные корректирующие устройства
7.5. Техническая реализация корректирующих звеньев
Пассивные четырехполюсники постоянного тока
Пассивные корректирующие четырехполюсники
Активные корректирующие звенья
Активные четырехполюсники постоянного тока
8. Нелинейные системы автоматического управления
8.1. Особенности нелинейных систем и методы их анализа
8.2. Исследование нелинейных систем на фазовой плоскости
8.3. Метод гармонической линеаризации нелинейных звеньев
Коэффициенты гармонической линеаризации типовых нелинейностей
8.5. Методы определения параметров автоколебаний
Задание для расчета линейной caу
Варианты задания для расчета линейной сау
Варианты передаточных функций линейной сау
Задание для расчета нелинейной сау
Варианты задания для расчета нелинейной сау
Варианты структурных схем нелинейных систем Варианты статических характеристик нелинейного элемента
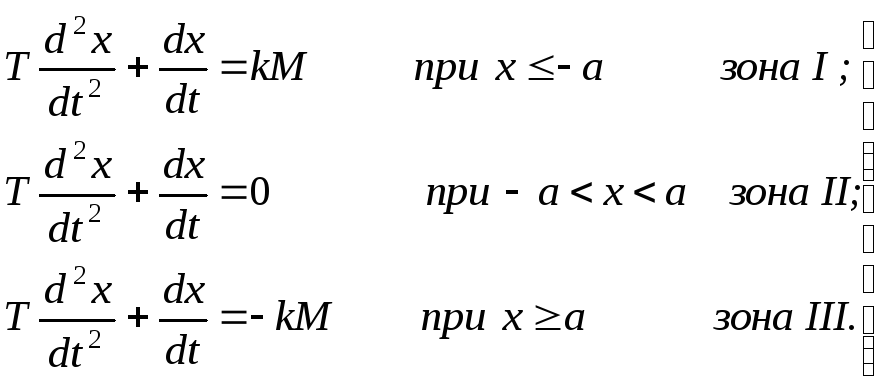 (8.10)
(8.10)
Наиболее
просто выводится уравнение фазовой
траектории для второй зоны (при
![]() ).
Так как
).
Так как![]() и
и![]() ,
то дифференциальное уравнение для
этой зоны можно записать следующим
образом:
,
то дифференциальное уравнение для
этой зоны можно записать следующим
образом:
![]() или
или
![]() .
.
Разделив
последнее выражение на равенство
![]() ,
получим:
,
получим:
![]() или
или
![]() .
.
Интегрируя последнее уравнение, находим:
![]() ,
(8.11)
,
(8.11)
где
![]() – постоянная интегрирования.
– постоянная интегрирования.
При
различных значениях
![]() на участке –а
< х < а
фазовый портрет системы представляет
собой семейство параллельных прямых,
угол наклона которых к оси абсцисс
определяется величиной постоянной
времени
на участке –а
< х < а
фазовый портрет системы представляет
собой семейство параллельных прямых,
угол наклона которых к оси абсцисс
определяется величиной постоянной
времени
![]() .
.
В
первой зоне (при
![]() )
дифференциальное уравнение, описывающее
поведение системы, имеет вид:
)
дифференциальное уравнение, описывающее
поведение системы, имеет вид:
![]() .
.
С
учетом
![]() порядок этого дифференциального
уравнения может быть понижен:
порядок этого дифференциального
уравнения может быть понижен:
![]() или
или
![]() .
.
Разделив
последнее уравнение на
![]() ,
получим:
,
получим:
![]() или
или
![]() .
.
Проинтегрировав это уравнение, получим:
![]() .
(8.12)
.
(8.12)
П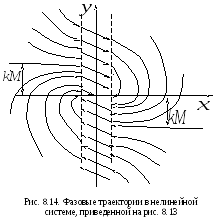 остоянная
интегрирования
остоянная
интегрирования![]() может быть найдена из начальных условий:
может быть найдена из начальных условий:
![]() ,
,
где
(![]() )
– координаты точки, с которой начинается
построение фазовой траектории:
)
– координаты точки, с которой начинается
построение фазовой траектории:
![]() .
.
Подставляя
в выражение (8.12) различные сочетания
значений начальных условий
![]() ,
получим семейство фазовых траекторий
для диапазона значений регулируемой
величины
,
получим семейство фазовых траекторий
для диапазона значений регулируемой
величины
![]() .
.
Семейство
фазовых траекторий для диапазона третьей
зоны (![]() )
получим из
уравнения (8.12), заменив в нем величину
M
на –M
:
)
получим из
уравнения (8.12), заменив в нем величину
M
на –M
:
![]() .
(8.13)
.
(8.13)
Для рассматриваемой системы все фазовые траектории, описываемые выражениями (8.12) – (8.13), имеют вид логарифмических спиралей, сходящихся к началу координат.
П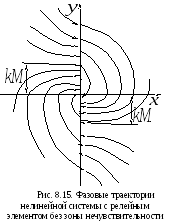 олная
фазовая картина процесса автоматического
регулирования нелинейной системы,
динамические свойства которой определяются
дифференциальными уравнениями (8.10),
имеет вид, представленный на рис. 8.14.
Для других систем вид фазовых траекторий
может быть иным. Например, на рис. 8.15
изображена фазовая картина для
нелинейной системы с той же передаточной
функцией линейной части, что и в предыдущем
примере, но для случая, когда включенный
в систему релейный элемент не имеет
зоны нечувствительности, т.е.
олная
фазовая картина процесса автоматического
регулирования нелинейной системы,
динамические свойства которой определяются
дифференциальными уравнениями (8.10),
имеет вид, представленный на рис. 8.14.
Для других систем вид фазовых траекторий
может быть иным. Например, на рис. 8.15
изображена фазовая картина для
нелинейной системы с той же передаточной
функцией линейной части, что и в предыдущем
примере, но для случая, когда включенный
в систему релейный элемент не имеет
зоны нечувствительности, т.е.
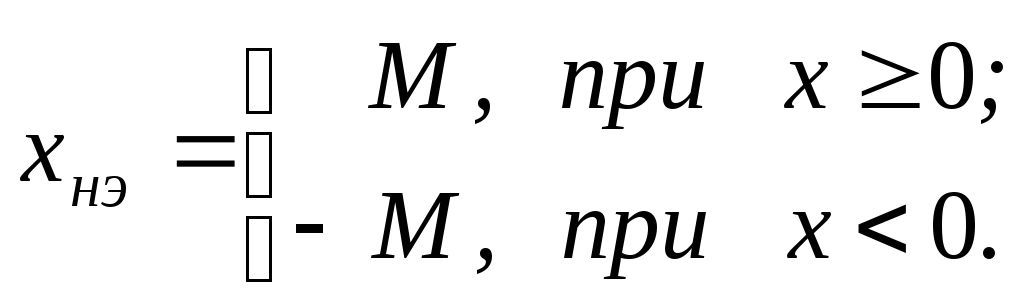 (8.14)
(8.14)
Далеко не всегда при исследовании системы на фазовой плоскости удается получить аналитическое выражение для фазовых траекторий. В то же время для любой системы, линейная часть которой описывается дифференциальным уравнением второго порядка, можно записать следующее уравнение:
![]()
которое может быть сведено к системе дифференциальных уравнений первого порядка:
 (8.15)
(8.15)
Разделив первое уравнение системы (8.15) на второе, получим уравнение фазовой траектории в виде нелинейного дифференциального уравнения первого порядка:
![]() .
(8.16)
.
(8.16)
Построение фазовых траекторий в общем случае не требует решения этого уравнения и может быть выполнено методом изоклин. С этой целью на фазовой плоскости строят семейство изоклин-линий, соответствующих алгебраическому уравнению
![]() ,
(8.17)
,
(8.17)
где
![]() – постоянная величина, для которой
задается ряд произвольных значений от
–
– постоянная величина, для которой
задается ряд произвольных значений от
–![]() до +
до +![]() .
.
Каждому значению Ссоответствует своя изоклина. Как следует из выражения (8.17) для каждой изоклины выполняется равенство:
![]() ,
,
т.е. изоклина представляет собой геометрическое место точек, в которых наклон фазовой траектории постоянен.
Н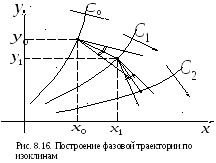 а
рис 8.16 иллюстрируется методика построения
фазовой траектории по нанесенному на
плоскость семейству изоклин. На каждой
изоклине стрелкой указан наклон
(направление касательной), соответствующий
значению
а
рис 8.16 иллюстрируется методика построения
фазовой траектории по нанесенному на
плоскость семейству изоклин. На каждой
изоклине стрелкой указан наклон
(направление касательной), соответствующий
значению![]() .
Из произвольно выбранной начальной
точки с координатами (
.
Из произвольно выбранной начальной
точки с координатами (![]() ),
находящейся на изоклине
),
находящейся на изоклине![]() ,
проводятся два луча с наклонами,
соответствующими значениям
,
проводятся два луча с наклонами,
соответствующими значениям![]() и
и![]() .
Затем до пересечения со следующей
изоклиной
.
Затем до пересечения со следующей
изоклиной![]() проводится биссектриса угла, образованного
указанными лучами. Точка пересечения
с координатами (
проводится биссектриса угла, образованного
указанными лучами. Точка пересечения
с координатами (![]() )
– очередная точка фазовой траектории,
из которой осуществляются аналогичные
построения.
)
– очередная точка фазовой траектории,
из которой осуществляются аналогичные
построения.
По фазовой картине САУ можно судить об устойчивости системы и характере переходных процессов ней.
8.3. Метод гармонической линеаризации нелинейных звеньев
При подаче на вход линейной системы гармонического сигнала
![]() (8.18)
(8.18)
на
выходе системы также устанавливается
гармонический сигнал, но с другой
амплитудой и смещенный по фазе по
отношению к входному. Если же синусоидальный
сигнал подать на вход нелинейного
элемента, то на его выходе формируются
периодические колебания, но по форме
существенно отличающиеся от синусоидальных.
В качестве примера на рис. 8.17 показан
характер изменения выходной переменной
![]() нелинейного элемента с релейной
характеристикой (8.14) при поступлении
на его вход синусоидальных колебаний
(8.18).
нелинейного элемента с релейной
характеристикой (8.14) при поступлении
на его вход синусоидальных колебаний
(8.18).
Разлагая
периодический сигнал на выходе нелинейного
элемента в ряд Фурье, представляем
![]() в виде суммы постоянной составляющей
и бесконечного множества гармонических
составляющих:
в виде суммы постоянной составляющей
и бесконечного множества гармонических
составляющих:
![]() ,
(8.19)
,
(8.19)
г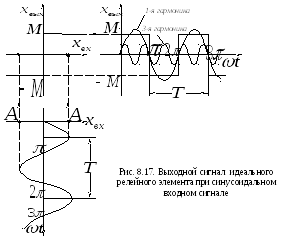 де
де
![]() – постоянные
коэффициенты ряда Фурье;
– постоянные
коэффициенты ряда Фурье;
![]() – частота колебаний первой гармоники
(основная частота), равная частоте
входных синусоидальных колебаний;Т – период
колебания первой гармоники, равный
периоду входных синусоидальных колебаний.
– частота колебаний первой гармоники
(основная частота), равная частоте
входных синусоидальных колебаний;Т – период
колебания первой гармоники, равный
периоду входных синусоидальных колебаний.
Выходной
сигнал нелинейного элемента поступает
на вход линейной части САУ (см. рис. 8.1),
которая, как правило, обладает существенной
инерционностью. При этом высокочастотные
составляющие сигнала (8.19) практически
не проходят на выход системы, т.е. линейная
часть является фильтром по отношению
к высокочастотным гармоническим
составляющим. В связи с этим, а также
учитывая, что амплитуды гармонических
составляющих в
![]() уменьшаются с ростом частоты гармоники,
для приближенной оценки выходной
величины нелинейного элемента, в большом
числе случаев достаточно учитывать
только первую гармоническую
составляющую в
уменьшаются с ростом частоты гармоники,
для приближенной оценки выходной
величины нелинейного элемента, в большом
числе случаев достаточно учитывать
только первую гармоническую
составляющую в![]() .
.