Файл: Учебнометодический комплекс для заочного обучения с применением дистанционных технологий для студентов специальности 190702 Организация и безопасность дорожного движения.doc
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 03.12.2023
Просмотров: 838
Скачиваний: 1
СОДЕРЖАНИЕ
1.Основы построения локальной сети
1.1.Классификация локальной сети
1.2.Локальные компьютерные сети. Основные определения, классификация топологий
1.3.Основные компоненты компьютерных сетей. Их преимущества и недостатки
1.4.Физическая среда передачи ЭВС, виды применяемых кабелей, их маркировка
1.5.Сетевая карта. Общие принципы, функционирование установка и настройка
2.Безпроводные компьютерные сети
2.2.Сигналы для передачи информации
2.4.Кодирование и защита от ошибок
2.5. Пропускная способность канала
2.6.Методы доступа к среде в беспроводных сетях
2.7.Виды сигналов связи и способы их обработки
3.Основы безопасности компьютерных сетей
3.1 Система защиты от утечек конфиденциальной информации
3.2.Специфика проектов внутренней информационной безопасности
3.4.Практические мероприятия по защите информации
3.7.Шифрование данных в интернет-компьютерной сети
4.1.Территориально распределенные пользователи систематического видеонаблюдения
4.2.Функции видеонаблюдения. Основные элементы и схемы построения
4.3.Технология распознавания автомобильных номеров
5.Автоматизированная система управления движением
5.1. Назначения и функции АСУД
5.3.Современные АСУД. Расширенные возможности
6.1. Классификация дорожных контроллеров
7.1. Назначения и классификация
7.2. Принципы действия основные элементы
7.3. Сравнение различных систем детектора транспорта
8.Спутниковые и радионавигационные системы GPS и Глонасс
8.1.Назначения и принципы работы
8.2. Источники ошибок и основные сегменты
8.3. Современные навигационные системы на автомобильном транспорте
8.4. Современная спутниковая система навигации
8.5. История создания спутниковых навигационных систем
8.6.Среднеорбитные спутниковые навигационные системы СНС GPS
8.8.Точность определения координат объектов
8.10. Проблемы и перспективы автомобильной спутниковой навигации
9.1. Структура интеллектуального АТС
10.1. Общие сведения и характеристика
12.Цифровая радиосвязь стандарта АРСО-25
12.1.Основные определения и элементы
12.6. Шифрование и аутентификация
12.7.Вызовы и управления сетей
Примеры Раций стандарта АРСО 25 отечественного и иностранного производства
На основании этого рассмотрим, как должна быть организована структура современной АСУД.
Современную АСУД можно представить как многослойную систему. В предлагается пять функциональных слоев АСУД. При рассмотрении сверху вниз слои названы сеть, связь, координация, регулирование и физический, причем три последних слоя включает в себя бортовая система управления АТС. К настоящему времени успешно внедрены и проверены модели и соответствующие системы управления для каждого из указанных выше слоев АСУД, за исключением сетевого уровня, который находится в стадии разработки.
Физический слой включает все бортовые системы АТС: двигатель, тормозную систему, различные датчики и т.д. Главная функция этого слоя поддерживать поступательное движение АТС на заданном маршруте.
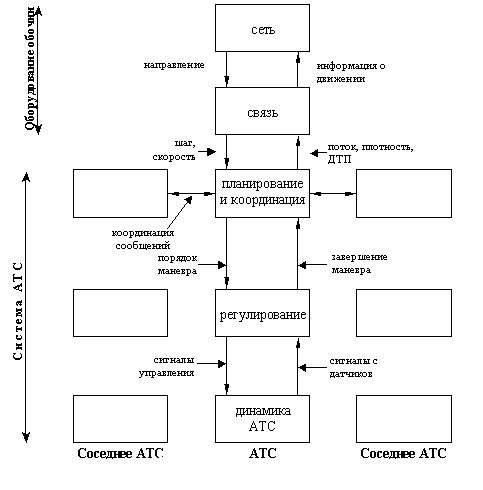
Рисунок 9.1 Схема АТС
Слой регулирования автомобиля отвечает за управление направлением движения АТС и выполнением маневров, которые управляются слоем координации. На этом логическом уровне АСУД, АТС рассматривается как материальная точка. Здесь под управлением направлением движения понимают поддержание желательной скорости и сохранение безопасной дистанции с соседними АТС, а также желательный курсовой угол движения. Этот слой также отвечает за выполнение маневров входа или выхода из потока, контролируемого АСУД.
Слой координации отвечает за выбор действия, которое необходимо выполнить транспортному средству в следующий момент. Слои координации соседних АТС поддерживают связь между собой, а так же проверяют команды слоя регулирования, чтобы выполнить их или начать действовать по плану аварийного прекращения работы. Этот слой также связывается со слоем связи системы управления обочины, из которой периодически получает модифицируемый план действий. Слой координации хранит и обновляет всю информацию о состоянии соседних АТС в потоке. Эта информация включает тип автомобилей, их текущее положение, текущие действия и план дальнейших действий. План периодически модифицируется регулятором слоя связи. Используя информацию и
координируя действия с соседними АТС, регулятор слоя координации выбирает одно действие из конечного множества возможных.
Для каждого достаточно протяженного участка дороги имеется один регулятор слоя связи. Задача его состоит в управлении потоком движения на данном участке дороги, достижении максимальной вместимости потока и минимального времени передвижения в назначенный пункт. На этом логическом уровне, АСУД больше не контролирует действия каждого транспортного средства в отдельности. Вместо этого слой связи измеряет и описывает плотность потока как функцию от пространства и времени. В самом простом случае, если все АТС в потоке выполняют действие а, то пространственно-временное положение для этого действия
(a) = s(а)t, (9.1)
где s в метрах, а t в секундах. Тогда максимальная плотность потока
k(a) = 1/s(a). (9.2)
В реальных условиях s, t и выбор действия а ‑ все переменные.
Задача регулятора сетевого уровня управление движением по маршруту внутри сети дорог, входящих в АСУД, с целью оптимизации плотности потока и минимизации времени движения. Этот слой архитектуры АСУД разработан менее всего.
Каждый из указанных слоев АСУД в свою очередь имеет сложную структуру. Все они работают в своем пространстве и времени. В связи с чрезвычайной сложностью связей как внутри, так и между слоями АСУД, их полное математическое описание в обычном функциональном виде невозможно.
9.2. Перспективы развития АТС
О самостоятельных автомобилях, которые едут сами (Driverless Cars или Autonomous vehicles), человек в силу своей лени мечтает достаточно давно. В особенности те автолюбители, которых огорчает невозможность выпить за рулём пивка или поспать.
Таким образом, езда на машинах без рук вписана не в одну концепцию транспорта будущего.
И вроде как пресса писала не раз, даже по телевизору такие машины показывали: едут друг за дружкой по шоссе, а пассажиры сидят себе бездельничают. Боятся слегка, да. Передача прошла, всё стихло.
Тем не менее, есть несколько способов сделать автомобили автономными. Над каждым работы идут годами, а о прорывах ни слуху, ни духу. Эти разработки, за неимением горячих новинок, мы и рассмотрим.
К примеру, один из самых напрашивающихся вариантов — вкалывают роботы. Вот, вы знали, что робот может сам управлять автомобилем? Самой обычной не переделанной машиной?
Никакой не автопилот — автономный электронный водитель. Это правда. Пределы совершенства механический рулевой естественно не покинул, но может ведь.
Так-так, должно быть, надо тут для начала помянуть научную фантастику — ну, давайте: робот-таксист, робот-гонщик или даже так — робот-угонщик. Дальше реальность.
Пожалуй, наиболее известный робот-водитель — это Клаус (Klaus), созданный немецкими машиностроителями из Volkswagen (VW), впервые показанный общественности в 2000 году.
Публика увидела вот что: напрочь лишённый человеческого облика Клаус — три руки, три ноги, без головы — уверенно сделал на микроавтобусе круг по испытательному полигону.
Робот уже тогда мог судить о расстояниях и избегать препятствий, плавно проходить повороты, только вот тормозил резковато.
Количество ног объясняется просто — по одной на каждую педаль. Что же до рук, то с ними та же история. В отличие от человека, двух Клаусу мало: одной включает/выключает зажигание, другой рулит, третьей переключает передачи.
Впрочем, можно сказать, что рук четыре — захват руля сойдёт за две конечности. Да, а одна рука "растёт" прямо из того места, где голова должна быть, по идее.
Выяснилось, что оснащён робот тремя лазерными сканерами, стереокамерой, видео и спутниковыми навигационными системами, а также радаром, присоединённым к компьютеру. Кроме того, Клауса наградили технологиями электронного торможения и предотвращения столкновений.

Рисунок 9.2 1997-й, Калифорния. Конвой автомобилей движется на автопилоте

Рисунок 9.3 Робот Клаус за рулём микроавтобуса VW Caravelle
Представители VW сразу сказали: то, что вы увидите этого робота за рулём на шоссе — крайне маловероятно. В лучшем случае, на его основе будут разработаны системы, которые помогут водителям избегать опасных ситуаций.
После демонстрации в 2000-м Клаус не умер, следующий показ был проведён в августе 2002-го, но принципиальных изменений в конструкции робота не произошло.
Как обстоят дела сегодня, сказать трудно — своего нечеловеческого водителя VW в Сети никак не представил, а новостей в СМИ о нём с тех пор не было. Само собой, подобные эксперименты проводятся и в Японии, но не похоже, чтобы там переплюнули немцев.

Рисунок 9.4 Гуманоид немца Клауса

Рисунок 9.5 Машиной управляет робот, в салон набилось немало пассажиров
Американцы естественно также давно мечтают во время езды не обращать внимания на дорогу. Так, в университете Аризоны (University of Arizona — UA) не только сделали свой самоуправляемый автомобиль VISTA ("Перспектива"), но и устроили обзор машин, над которыми трудятся их коллеги.
С Аризоны тогда и начнём. VISTA — это интеллектуальное транспортное средство, сотворённое из сильно модернизированного Chevrolet Celebrity 1989 года выпуска.
Работает так: радар на переднем бампере, камера на ветровом стекле, а также несколько датчиков собирают информацию в реальном времени и передают её на центральный компьютер, в который уже зашита карта местности и маршрут поездки.
В общем, идёт непрерывный обмен информацией, позволяющий оперативно корректировать движение машины, а бортовой компьютер постоянно посылает новые команды маленьким двигателям, которые и управляют автомобилем.
Рисунок 9.6 В Аризоне автономную машину сделали из старого "Шевроле"
"Перспектива" может появиться на дороге в пределах следующих 5-10 лет, а первая цель — двухчасовый автоматический переезд от Тусона до Феникса по шоссе Interstate 10.
Затем планируется открыть между этими двумя городами интеллектуальную трассу ("Intelligent Express Lanes"). Аризонское управление транспорта (Arizona Department of Transportation) поддерживает этот проект и уже выделило $100 тысяч. Проблемы, конечно, имеются, но в UA надеются с ними справиться.
Практически тем же занимаются в навигационной лаборатории университета Карнеги-Меллона (Carnegie Mellon University Navigation Laboratory — CMU Navlab), но размах больше: здесь хотят автоматизировать даже внедорожники. Впрочем, тем же способом, что и в UA.
А в университете Калифорнии в Беркли (University of California at Berkeley) вдобавок к компьютеризации самого автомобиля думают автоматизировать сами дороги, вложив в них магнитные маркеры.
И радарные системы и маркеры, и вообще всё, что только можно навесить на машину, чтоб сделать её автономной, используют в центре университета Огайо CITR.

Рисунок 9.7 Самоуправляемый джип Wrangler Sport из университета Карнеги-Меллона
Радарами и лазерами, установленными на переднем бампере, автомобиль светит на дорогу как фарами, таким образом, распознавая маркеры по краям дороги и другие автомобили на трассе.
Успешные испытания на изолированном участке автострады разработчики из Огайо провели ещё в 1997-м: два белых автономных автомобиля с пассажирами благополучно проехали по спецшоссе вместе с управляемым человеком зелёным автомобилем.
Тем не менее, по прошествии 5-ти с лишним лет ничего нового о проекте не слышно. Не странно ли? Что же до свеженького, то здесь нельзя не помянуть конкурс, устроенный исследовательским агентством Пентагона — DARPA Grand Challenge for Autonomous Ground Vehicles.
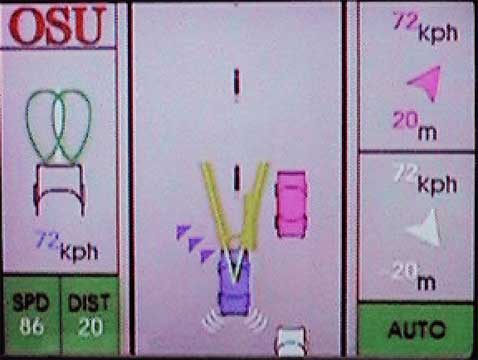
Рисунок 9.8 Интерфейс для пассажира. Даже если управляет не он, надо же знать, что происходит
Смысл вот в чём: американская команда, которая построит автономное транспортное средство, способное в марте 2004 года преодолеть расстояние от Лос-Анджелеса до Лас-Вегаса