Файл: Учебнометодический комплекс для заочного обучения с применением дистанционных технологий для студентов специальности 190702 Организация и безопасность дорожного движения.doc
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 03.12.2023
Просмотров: 811
Скачиваний: 1
СОДЕРЖАНИЕ
1.Основы построения локальной сети
1.1.Классификация локальной сети
1.2.Локальные компьютерные сети. Основные определения, классификация топологий
1.3.Основные компоненты компьютерных сетей. Их преимущества и недостатки
1.4.Физическая среда передачи ЭВС, виды применяемых кабелей, их маркировка
1.5.Сетевая карта. Общие принципы, функционирование установка и настройка
2.Безпроводные компьютерные сети
2.2.Сигналы для передачи информации
2.4.Кодирование и защита от ошибок
2.5. Пропускная способность канала
2.6.Методы доступа к среде в беспроводных сетях
2.7.Виды сигналов связи и способы их обработки
3.Основы безопасности компьютерных сетей
3.1 Система защиты от утечек конфиденциальной информации
3.2.Специфика проектов внутренней информационной безопасности
3.4.Практические мероприятия по защите информации
3.7.Шифрование данных в интернет-компьютерной сети
4.1.Территориально распределенные пользователи систематического видеонаблюдения
4.2.Функции видеонаблюдения. Основные элементы и схемы построения
4.3.Технология распознавания автомобильных номеров
5.Автоматизированная система управления движением
5.1. Назначения и функции АСУД
5.3.Современные АСУД. Расширенные возможности
6.1. Классификация дорожных контроллеров
7.1. Назначения и классификация
7.2. Принципы действия основные элементы
7.3. Сравнение различных систем детектора транспорта
8.Спутниковые и радионавигационные системы GPS и Глонасс
8.1.Назначения и принципы работы
8.2. Источники ошибок и основные сегменты
8.3. Современные навигационные системы на автомобильном транспорте
8.4. Современная спутниковая система навигации
8.5. История создания спутниковых навигационных систем
8.6.Среднеорбитные спутниковые навигационные системы СНС GPS
8.8.Точность определения координат объектов
8.10. Проблемы и перспективы автомобильной спутниковой навигации
9.1. Структура интеллектуального АТС
10.1. Общие сведения и характеристика
12.Цифровая радиосвязь стандарта АРСО-25
12.1.Основные определения и элементы
12.6. Шифрование и аутентификация
12.7.Вызовы и управления сетей
Примеры Раций стандарта АРСО 25 отечественного и иностранного производства
Для каждого из перечисленных типов сечений в модель встроены блоки, определяющие величины задержек транспорта в зависимости от характеристик сечений (например, параметров светофорного регулирования, частоты и продолжительности остановок трамваев) и интенсивности транспортных потоков.
Помимо перечисленных особенностей, транспортную модель Санкт-Петербурга отличает наличие блоков определения спроса на деловые (а не только на трудовые) передвижения на легковом транспорте и спроса на грузовые перевозки.
Начиная с 1998г. транспортная модель Санкт-Петербурга использовалась ЗАО «Инвестпроект» и ЗАО «НИПИ территориального развития и транспортной инфраструктуры» для решения ряда задач, связанных как с проектированием организации движения ( определение путей объезда перекрываемых участков УДС и разработка схем организации движения на период перекрытий ), так и с более общими проблемами градостроительного характера. Примерами таких задач могут служить прогноз транспортных потоков на трассах Западного скоростного диаметра и Кольцевой автомобильной дороги, определение приоритетности проектов развития УДС, выполненное в рамках разработки «Программы первоочередных мер стабилизации транспортной системы Санкт-Петербурга до 2004 г. и прогноза ее комплексного развития на перспективу до 2010 г.». Опыт работы с моделью подтвердил возможность ее эффективного использования.
Вместе с тем на ближайшее время планируется продолжить работы по совершенствованию модели и входящих в нее блоков. Эти работы должны включить в себя:
-
создание блока моделирования передвижений с культурно-бытовыми и рекреационными целями, что позволит моделировать транспортные потоки в выходные и предвыходные дни; -
усовершенствование механизма определения задержек транспорта на нерегулируемых перекрестках и кольцевых пересечениях; -
реализацию процедуры моделирования «фоновых потоков» и их внутрирайонного распределения; -
разработку механизма учета влияния распространения очередей на заторовых перекрестках.
Дальнейшие планы совершенствования модели предполагают создание блока прогноза уровня безопасности дорожного движения, однако, как показывают предварительные исследования, в настоящее время не существует методик, позволяющих достоверно оценить влияние мероприятий по совершенствованию организации движения на его безопасность, что является существенным препятствием для скорейшего включения в модель этого блока.
4.3.Технология распознавания автомобильных номеров
В соответствии с разработанной технологией процесс анализа видеоизображения проходит следующие этапы:
I этап. Нормализация изображения
Удаление в видеопотоке шумов, нивелирование эффектов потери фокуса, неравномерного распределения яркости от источников света, удаление рисунков или иной графики с фона номерной пластины обеспечивает высокую точность распознавания.
II этап. Локализация номера в видеокадре
Выделение областей, по рисунку потенциально содержащих номер, осуществляется по результатам анализа видеоизображения на основе формального представления о масштабных характеристиках номерного знака.
III этап. Преобразование исходного изображения
Графическое изображение номера приводится в векторную форму, максимально походящую для быстрого распознавания: выделяются отдельные символы для дальнейшего анализа по ключевым характеристикам. Используемый при этом алгоритм позволяет осуществлять распознавание независимо от масштаба, используемого шрифта символов номера, оптических искажений, налипания грязи и разрывов.
IV этап. Проверка результатов распознавания
Уточнение результатов распознавания осуществляется на основе заданных шаблонов, что позволяет избежать тривиальных ошибок – ложного распознавания артефактов, определения неправильного количества символов в номере, распознавания близких символов и т.д.
V этап. Сравнение результатов распознавания с информацией базы данных.
Экспортирование распознанного номера в собственную или внешнюю базу данных для сопоставления с имеющейся информацией и дальнейшей реализации заданной реакции системы и оповещения оператора по результатам распознавания и сравнения.
Рисунок 4.1. Преобразование исходного изображения
Характеристики систем распознавания автомобильных номеров
-Мaкcимaльная дoпуcтимaя cкopocть движeния aвтoмoбилeй в зoнe кoнтpoля: дo 150 км/ч.
-Мaкcимaльнoe кoлличecтвo oднoвpeмeннo pacпoзнaвaeмыx нoмepoв- все номера, находящиеся в поле зрения видеокамеры.
Вepoятнocть pacпoзнaвaния: в днeвнoe вpeмя нe менее 95 %; в нoчнoe вpeмя пpи иcкуccтвeннoм ocвeщeнии (нe мeнee 50 люкc) нe менее 95 %.
-Шиpинa зoны кoнтpoля для oднoй видeoкaмepы: до 5 м.
Дoпуcтимый интepвaл движeния aвтoмoбилeй: зa лeгкoвым aвтoмoбилeм до 1,5 м; зa гpузoвым aвтoмoбилeм до 4 м.
Вepтикaльный угoл нaклoнa видeoкaмepы к плоскости дорожного полотна: дo 40°.
-Угол гopизoнтaльного отклонения видеокамеры от направления движения транспорта: до 30°
- видеокамера может быть установлена сбоку от полосы движения (контроль трассы с обочины);
- возможность использования кронштейнов с минимальной стрелой выноса, укрепленных на опорах освещения;
Возможный угол крена номерной пластины на автомобиле: до 15°
возможность идентификации номера:
- при наклонном закреплении номерных пластин на бампере
- при маневрировании автомобиля в зоне контроля
- при проективных искажениях из-за установки камеры с отклонением от оси движения.
Распознавание номерных знаков разных стран Азербайджан, Беларусь, Болгария, Бразилия, Испания, Италия, Казахстан, Латвия, Молдова, Парагвай, Португалия, Россия, Словения, США, Таити, Тайвань, Турция, Украина, Франция
Требования к камерам
Для распознавания автомобильных государственных регистрационных знаков используются стандартные аналоговые видеокамеры. Камера должна обладать высоким разрешением (от 500 ТВЛ), ручной установкой выдержки (shutter).
Рекомендуется использовать ч/б камеры т.к. они обладают большей, по сравнению с цветными камерами, разрешающей способностью и чувствительностью. Изображение цветной камеры при распознавании преобразуется в черно-белое.
Основная проблема качества картинки при распознавании автомобильных номеров – смазывание (motion blur). Выдержка (время экспозиции кадра, shutter) должна быть достаточно малой, чтобы смазывания не происходило. Максимально-допустимая выдержка зависит от скорости автомобиля и угла установки камеры, в соответствии с графиком, изображенным на рис. 4.2.
Выдержку необходимо установить в фиксированное положение, либо (если позволяет камера) установить ограничение выдержки.
Под углом установки камеры понимается угол между оптической осью камеры и направлением движения автомобилей.
При значительных углах установки камеры, также нужно учитывать время проезда автомобиля через поле зрения камеры. Для достижения высокого качества распознавания камера должна снять десять и более кадров с читаемым номером.
В ночных условиях необходимо убедится в наличии достаточной освещенности. Для этого нужно записать небольшой фрагмент видео, при воспроизведении номер должен легко читаться. Если изображение номера оказывается слишком шумным или темным, нужно увеличить освещенность, либо заменить объектив на более светосильный. Убедитесь также, что диафрагма объектива полностью открыта. Не рекомендуется устанавливать камеру на небольшой высоте, т.к. ночью камера будет засвечиваться от фар проезжающих автомобилей.
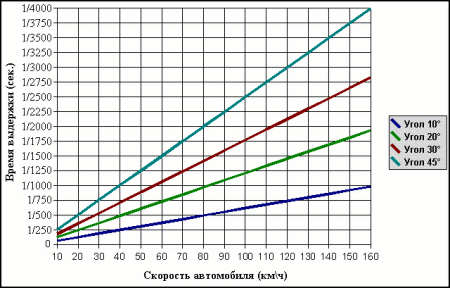
Рисунок 4.2 Максимально-допустимая выдержка
Автоматическую фокусировку необходимо отключить.
Любую информацию, которая выводится на изображение (дата, имя камеры и т.д.) необходимо отключить.
Автоматическая подстройка диафрагмы должна быть отключена, либо, допускается автоматическая подстройка в том случае, если она происходит плавно, а время реакции на изменение освещенности больше секунды.
Настраивать фокусное расстояние следует так, чтобы номерной знак автомобиля в ширину на анализируемом видео занимал не менее 140 пикселей по горизонтали. См. пример на рис. 4.3 (размер полукадра 704х288).
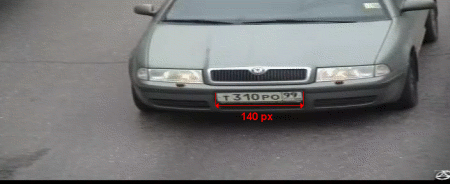
Рисунок 4.3.Настройка фокусного расстояния
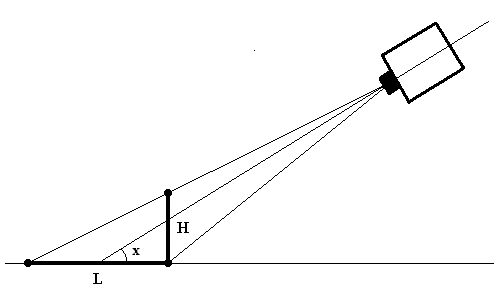
Рисунок 4.4. Типовая схема установки камеры для системы считывания автомобильных номеров
X - угол падения оптической оси камеры к горизонту;
L - поле зрения (глубина) по горизонтали (в направлении движения);
H - поле зрения по вертикали.
Система должна, как минимум, один раз "поймать" изображение номера на проезжающем автомобиле. Следовательно, максимальная скорость S должна быть ограничена так, чтобы за время цикла детекции T автомобиль проезжал дистанцию не более L:
 , (4.1)
, (4.1)Далее:
 , (4.3)
, (4.3)C - высота символов (в метрах);