Файл: Учебнометодический комплекс для заочного обучения с применением дистанционных технологий для студентов специальности 190702 Организация и безопасность дорожного движения.doc
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 03.12.2023
Просмотров: 860
Скачиваний: 1
СОДЕРЖАНИЕ
1.Основы построения локальной сети
1.1.Классификация локальной сети
1.2.Локальные компьютерные сети. Основные определения, классификация топологий
1.3.Основные компоненты компьютерных сетей. Их преимущества и недостатки
1.4.Физическая среда передачи ЭВС, виды применяемых кабелей, их маркировка
1.5.Сетевая карта. Общие принципы, функционирование установка и настройка
2.Безпроводные компьютерные сети
2.2.Сигналы для передачи информации
2.4.Кодирование и защита от ошибок
2.5. Пропускная способность канала
2.6.Методы доступа к среде в беспроводных сетях
2.7.Виды сигналов связи и способы их обработки
3.Основы безопасности компьютерных сетей
3.1 Система защиты от утечек конфиденциальной информации
3.2.Специфика проектов внутренней информационной безопасности
3.4.Практические мероприятия по защите информации
3.7.Шифрование данных в интернет-компьютерной сети
4.1.Территориально распределенные пользователи систематического видеонаблюдения
4.2.Функции видеонаблюдения. Основные элементы и схемы построения
4.3.Технология распознавания автомобильных номеров
5.Автоматизированная система управления движением
5.1. Назначения и функции АСУД
5.3.Современные АСУД. Расширенные возможности
6.1. Классификация дорожных контроллеров
7.1. Назначения и классификация
7.2. Принципы действия основные элементы
7.3. Сравнение различных систем детектора транспорта
8.Спутниковые и радионавигационные системы GPS и Глонасс
8.1.Назначения и принципы работы
8.2. Источники ошибок и основные сегменты
8.3. Современные навигационные системы на автомобильном транспорте
8.4. Современная спутниковая система навигации
8.5. История создания спутниковых навигационных систем
8.6.Среднеорбитные спутниковые навигационные системы СНС GPS
8.8.Точность определения координат объектов
8.10. Проблемы и перспективы автомобильной спутниковой навигации
9.1. Структура интеллектуального АТС
10.1. Общие сведения и характеристика
12.Цифровая радиосвязь стандарта АРСО-25
12.1.Основные определения и элементы
12.6. Шифрование и аутентификация
12.7.Вызовы и управления сетей
Примеры Раций стандарта АРСО 25 отечественного и иностранного производства
Имеется три уровня чувствительности: минимальный, средний и максимальный. При установке максимальной чувствительности дальность обнаружения в стационарном режиме достигает 700 - 800 м. Регулировка дальности позволяет настроить прибор для работы в различных условиях, с учетом расположения дорожных знаков, интенсивности движения и погодных условий.
- Ручной или автоматический режим работы из стационарного положения
Измерение скорости из стационарного положения наиболее распространенный режим работы. С прибором можно работать в автономном режиме без патрульного автомобиля.
- Контроль скорости из движущегося автомобиля
Более подробная информация о приемах работы в процессе движения>
- Установка порога скорости
В исходном состоянии пороговое значение скорости 72 км/час. При необходимости порог можно изменить с дискретностью 1 км/час.
- Индикация СВЧ-излучения, состояния источника питания, выбранных режимов работы
При смене режимов работы, разрядки батарей на табло появляются соответствующие символы.
- Память для хранения данных о двух нарушителях
Две независимые ячейки памяти позволяют одновременно работать с двумя нарушителями. В каждой ячейке хранится информация о скорости и времени, прошедшем с момента фиксации нарушения. Время хранения данных в памяти - 10 минут.
Отличительные особенности и преимущества
- Литий-ионные аккумуляторные батареи
Встроенные в рукоятку аккумуляторные батареи обеспечивают в автономном режиме не менее 16 часов непрерывной работы. Зарядное устройство также вмонтировано в корпус радара, что позволяет произвести подзарядку аккумуляторов от бортовой сети не прерывая работы.
- Энергосберегающие функции
Энергопотребление прибора управляется процессором. При длительном простое прибор переходит в "спящий" режим.
- Высокая точность и быстродействие
Применяемый в радарах ИСКРА-1 импульсный способ измерения обеспечивает высокое быстродействие. Менее, чем за одну секунду радар успевает совершить многократное измерение как собственной скорости, так и скорости цели, исключить возможные ошибки и погрешности
, статистически обработать результаты измерений, и вывести их на табло или компьютер.
- Рабочая частота 24.15 ГГц (К-диапазон)
Данный частотный диапазон обеспечивает лучшую селективность целей за счет относительно узкой диаграммы направленности при небольших размерах антенны, повышает надежность работы при неблагоприятных погодных условиях (дождь, снег и т.д.)
- Модульная конструкция
Радар собирается из нескольких отдельных блоков аналогично современному компьютеру. Такой подход обеспечивает высокую надежность каждого блока и всего прибора в целом. В сервисных центрах всегда имеется запас сменных блоков, что существенно сокращает сроки обслуживания и ремонта.
- Обрезиненный металлический корпус
Защитное резиновое покрытие и металлический корпус обеспечивают высокую механическую прочность радара, влагостойкость и пылезащищенность, защищает прибор при падении.
- Яркое информативное табло
Табло выполнено на ярких двухцветных индикаторах. Данные о скорости и показания таймера поочередно автоматически выводятся на табло. Второстепенная информация выводится по дополнительному запросу, что облегчает считывание данных и исключает ошибки.
- 1 ... 29 30 31 32 33 34 35 36 ... 45
Эффект Доплера
Пражский профессор Христиан Доплер(1803 – 1853) в 1842г. опубликовал статью «Об окрашенном свете двойных звезд и некоторых других небесных светил», где впервые рассмотрел вопрос об изменении частоты излучения света в зависимости от движения его источника или приемника. Предсказанный им эффект относится к колебаниям любой природы, так что его механизм действия можно проиллюстрировать на примере расходящихся кругов по поверхности воды от периодически погружаемого в воду поплавка i. Если поплавок i покоится, то на водной глади образуется ряд вложенных колец различного диаметра, имеющих общий центр (рис. 10.11а); если поплавок i равномерно и прямолинейно перемещается, продолжая совершать колебания, то центры окружностей сместятся вдоль оси x (рис. 10.11б).
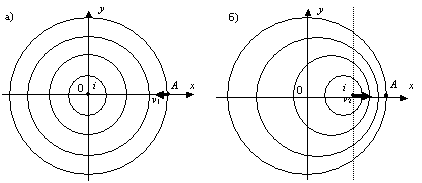
Рисунок 10.11 Эффект Доплера
источник колебаний i покоится, приемник A движется со скоростью v1 по направлению к источнику (а); приемник A покоится, источник i движется со скоростью v2 по направлению к приемнику (б). В обоих случаях будет наблюдаться изменение длины волны λ.
Обозначим параметры собственных колебаний поплавка следующими буквами: f – частота колебаний, T – период, λ – длина волны, а через c – скорость распространения волны по поверхности воды. Тогда для неподвижного источника и покоящегося наблюдателя будут справедливы следующие соотношения: λ = cT, λ = c/f, T = 1/f.
Теперь вообразите, что поплавок i никуда не перемещается, а вы в роли наблюдателя (или приемника A) плывете на лодке со скоростью v1< c вдоль оси x по направлению к источнику колебаний i (рис. 9.1а). Понятно, что длина волны λ для вас уменьшится и станет равной λ1. Так как вы плывете навстречу волне, набегающей на вас, то относительная скорость окажется равной сумме скоростей: c + v1. Очевидно, что длина волны λ1 во столько раз меньше длины волны λ, во сколько раз c меньше c + v1, т.е.
 , (10.1)
, (10.1), (10.2)
Период колебаний T для вас также сократится и будет равным T1, а частота f, напротив, увеличится и станет равной f1:
 , (10.4)
, (10.4)Если лодка останется неподвижной относительно водной поверхности, а источник колебаний i начнет перемещаться со скоростью v2 < c по направлению к приемнику A, как указано на рис. 9.11б, то воспринимаемая длина волны λ2 также уменьшится, но уже в иной пропорции. Так как поплавок движется в ту же самую сторону, что и волновой фронт, их относительная скорость будет равна разности двух скоростей: c – v2. Длина λ2 во столько раз меньше длины λ во сколько раз c – v2 меньше c; аналогично в отношении периода T2 и частоты f2:
Важно подчеркнуть, что сокращение длины волны и периода колебаний при движущемся наблюдателе и покоящимся, источнике происходит за счет сложения скоростей c + v1, а при движущемся источнике и покоящемся наблюдателе это сокращение происходит уже по другому закону – за счет вычитания скоростей: c – v2. Таким образом, благодаря эффекту Доплера принцип относительности движения источника и приемника волн нарушается: по измеренным параметрам волнового процесса всегда можно определить, что относительно чего движется – либо источник движется относительно приемника, либо приемник движется относительно источника, другими словами, движение источника и приемника носит абсолютный характер.
Если в рассмотренных двух случаях направления скоростей
v1 и v2 изменить на противоположные, то в обоих случаях будет наблюдаться увеличение длины волны и периода колебаний, которое будет происходить тоже по различным законам. В табл. 10.2, помимо четырех типов раздельного движения источника и приемника колебаний, указаны еще четыре случая их совместного перемещения. Две последние формулы свидетельствуют: когда источник и приемник колебаний движутся в одном направлении с одинаковой скоростью, приемник будет регистрировать ту же самую длину волны, период и частоту колебаний, что и при покоящихся источнике и приемнике. Следовательно, такие приборы, как интерферометр Майкельсона, в котором источник света и приемник (в качестве приемника могут выступать зеркала и экраны детекторов, где получают интерференционные полосы) перемещаются совместно, не пригодны для регистрации своего движения относительно светоносной среды (если предположить, что таковая имеется); все волновые процессы, включая интерференционную картину, в таких приборах будут происходить так, как будто бы прибор неподвижен.
Таблица 10.2
| Состояния приемника A и источника i | Принимаемая длина волны λ' | Принимаемая частота f ' |
| A и i сближаются: A движется, i покоится | | |
| A и i сближаются: A покоится, i движется | | |
| A и i удаляются: A движется, i покоится | | |
| A и i удаляются: A покоится, i движется | | |
| A и i оба движутся навстречу друг ругу на сближение | |  |
| A и i оба движутся в противоположные стороны на удаление | |  |
| A и i оба движутся в положительном направлении оси x | |  |
| A и i оба движутся в отрицательном направлении оси x | |  |