Файл: Учебнометодический комплекс для заочного обучения с применением дистанционных технологий для студентов специальности 190702 Организация и безопасность дорожного движения.doc
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 03.12.2023
Просмотров: 820
Скачиваний: 1
СОДЕРЖАНИЕ
1.Основы построения локальной сети
1.1.Классификация локальной сети
1.2.Локальные компьютерные сети. Основные определения, классификация топологий
1.3.Основные компоненты компьютерных сетей. Их преимущества и недостатки
1.4.Физическая среда передачи ЭВС, виды применяемых кабелей, их маркировка
1.5.Сетевая карта. Общие принципы, функционирование установка и настройка
2.Безпроводные компьютерные сети
2.2.Сигналы для передачи информации
2.4.Кодирование и защита от ошибок
2.5. Пропускная способность канала
2.6.Методы доступа к среде в беспроводных сетях
2.7.Виды сигналов связи и способы их обработки
3.Основы безопасности компьютерных сетей
3.1 Система защиты от утечек конфиденциальной информации
3.2.Специфика проектов внутренней информационной безопасности
3.4.Практические мероприятия по защите информации
3.7.Шифрование данных в интернет-компьютерной сети
4.1.Территориально распределенные пользователи систематического видеонаблюдения
4.2.Функции видеонаблюдения. Основные элементы и схемы построения
4.3.Технология распознавания автомобильных номеров
5.Автоматизированная система управления движением
5.1. Назначения и функции АСУД
5.3.Современные АСУД. Расширенные возможности
6.1. Классификация дорожных контроллеров
7.1. Назначения и классификация
7.2. Принципы действия основные элементы
7.3. Сравнение различных систем детектора транспорта
8.Спутниковые и радионавигационные системы GPS и Глонасс
8.1.Назначения и принципы работы
8.2. Источники ошибок и основные сегменты
8.3. Современные навигационные системы на автомобильном транспорте
8.4. Современная спутниковая система навигации
8.5. История создания спутниковых навигационных систем
8.6.Среднеорбитные спутниковые навигационные системы СНС GPS
8.8.Точность определения координат объектов
8.10. Проблемы и перспективы автомобильной спутниковой навигации
9.1. Структура интеллектуального АТС
10.1. Общие сведения и характеристика
12.Цифровая радиосвязь стандарта АРСО-25
12.1.Основные определения и элементы
12.6. Шифрование и аутентификация
12.7.Вызовы и управления сетей
Примеры Раций стандарта АРСО 25 отечественного и иностранного производства
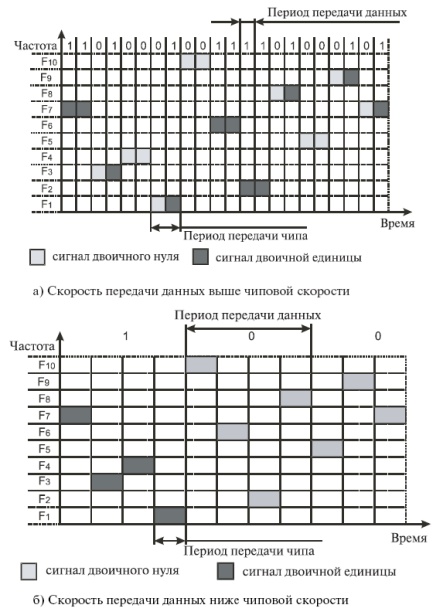
Рисунок 2.8 Соотношение между скоростью передачи данных и частотой смены подканалов
Код, которым заменяется двоичная единица исходной информации, называется расширяющей последовательностью, а каждый бит такой последовательности - чипом.
Соответственно, скорость передачи результирующего кода называют чиповой скоростью. Двоичный нуль кодируется инверсным значением расширяющей последовательности. Приемники должны знать расширяющую последовательность, которую использует передатчик, чтобы понять передаваемую информацию.
Количество битов в расширяющей последовательности определяет коэффициент расширения исходного кода. Как и в случае FHSS, для кодирования битов результирующего кода может использоваться любой вид модуляции, например BFSK.
Чем больше коэффициент расширения, тем шире спектр результирующего сигнала и выше степень подавления помех. Но при этом растет занимаемый каналом диапазон спектра. Обычно коэффициент расширения имеет значение от 10 до 100.
Пример
Очень часто в качестве значения расширяющей последовательности берут последовательность Баркера (Barker), которая состоит из 11 бит: 10110111000. Если передатчик использует эту последовательность, то передача трех битов 110 ведет к передаче следующих битов:
10110111000 10110111000 01001000111.
Последовательность Баркера позволяет приемнику быстро синхронизироваться с передатчиком, то есть надежно выявлять начало последовательности. Приемник определяет такое событие, поочередно сравнивая получаемые биты с образцом последовательности. Действительно, если сравнить последовательность Баркера с такой же последовательностью, но сдвинутой на один бит влево или вправо, мы получим меньше половины совпадений значений битов. Значит, даже при искажении нескольких битов с большой долей вероятности приемник правильно определит начало последовательности, а значит, сможет правильно интерпретировать получаемую информацию.
Метод DSSS в меньшей степени защищен от помех, чем метод быстрого расширения спектра, так как мощная узкополосная помеха влияет на часть спектра, а значит, и на результат распознавания единиц или нулей.
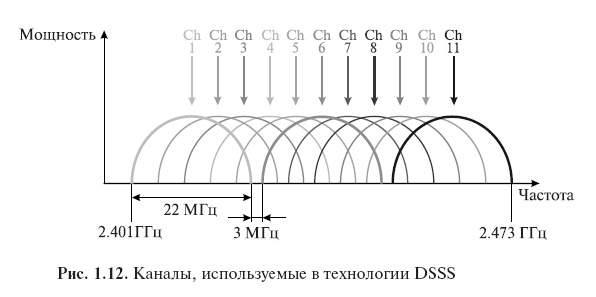
Рисунок 2.9 Каналы, используемые в технологии DSSS
Беспроводные локальные сети DSSS используют каналы шириной 22 МГц, благодаря чему многие WLAN могут работать в одной и той же зоне покрытия. В Северной Америке и большей части Европы, в том числе и в России, каналы шириной 22 МГц позволяют создать в диапазоне 2,4- 2,473 ГГц три неперекрывающихся канала передачи. Эти каналы показаны на 2.9.
2.7.Виды сигналов связи и способы их обработки
Аналоговые, дискретные и цифровые сигналы
Одной из тенденций развития современных систем связи является широкое применение в них дискретно-аналоговой и цифровой обработки сигналов (ДАО и ЦОС).
Аналоговый сигнал Z’(t), первоначально используемый в радиотехнике, может быть представлен в виде непрерывного графика (рис. 2.10а). К аналоговым сигналам относят АМ-, ЧМ-, ФМ-сигналы, сигналы телеметрического датчика и др. Устройства, в которых обрабатываются аналоговые сигналы, называются устройствами аналоговой обработки. К таким устройствам относятся преобразователи частоты, различные усилители, фильтры LC и др.
Оптимальный приём аналоговых сигналов, как правило, предусматривает алгоритм оптимальной линейной фильтрации, которая актуальна особенно при использовании сложных шумоподобных сигналов. Однако именно в этом случае построение согласованного фильтра представляет большую сложность. При использовании согласованных фильтров на основе многоотводных линий задержки (магнитострикционных, кварцевых и др.) получаются большие затухания, габариты и нестабильность задержки. Перспективны фильтры на поверхностных акустических волнах (ПАВ), но малые длительности обрабатываемых в них сигналов и сложность перестройки параметров фильтров ограничивают область их применения.
На смену аналоговым РЭС в 40-х годах пришли устройства дискретной обработки аналоговых входных процессов. Эти устройства обеспечивают дискретно-аналоговую обработку (ДАО) сигналов и обладают большими возможностями. Здесь применяется сигнал дискретный по времени, непрерывный по состояниям. Такой сигнал Z’(kT) представляет собой последовательность импульсов с амплитудами, равными значениям аналогового сигнала Z’(t) в дискретные моменты времени t=kT, где k=0,1,2,… - целые числа. Переход от непрерывного сигнала Z’(t) к последовательности импульсов Z’(kT) называется дискретизацией по времени.
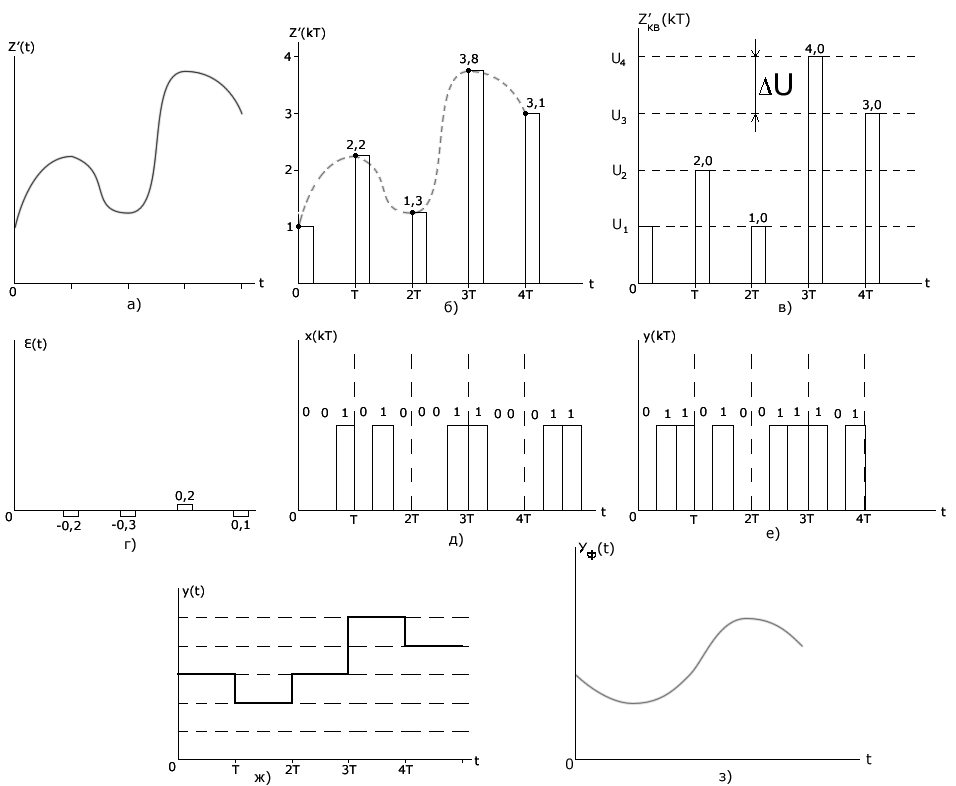
Рисунок 2.10 Аналоговые, дискретные и цифровые сигналы
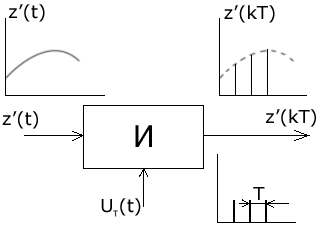
Рисунок 2.11 Дискретизация аналогового сигнала
Дискретизацию аналогового сигнала по времени может выполнить каскад совпадения «И» (рис. 2.11), на входе которого действует аналоговый сигнал Z’(t). Управляется каскад совпадения тактовым напряжением UT(t) – короткими импульсами длительностью и, следующими с интервалами T>>и.
Интервал дискретизации Т выбирается в соответствии с теоремой Котельникова T=1/2Fmax, где Fmax – максимальная частота в спектре аналогового сигнала. Частоту fд = 1/Т называют частотой дискретизации, а совокупность значений сигнала при 0, Т, 2Т,… - сигналом с амплитудо-импульсной модуляцией (АИМ).
До конца 50-х годов сигналы АИМ применялись только при преобразовании речевых сигналов. Для передачи по каналу радиорелейной связи АИМ сигнал преобразовывают в сигнал с фазоимпульсной модуляцией (ФИМ). При этом амплитуда импульсов постоянная, а информация о речевом сообщении содержится в отклонении (фазе) импульса относительно некоторого среднего положения. Используя короткие импульсы одного сигнала, и, размещая между ними импульсы других сигналов, получают многоканальную связь (но не более 60 каналов).
В настоящее время ДАО усиленно развивается на основе применения «пожарных цепочек» (ПЦ) и приборов с зарядными связями (ПЗС).
В начале 70-х годов на сетях связи различных стран и СССР стали появляться системы с импульсно-кодовой модуляцией (ИКМ), где применяются сигналы в цифровой форме.
Процесс ИКМ представляет собой преобразование аналогового сигнала в цифры, состоит из трёх операций: дискретизация по времени через интервалы Т (рис.2.10,б), квантование по уровню (рис. 2.10,в) и кодирования (рис. 2.10,д). Операция дискретизации по времени рассмотрена выше. Операция квантования по уровню заключается в том, что последовательность импульсов, амплитуды которых соответствуют значениям аналогового 3 сигнала в дискретные моменты времени, заменяется последовательностью импульсов амплитуды которых могут принимать только ограниченное число фиксированных значений. Эта операция приводит к ошибке квантования (рис.2.10,г).
Сигнал ZКВ’(kT) является дискретным сигналом как по времени, так и по состояниям. Возможные значения u0, u1,…,uN-1 сигнала Z’(kT) на приёмной стороне известны, поэтому передают не значения uk, которое сигнал принял на интервале Т, а только его номер уровня k. На приёмной стороне по принятому номеру k восстанавливают значение uk. В этом случае передаче подлежат последовательности чисел в двоичной системе счисления – кодовые слова.
Процесс кодирования заключается в преобразовании квантованного сигнала Z’(kT) в последовательность кодовых слов {x(kT)}. На рис. 2.10,д изображены кодовые слова в виде последовательности двоичных кодовых комбинаций при использовании трёх разрядов.
Рассмотренные операции ИКМ применяются в РПУ с ЦОС, при этом ИКМ необходима не только для аналоговых сигналов, но и для цифровых.
Покажем необходимость ИКМ при приёме цифровых сигналов по радиоканалу. Так, при передаче в декаметровом диапазоне элемент xxxxxxxxxxxxxxxxxxxxxxа цифрового сигнала xi(kT) (i=0,1), отражающего n-ой элемент кода, ожидаемый сигнал на входе РПУ вместе с аддитивной помехой ξ(t) можно представить в виде:
z/i(t)= µx(kT) + ξ(t) , (2.2)
при (0 ≤ t ≥ TЭ),
где μ- коэффициент передачи канала, ТЭ – время длительности элемента сигнала. Из (2.2) видно, что помехи на входе РПУ образуют множество сигналов, представляющих собой аналоговое колебание.
Примерами цифровых схем являются логические элементы, регистры, триггеры, счетчики, запоминающие устройства и др. По количеству узлов на ИС и БИС, РПУ с ЦОС делят на две группы:
1. Аналого-цифровые РПУ, которые имеют реализованные на ИС отдельные узлы: синтезатор частоты, фильтры, демодулятор, АРУ и др.
.2. Цифровые радиоприёмные устройства (ЦРПУ), в которых сигнал обрабатывается после аналого-цифрового преобразователя (АЦП).
На рис. 2.12 показаны элементы основного (информационного канала) ЦРПУ декаметрового диапазона:: аналоговая часть приёмного тракта (АЧПТ), АЦП (состоящий из дискретизатора, квантователя и кодера), цифровая часть приёмного тракта (ЦЧПТ), цифро-аналоговый преобразователь (ЦАП) и фильтр нижних частот (ФНЧ). Двойные линии обозначают передачу цифровых сигналов (кодов), а одинарные – аналоговых и АИМ сигналов.
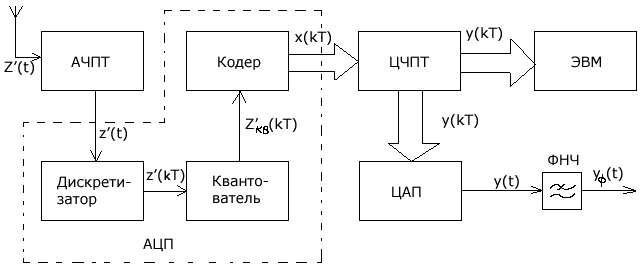
Рисунок 2.12 Элементы основного (информационного канала) ЦРПУ декаметрового диапазона
АЧПТ производит предварительную частотную избирательность, значительное усиление и преобразование сигнала Z’(T) по частоте. АЦП преобразует аналоговый сигнал Z’(T) в цифровой x(kT) (рис. 2.10,д).
В ЦЧПТ как правило производится дополнительное преобразование по частоте, избирательность (в цифровом фильтре – основной избирательности) и цифровая демодуляция аналоговых и дискретных сообщений (частотной, относительной фазовой и амплитудной телеграфии). На выходе ЦЧПТ получаем цифровой сигнал y(kT) (рис. 2.10,е). Этот сигнал, обработанный по заданному алгоритму, с выхода ЦЧПТ поступает в ЦАП или в запоминающее устройство ЭВМ (при приёме данных).
В последовательно включённых ЦАП и ФНЧ, цифровой сигнал y(kT) преобразуется вначале в непрерывный по времени и дискретный по состояниям сигнал y(t), а затем в yФ(t), который непрерывный по времени и по состояниям (рис. 2.10,ж, з).