Файл: Г.М. Гринфельд ТЕОРИЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ уч. пособие.doc
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 29.07.2024
Просмотров: 644
Скачиваний: 3
СОДЕРЖАНИЕ
1. ОсновНые понятия и определения теории автоматического управления
1.1. Краткие сведения по истории развития систем автоматического управления
1.2. Обобщенная структурная схема сау
2. Математическое описание линейных сау
2.1. Составление и линеаризация дифференциальных уравнений сау
Основные свойства (теоремы) преобразования Лапласа
Изображения по Лапласу типовых сигналов
2.3. Временные и частотные характеристики звеньев и систем
2.4. Элементарные звенья систем автоматического управления
Пропорциональное (усилительное, безинерционное, масштабирующее) звено
Идеальное дифференцирующее звено
Апериодическое звено первого порядка
Реальное дифференцирующее звено
Инерционное звено второго порядка
Интегро-дифференцирующее звено
Пропорционально-интегральный регулятор (пи-регулятор)
2.5. Неминимально-фазовые звенья
2.6. Эквивалентные преобразования структурных схем линейных сау
2.7. Передаточные функции многоконтурных систем
3. Анализ устойчивости линейныхсау
3.1.Понятие устойчивости линейных систем
3.2.Алгебраический критерий устойчивости Гурвица
3.3.Частотные критерии устойчивости Михайлова и Найквиста
3.5.Оценка устойчивости по логарифмическим амплитудно- и фазо-частотным характеристикам
3.6.Устойчивость систем с запаздыванием
4. Качество динамических характеристик сау
4.1. Показатели качества процесса регулирования
4.2. Частотные критерии качества
4.3. Корневые критерии качества
4.4. Интегральные критерии качества
5.1. Стационарные режимы сау. Передаточные функции статических и астатических систем
5.2. Коэффициенты ошибки системы
5.3. Системы комбинированного управления
6. Анализ сау в пространстве состояния
6.1. Основные положения метода переменных состояния
6.2. Способы построения схем переменных состояния
Метод прямого программирования
Метод параллельного программирования
Метод последовательного программирования
6.3. Решение уравнений состояния линейных стационарных сау. Вычисление фундаментальной матрицы
Последовательные корректирующие звенья
Параллельные корректирующие звенья
7.2. Частотный метод синтеза корректирующих устройств
Построение лах в низкочастотном диапазоне
Построение лах в среднечастотном диапазоне
Зависимость колебательности от значений hи h1
Построение лах в высокочастотном диапазоне
7.3. Последовательные корректирующие устройства
7.4. Параллельные корректирующие устройства
7.5. Техническая реализация корректирующих звеньев
Пассивные четырехполюсники постоянного тока
Пассивные корректирующие четырехполюсники
Активные корректирующие звенья
Активные четырехполюсники постоянного тока
8. Нелинейные системы автоматического управления
8.1. Особенности нелинейных систем и методы их анализа
8.2. Исследование нелинейных систем на фазовой плоскости
8.3. Метод гармонической линеаризации нелинейных звеньев
Коэффициенты гармонической линеаризации типовых нелинейностей
8.5. Методы определения параметров автоколебаний
Задание для расчета линейной caу
Варианты задания для расчета линейной сау
Варианты передаточных функций линейной сау
Задание для расчета нелинейной сау
Варианты задания для расчета нелинейной сау
Варианты структурных схем нелинейных систем Варианты статических характеристик нелинейного элемента
A(ω) = |W(jω)| и φ(ω) = argW(jω). (2.30)
Очевидно, что на приведенных зависимостях между характеристиками основывалась рассмотренная методика построении W(jω) по A(ω) и φ(ω).
Комплексное выражение для W(jω) может быть представлено, как в форме (2.29), так и в виде:
W(jω) = P(ω) + jQ(ω), (2.31)
где P(ω), Q(ω) – соответственно вещественная и мнимая частотные характеристики системы.
Таким образом, получаем всего пять частотных характеристик: амплитудно-фазовую W(jω), амплитудно-частотную A(ω), фазо-частотную φ(ω), вещественную частотную P(ω) и мнимую частотную Q(ω). Между этими характеристиками, кроме зависимостей (2.30) – (2.31), имеются следующие очевидные связи:
![]() ;
(2.32)
;
(2.32)
![]() (2.33)
(2.33)
![]() .
(2.34)
.
(2.34)
Частотные характеристики системы не зависят от времени. В этом их принципиальное отличие от временных характеристик. Если временные характеристики определяют поведение системы в переходном процессе при различных типовых входных воздействиях, то частотные выражают зависимость параметров установившихся выходных синусоидальных колебаний от тех же параметров входных колебаний при различных частотах.
Частотные характеристики широко используются в инженерной практике при анализе и синтезе САУ. Особым их достоинством является то, что они могут быть получены экспериментальным путем, что особенно важно для систем, аналитические уравнения которых не представляется возможным получить из-за их сложности или малоизученности технологического процесса.
Несмотря на то, что частотные характеристики, например W(jω),отображают только установившиеся процессы в системе, они в полной мере определяет и ее динамические свойства.
Подставляя
производные сигналов
![]() (t)и
(t)и![]() равные
равные
![]()
![]() ….
….
![]()
![]()
![]() ….
….
![]() ,
,
в дифференциальное уравнение (2.5), получим:
![]()
![]() =
=
= ![]()
![]() .
.
Из полученного выражения определяем АФХ системы:

![]() .
(2.35)
.
(2.35)
Сравнивая выражения (2.18) и (2.35) делаем заключение, что выражения для АФЧХ W(jω)системы может быть получено по ее передаточной функцииW(p), в которой достаточно переменнуюp заменить на jω:
W(
jω) =
![]() .(2.36)
.(2.36)
Если в выражении (2.18) осуществить аналогичную замену p на jω, получим:
![]() ,
(2.37)
,
(2.37)
где
![]() и
и![]() – изображения Фурье входного и выходного
сигналов.
– изображения Фурье входного и выходного
сигналов.
На
основании выражения (2.37) амплитудно-фазовую
частотную характеристику
![]() можно определить как отношение изображений
Фурье выходного и входного сигналов
системы при нулевых начальных условиях:
можно определить как отношение изображений
Фурье выходного и входного сигналов
системы при нулевых начальных условиях:
![]() .
.
Выражению
(2.26), связывающему с помощью преобразования
Лапласа передаточную функцию системы
с ее временной характеристикой –
функцией веса
![]() ,
соответствуют следующие зависимости
для амплитудно-фазовой частотной
характеристики:
,
соответствуют следующие зависимости
для амплитудно-фазовой частотной
характеристики:
![]() (2.38)
(2.38)
и
![]() (2.39)
(2.39)
Первое
выражение определяет амплитудно-фазовую
частотную характеристику системы по
его весовой функции, а второе, наоборот,
– весовую функцию по
![]() .
По частотным характеристикам САУ можно
непосредственно определить ее реакцию
не только на импульсное воздействие,
но и на входное воздействие любого вида.
.
По частотным характеристикам САУ можно
непосредственно определить ее реакцию
не только на импульсное воздействие,
но и на входное воздействие любого вида.
Преобразуя выражение (2.35), в котором приняты следующие обозначения:
A(jω)=![]() ;
;
B(jω)=
![]()
получим:
![]() ,
(2.40)
,
(2.40)
где
индексами
![]() и
и
![]() отмечены действительные (U)
и мнимые (V)
части соответствующих комплексных
величин в числителе и знаменателе.
отмечены действительные (U)
и мнимые (V)
части соответствующих комплексных
величин в числителе и знаменателе.
Преобразуя (2.40), окончательно имеем:
 ,
,
где:
Для инженерных расчетов особенно широко используются частотные характеристики, построенные в логарифмическом масштабе, в том числе логарифмическая амплитудно-частотная L(ω), связанная с АЧХ системы зависимостью:
L(ω) = 20lg A(ω). (2.41)
Смысл приведенного выражения заключается в следующем. Определим усиление системой мощности сигнала, в виде отношения мощности на выходе Рвых к мощности на входе Рвх. Этот показатель, для удобства оцениваемый в логарифмическом масштабе, с учетом того, что мощность сигнала пропорциональна квадрату его амплитуды, записывается в виде:
 .
.
В качестве единицы усиления или ослабления мощности сигнала при прохождении его через какое-либо устройство принят Бел (по имени американского
Рис.
2.6.
Логарифмическая
амплитудно-частотная L(ω)
и фазо-частотная
![]() характеристики в совмещенной системе
координат
характеристики в совмещенной системе
координат
изобретателя А. Белла). Но поскольку 1 Бел является слишком крупной единицей (ей соответствует изменение мощности в десять раз), в теории автоматического регулирования за единицу измерения принят децибел 1 дБ = 0,1 Б.
С учетом этого можно записать:
![]() ,
,
где величина L(ω ) выражена в децибелах.
Используемая
совместно с L(ω
) фазо-частотная
характеристика
![]() строится в полулогарифмическом масштабе:
по оси ординат откладывается значение
фазы в градусах или радианах, а по оси
абсцисс –
строится в полулогарифмическом масштабе:
по оси ординат откладывается значение
фазы в градусах или радианах, а по оси
абсцисс –![]() .
При этом единицей измерения частоты
являетсядекада.
Декадой
называется
частотный интервал, граничные значения
которого соотносятся в десять раз. В
логарифмическом масштабе частот отрезок
в одну декаду не зависит от частоты и
имеет длину, равную единице.
.
При этом единицей измерения частоты
являетсядекада.
Декадой
называется
частотный интервал, граничные значения
которого соотносятся в десять раз. В
логарифмическом масштабе частот отрезок
в одну декаду не зависит от частоты и
имеет длину, равную единице.
При
решении практических задач на оси
абсцисс указываются не значения lgω,
а, что более удобно, значения самой
частоты ω.
Очевидно, что при использовании
логарифмического масштаба точка на оси
абсцисс, соответствующая ω
= 0, находится слева в бесконечности,
т.е. логарифмические характеристики
строятся не от нулевой частоты, а от
некоторого значения, которое определяется
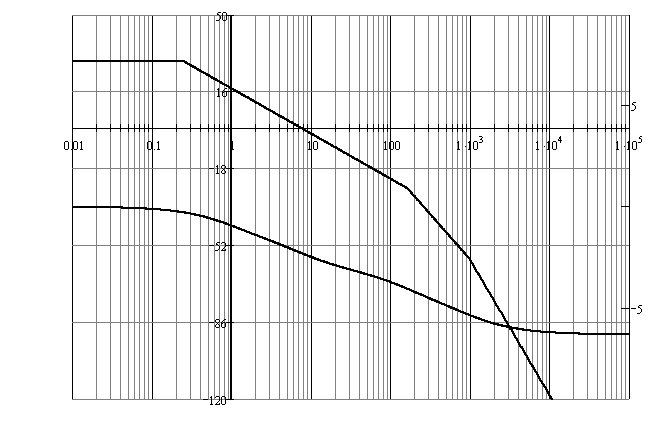
данными конкретной задачи. На рис. 2.6
приведен примерный вид логарифмической
амплитудно-частотной характеристики
L(ω)
и фазо-частотной
характеристик
![]() ,
построенных в совмещенной системе
координат.
,
построенных в совмещенной системе
координат.
В дальнейшем для краткости будем в названии различных частотных характеристик опускать слово «частотная», говоря просто о логарифмической амплитудной характеристике L(ω) (ЛАХ), амплитудно-фазовой характеристике W(jω) (АФХ) и т.п.
2.4. Элементарные звенья систем автоматического управления
Математическое описание системы начинают с разбиения ее на звенья и составления математических моделей этих звеньев. При этом передаточная функция, временные и частотные характеристики, которыми описываются звено, не учитывают его физической природы, т.е. рассматривается математическая модель, а не реальное конструктивное исполнение и принципы работы звена. Очевидно, что при составлении математического описания системы целесообразно ориентироваться на математические модели звеньев стандартного вида, так называемые типовые звенья. Рассмотрим их основные характеристики.
Пропорциональное (усилительное, безинерционное, масштабирующее) звено
Пропорциональное (усилительное, безинерционное, масштабирующее) звено – это звено, выходной сигнал которого пропорционален входному сигналу:
![]() ,
,
где k – коэффициент усиления звена.
Операторное уравнение звена:
![]()
а его передаточная функция:
W(p) = k.
Амплитудно-фазовая характеристика: W(jω)= k.
Соответственно вещественная и мнимая частотные характеристики:
Р(ω) = k, Q(ω) = 0.
Амплитудно- и фазо-частотная характеристики звена:
A(ω)
=![]() ,
,
![]() .
.
Переходная функция звена (рис. 2.7а):
![]() .
.
Логарифмическая АЧХ звена в соответствии с выражениями (2.41):
![]() .
.
Графики логарифмической амплитудно- и фазо-частотной характеристик приведены на рис.2.7б.
Примерами технической реализации пропорциональных звеньев являются потенциометр, полупроводниковый усилитель, зубчатая передача и т.п.
Рис.
2.7а
a)
Переходная функция пропорционального
звена
б)
Логарифмические амплитудно- и
фазо-частотная характеристики
пропорционального
звена
Рис.
2.7б