Файл: Г.М. Гринфельд ТЕОРИЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ уч. пособие.doc
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 29.07.2024
Просмотров: 635
Скачиваний: 3
СОДЕРЖАНИЕ
1. ОсновНые понятия и определения теории автоматического управления
1.1. Краткие сведения по истории развития систем автоматического управления
1.2. Обобщенная структурная схема сау
2. Математическое описание линейных сау
2.1. Составление и линеаризация дифференциальных уравнений сау
Основные свойства (теоремы) преобразования Лапласа
Изображения по Лапласу типовых сигналов
2.3. Временные и частотные характеристики звеньев и систем
2.4. Элементарные звенья систем автоматического управления
Пропорциональное (усилительное, безинерционное, масштабирующее) звено
Идеальное дифференцирующее звено
Апериодическое звено первого порядка
Реальное дифференцирующее звено
Инерционное звено второго порядка
Интегро-дифференцирующее звено
Пропорционально-интегральный регулятор (пи-регулятор)
2.5. Неминимально-фазовые звенья
2.6. Эквивалентные преобразования структурных схем линейных сау
2.7. Передаточные функции многоконтурных систем
3. Анализ устойчивости линейныхсау
3.1.Понятие устойчивости линейных систем
3.2.Алгебраический критерий устойчивости Гурвица
3.3.Частотные критерии устойчивости Михайлова и Найквиста
3.5.Оценка устойчивости по логарифмическим амплитудно- и фазо-частотным характеристикам
3.6.Устойчивость систем с запаздыванием
4. Качество динамических характеристик сау
4.1. Показатели качества процесса регулирования
4.2. Частотные критерии качества
4.3. Корневые критерии качества
4.4. Интегральные критерии качества
5.1. Стационарные режимы сау. Передаточные функции статических и астатических систем
5.2. Коэффициенты ошибки системы
5.3. Системы комбинированного управления
6. Анализ сау в пространстве состояния
6.1. Основные положения метода переменных состояния
6.2. Способы построения схем переменных состояния
Метод прямого программирования
Метод параллельного программирования
Метод последовательного программирования
6.3. Решение уравнений состояния линейных стационарных сау. Вычисление фундаментальной матрицы
Последовательные корректирующие звенья
Параллельные корректирующие звенья
7.2. Частотный метод синтеза корректирующих устройств
Построение лах в низкочастотном диапазоне
Построение лах в среднечастотном диапазоне
Зависимость колебательности от значений hи h1
Построение лах в высокочастотном диапазоне
7.3. Последовательные корректирующие устройства
7.4. Параллельные корректирующие устройства
7.5. Техническая реализация корректирующих звеньев
Пассивные четырехполюсники постоянного тока
Пассивные корректирующие четырехполюсники
Активные корректирующие звенья
Активные четырехполюсники постоянного тока
8. Нелинейные системы автоматического управления
8.1. Особенности нелинейных систем и методы их анализа
8.2. Исследование нелинейных систем на фазовой плоскости
8.3. Метод гармонической линеаризации нелинейных звеньев
Коэффициенты гармонической линеаризации типовых нелинейностей
8.5. Методы определения параметров автоколебаний
Задание для расчета линейной caу
Варианты задания для расчета линейной сау
Варианты передаточных функций линейной сау
Задание для расчета нелинейной сау
Варианты задания для расчета нелинейной сау
Варианты структурных схем нелинейных систем Варианты статических характеристик нелинейного элемента
5.2. Коэффициенты ошибки системы
Разложим передаточную функцию по ошибке в ряд по возрастающим степеням p:
![]()
Тогда
![]() – изображение ошибки может быть записано
в виде:
– изображение ошибки может быть записано
в виде:
![]() ,
,
следовательно,
![]() .
.
Коэффициенты
![]() называютсякоэффициентами
ошибки:
называютсякоэффициентами
ошибки:
![]() -
коэффициент ошибки по положению;
-
коэффициент ошибки по положению;![]() -
коэффициент ошибки по скорости;
-
коэффициент ошибки по скорости;![]() -
коэффициент ошибки по ускорению.
-
коэффициент ошибки по ускорению.
Если
с достаточной точностью входной сигнал
![]() (t)
можно
представить в виде:
(t)
можно
представить в виде:
![]() ,
,
то
в разложении передаточной функции
![]() следует ограничиться конечным числом
членов.
следует ограничиться конечным числом
членов.
Значения коэффициентов ошибки можно вычислить различными способами, например, используя следующие выражения:
![]() |
p
= 0;
|
p
= 0; ![]() |
p
= 0;
|
p
= 0; ![]() |
p
= 0
и т.д.
|
p
= 0
и т.д.
В
статической системе
![]() ;
в астатической системе с астатизмом
первого порядка
;
в астатической системе с астатизмом
первого порядка![]() ;
в астатической системе с астатизмом
второго порядка
;
в астатической системе с астатизмом
второго порядка![]() .
.
5.3. Системы комбинированного управления
Использование принципа комбинированного управления, наряду с отмеченными подходами, позволяет повысить точность САУ. В системах, построенных по этому принципу, управляющее воздействие на объект управления зависит как от ошибки регулирования, так от внешнего воздействия.
Теоретически в системах с комбинированным управлением величину установившейся ошибки можно свести к нулю при произвольном внешнем воздействии. Это свойство называется инвариантностью системы по отношению к внешнему воздействию. Поскольку внешним воздействием на систему может быть как управляющий, так и возмущающий сигнал, различают системы инвариантные по управлению и по возмущению.
Передаточная функция системы комбинированного управления по управляющему воздействию (рис. 5.3):
Ф(р)
=
![]() .
(5.3)
.
(5.3)
Передаточная функция этой системы без учета канала комбинированного управления (полагая Wк(р) = 0):
ФбезКУ(р)
=
![]() .
(5.4)
.
(5.4)
Х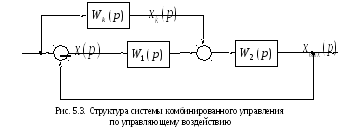 арактеристические
полиномы передаточных функций (5.3) и
(5.4) совпадают, на основании чего можно
сделать заключение о совпадении их
полюсов. Следовательно, введение канала
комбинированного управления, в отличие
от рассмотренных методов, не влияет на
устойчивость системы.
арактеристические
полиномы передаточных функций (5.3) и
(5.4) совпадают, на основании чего можно
сделать заключение о совпадении их
полюсов. Следовательно, введение канала
комбинированного управления, в отличие
от рассмотренных методов, не влияет на
устойчивость системы.
Передаточная функция системы комбинированного управления по ошибке:
![]() .
(5.5)
.
(5.5)
Очевидно, что в том случае, когда передаточная функции канала комбинированного управления равна:
![]() ,
(5.6)
,
(5.6)
передаточная функция (5.5), а следовательно, и ошибка регулирования в системе при любой форме управляющего воздействия будет равняется нулю. Такая инвариантность называется абсолютной (полной).
Рассмотрим в качестве примера систему комбинированного управления по управляющему воздействию (см. рис. 5.3), в которой
![]() и
и ![]() .
.
Передаточная функция такой системы по ошибке равна:
![]() .
(5.7)
.
(5.7)
Рассматриваемая система – астатическая с астатизмом первого порядка.
Передаточная функция канала комбинированного управления для обеспечения полной инвариантности согласно выражению (5.6) должна быть равна:
![]()
![]() (5.8)
(5.8)
где
![]()
Изображение
по Лапласу сигнала
![]() на
выходе звена с передаточной функцией
на
выходе звена с передаточной функцией![]() равно:
равно:
![]() ,
,
и с учетом выражения (5.8) изображение сигнала в канале комбинированного управления равно:
![]()
![]()
а соответствующий ему оригинал:
![]()
![]()
Следовательно,
сигнал, подаваемый в систему по каналу
комбинированного управления, равен
сумме двух составляющих, пропорциональных
производным управляющего сигнала по
времени, соответственно первого и
второй порядка. Порядок передаточной
функции
![]() может
быть гораздо выше второго, что приведет
к необходимости многократного
дифференцирования управляющего сигнала.
может
быть гораздо выше второго, что приведет
к необходимости многократного
дифференцирования управляющего сигнала.
Практическое использование принципа комбинированного управления ограничено тем, что в реальных технических САУ на полезные сигналы накладываются высокочастотные помехи. При этом выполнение операции дифференцирования приводит к увеличению уровня помех, возрастающего по мере увеличения порядка производной. Понизив порядок старшей производной до значения, приемлемого по соображениям помехоустойчивости, можно обеспечить частичную инвариантность системы, что позволяет существенно уменьшить ошибку системы регулирования.
Если в рассмотренном примере ограничиться только первой производной управляющего воздействия, т.е. подавать в систему по каналу комбинированного управления сигнал
![]() ,
,
получим,
что
![]()
![]() .
При этом, в соответствии с выражением(5.5),
передаточная функция системы по ошибке
будет равна:
.
При этом, в соответствии с выражением(5.5),
передаточная функция системы по ошибке
будет равна:
![]() .
(5.9)
.
(5.9)
На основании сравнения выражений (5.7) и (5.9) можно сделать заключение, что порядок астатизма системы увеличился с первого до второго без снижения ее устойчивости.
П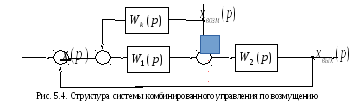 ередаточная
функция по ошибкесистемы
комбинированного управления по возмущению
(рис.
5.4) имеет вид:
ередаточная
функция по ошибкесистемы
комбинированного управления по возмущению
(рис.
5.4) имеет вид:
Фх(р)
=
![]()
![]() .
(5.10)
.
(5.10)
С целью обеспечения абсолютной инвариантности по возмущению передаточная функция звена в канале комбинированного управления должна быть равной:
![]() .
(5.11)
.
(5.11)
И в этом случае на практике ограничиваются частичной инвариантностью, если точное удовлетворение условию вызывает технические трудности.
При
обеспечении инвариантности по возмущению
особая трудность заключается в том, что
возмущающие
воздействия
![]() в
отличие от задающих
далеко
не всегда можно подать на вход
в
отличие от задающих
далеко
не всегда можно подать на вход
![]() .
Действительно, для этого нужно уметь
измерять
.
Действительно, для этого нужно уметь
измерять![]() ,
что невсегда
возможно или технически трудно реализуемо
(например, усилие резания при
металлообработке, величина ветровой
нагрузки, действующей
на самолет при автоматическом регулировании
курса).
Существуют косвенные методы измерения
,
что невсегда
возможно или технически трудно реализуемо
(например, усилие резания при
металлообработке, величина ветровой
нагрузки, действующей
на самолет при автоматическом регулировании
курса).
Существуют косвенные методы измерения![]() ,
которые
широко используются на практике.
,
которые
широко используются на практике.
Вопросы для самопроверки
По каким характеристикам САУ может быть осуществлена их классификация на статические и астатические?
Укажите, как определить порядок астатизма системы по
 ;
поФх(р);
по значениям коэффициентов ошибки.
;
поФх(р);
по значениям коэффициентов ошибки.Чему равна ошибка по скорости в астатической системе с астатизмом второго порядка?
Назовите основные методы, обеспечивающие повышение точности САУ.
Как влияет использование комбинированного управления на устойчивость САУ?
С чем связано ограничение, обусловливающее невозможность достижения абсолютной инвариантности системы?
6. Анализ сау в пространстве состояния
6.1. Основные положения метода переменных состояния
Рассмотрим основные положения метода переменных состояния и его применение для анализа САУ. С математической точки зрения это предполагает использование методов матричного исчисления и векторного анализа. Подход, основанный на понятии переменных состояния системы, особенно удобен для описания многосвязных или нестационарных линейных систем, а также нелинейных систем, исследование которых с помощью методов, базирующихся на использовании передаточных функций и частотных характеристик САУ, часто бывает затруднительным. Использование математического аппарата теории матриц и матричных уравнений позволяет получить основные зависимости в компактном виде, удобном для исследования систем на ЦВМ.
Основное
положение метода переменных состояния
заключается в следующем. Для полного
математического описания динамической
системы
![]() -го
порядка необходимо ввести в рассмотрение
-го
порядка необходимо ввести в рассмотрение![]() независимых переменных состояния
системы
независимых переменных состояния
системы![]() .
Эти переменные должны быть выбраны так,
чтобы, зная начальное состояние системы
.
Эти переменные должны быть выбраны так,
чтобы, зная начальное состояние системы![]() в моментt
= t0,
можно
было бы при известных на интервале t0
≤ t
≤ t1
входных
воздействиях
в моментt
= t0,
можно
было бы при известных на интервале t0
≤ t
≤ t1
входных
воздействиях
![]() ,
определить состояние
,
определить состояние![]() в момент времени
в момент времени![]() .
.