Файл: Г.М. Гринфельд ТЕОРИЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ уч. пособие.doc
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 29.07.2024
Просмотров: 649
Скачиваний: 3
СОДЕРЖАНИЕ
1. ОсновНые понятия и определения теории автоматического управления
1.1. Краткие сведения по истории развития систем автоматического управления
1.2. Обобщенная структурная схема сау
2. Математическое описание линейных сау
2.1. Составление и линеаризация дифференциальных уравнений сау
Основные свойства (теоремы) преобразования Лапласа
Изображения по Лапласу типовых сигналов
2.3. Временные и частотные характеристики звеньев и систем
2.4. Элементарные звенья систем автоматического управления
Пропорциональное (усилительное, безинерционное, масштабирующее) звено
Идеальное дифференцирующее звено
Апериодическое звено первого порядка
Реальное дифференцирующее звено
Инерционное звено второго порядка
Интегро-дифференцирующее звено
Пропорционально-интегральный регулятор (пи-регулятор)
2.5. Неминимально-фазовые звенья
2.6. Эквивалентные преобразования структурных схем линейных сау
2.7. Передаточные функции многоконтурных систем
3. Анализ устойчивости линейныхсау
3.1.Понятие устойчивости линейных систем
3.2.Алгебраический критерий устойчивости Гурвица
3.3.Частотные критерии устойчивости Михайлова и Найквиста
3.5.Оценка устойчивости по логарифмическим амплитудно- и фазо-частотным характеристикам
3.6.Устойчивость систем с запаздыванием
4. Качество динамических характеристик сау
4.1. Показатели качества процесса регулирования
4.2. Частотные критерии качества
4.3. Корневые критерии качества
4.4. Интегральные критерии качества
5.1. Стационарные режимы сау. Передаточные функции статических и астатических систем
5.2. Коэффициенты ошибки системы
5.3. Системы комбинированного управления
6. Анализ сау в пространстве состояния
6.1. Основные положения метода переменных состояния
6.2. Способы построения схем переменных состояния
Метод прямого программирования
Метод параллельного программирования
Метод последовательного программирования
6.3. Решение уравнений состояния линейных стационарных сау. Вычисление фундаментальной матрицы
Последовательные корректирующие звенья
Параллельные корректирующие звенья
7.2. Частотный метод синтеза корректирующих устройств
Построение лах в низкочастотном диапазоне
Построение лах в среднечастотном диапазоне
Зависимость колебательности от значений hи h1
Построение лах в высокочастотном диапазоне
7.3. Последовательные корректирующие устройства
7.4. Параллельные корректирующие устройства
7.5. Техническая реализация корректирующих звеньев
Пассивные четырехполюсники постоянного тока
Пассивные корректирующие четырехполюсники
Активные корректирующие звенья
Активные четырехполюсники постоянного тока
8. Нелинейные системы автоматического управления
8.1. Особенности нелинейных систем и методы их анализа
8.2. Исследование нелинейных систем на фазовой плоскости
8.3. Метод гармонической линеаризации нелинейных звеньев
Коэффициенты гармонической линеаризации типовых нелинейностей
8.5. Методы определения параметров автоколебаний
Задание для расчета линейной caу
Варианты задания для расчета линейной сау
Варианты передаточных функций линейной сау
Задание для расчета нелинейной сау
Варианты задания для расчета нелинейной сау
Варианты структурных схем нелинейных систем Варианты статических характеристик нелинейного элемента
![]()
с
дифференцирующими свойствами в
среднечастотном диапазоне (![]() >
>![]() ).
Параметры корректирующего звена
определяются следующим образом:
).
Параметры корректирующего звена
определяются следующим образом:
![]() ;
;
![]()
![]() .
.
Значения
сопрягающих частот
![]() и
и
![]() ,
а также величина
,
а также величина![]() берутся из рис. 7.7.
берутся из рис. 7.7.
Д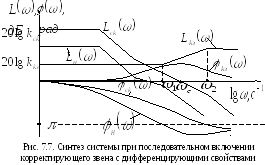 ля
уточнения действительного запаса
устойчивости по модулю и фазе
синтезированной системы на рис.7.7
построена логарифмическая фазо-частотная
характеристика
ля
уточнения действительного запаса
устойчивости по модулю и фазе
синтезированной системы на рис.7.7
построена логарифмическая фазо-частотная
характеристика![]() .
Как видно из рис. 7.7, запасы устойчивости
по фазе и по модулю скорректированной
системы больше соответствующих запасов
устойчивости
исходной
системы.
.
Как видно из рис. 7.7, запасы устойчивости
по фазе и по модулю скорректированной
системы больше соответствующих запасов
устойчивости
исходной
системы.
Из
рассмотренного примера следует, что
достоинство коррекции с помощью
последовательных дифференцирующих
устройств заключается в том, что при
обеспечении требуемого запаса устойчивости
одновременно увеличивается частота
среза
![]() и
возможно увеличение коэффициента
усиления системы, в результате чего
уменьшаются время регулирования и
установившаяся ошибка.
и
возможно увеличение коэффициента
усиления системы, в результате чего
уменьшаются время регулирования и
установившаяся ошибка.
Однако последовательная коррекция с помощью дифференцирующих устройств имеет и недостатки, заключающиеся в значительном увеличении усиления в области высоких частот. Если при этом на полезный входной сигнал системы накладываются высокочастотные помехи, степень их подавления в скорректированной системе будет ниже, чем в нескорректированной. Помехоустойчивость системы может быть повышена путем снижения коэффициента усиления системы, но это приведет к снижению точности регулирования.
Для
исключения существенного ослабления
коэффициента усиления системы на низких
частотах в качестве последовательного
корректирующего звена можно использовать
интегро-дифференцирующее звено с
преобладающими интегрирующими свойствами,
т.е. при
![]() <
<![]() (рис. 7.8).
(рис. 7.8).
Как видно из рис. 7.8, исходная нескорректированная система не только не обеспечивает требуемого качества регулирования, но даже является неустойчивой. Без корректирующего устройства требуемый запас устойчивости в системе можно обеспечить только за счет большого снижения коэффициента усиления системы, что является нежелательным.
Желаемую ЛАХ скорректированной системы можно получить при последовательном включении корректирующего устройства с интегрирующими свойствами. Из рис. 7.8 следует, что наряду с относительным увеличением коэффициента усиления системы на низких частотах существенно уменьшено усиление на высоких частотах и тем самым ослаблено влияние высокочастотных помех.
Н
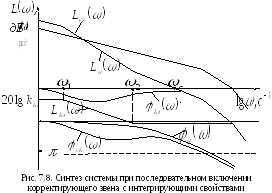 едостатком
таких корректирующих устройств является
то, что при их использовании уменьшается
частота среза и, следовательно,
длительность переходных процессов в
системе увеличивается.
едостатком
таких корректирующих устройств является
то, что при их использовании уменьшается
частота среза и, следовательно,
длительность переходных процессов в
системе увеличивается.
При решении практических инженерных задач по синтезу структуры САУ широкое применение находят последовательные корректирующие устройства в виде комбинированных интегро-дифференцирующих звеньев.
Пример синтеза желаемых логарифмических частотных характеристик системы с помощью последовательного комбинированного интегро-дифференцирующего звена представлен на рис. 7.9.
Из
рис. 7.9 следует, что при правильно
выбранных параметрах корректирующего
устройства можно обеспечить требуемую
точность регулирования в установившихся
режимах и одновременно повысить качество
переходного процесса, по сравнению с
исходной системой. Передаточная функция
корректирующего звена с ЛАХ
![]() ,
приведенной на рис. 7.9, равна:
,
приведенной на рис. 7.9, равна:
![]()
![]() .
.
При
выборе коэффициента усиления
корректирующего устройства
![]() следует
исходить из условия обеспечения требуемой
точности в установившихся режимах
скорректированной системы. Так, если
коэффициент передачи исходной
нескорректированной разомкнутой системы
равен
следует
исходить из условия обеспечения требуемой
точности в установившихся режимах
скорректированной системы. Так, если
коэффициент передачи исходной
нескорректированной разомкнутой системы
равен![]() ,
а
требуемый
коэффициент передачи скорректированной
системы равен
,
а
требуемый
коэффициент передачи скорректированной
системы равен
![]() ,
то коэффициент передачи корректирующего
устройства должен быть равен:
,
то коэффициент передачи корректирующего
устройства должен быть равен:
![]() .
.
Постоянные
времени корректирующего устройства
![]() и
и![]() необходимо выбирать так, чтобы частоты
сопряжения
необходимо выбирать так, чтобы частоты
сопряжения![]() и
и![]() были бы значительно меньше частоты
среза
были бы значительно меньше частоты
среза![]() скорректированной системы. Этим
обеспечивается сдвиг интервала частот,
в котором корректирующее устройство
создает отставание по фазе в безопасную
зону слева от частоты среза.
скорректированной системы. Этим
обеспечивается сдвиг интервала частот,
в котором корректирующее устройство
создает отставание по фазе в безопасную
зону слева от частоты среза.
Частоты
сопряжения
![]() и
и![]() должны быть такими, чтобы частота среза
должны быть такими, чтобы частота среза![]() располагалась бы примерно в середине
интервала частот
располагалась бы примерно в середине
интервала частот![]() <
<![]() <
<![]() .
В этом случае максимальное опережение,
создаваемое корректирующим устройством,
будет в области частоты среза, что
обеспечивает в скорректированной
системе наибольший запас устойчивости
по фазе.
.
В этом случае максимальное опережение,
создаваемое корректирующим устройством,
будет в области частоты среза, что
обеспечивает в скорректированной
системе наибольший запас устойчивости
по фазе.
Зачастую не все из перечисленных рекомендаций по выбору параметров корректирующего устройства удается удовлетворить в полной мере. Поэтому необходимо построить ЛАХ скорректированной системы с учетом фактических логарифмических частотных характеристик корректирующего устройства и проверить, например, путем моделирования системы на ЭВМ, удовлетворяет ли САУ предъявляемым требованиям к качеству регулирования.
7.4. Параллельные корректирующие устройства
Из выражения (7.2) следует, что желаемая АФХ разомкнутой скорректированной системы при параллельном включении корректирующего устройства описывается выражением:
![]() .
(7.10)
.
(7.10)
В
интервале частот, в котором
![]() <<
1, выражение (7.10) можно приближенно
записать в виде:
<<
1, выражение (7.10) можно приближенно
записать в виде:
![]() .
(7.11)
.
(7.11)
Из выражения (7.11) следует, что в этом диапазоне частот параллельное корректирующее устройство практически не влияет на динамические свойства исходной системы.
В
интервале частот, в котором
![]() >>1,
выражение (7.10) приближенно можно записать
в виде:
>>1,
выражение (7.10) приближенно можно записать
в виде:
![]() .
(7.12)
.
(7.12)
Из выражения (7.12) следует, что в этом интервале частот влияние звеньев, охваченных корректирующим устройством в виде обратной связи, на динамические свойства системы практически исключается. Следовательно, корректирующей обратной связью следует охватывать такие звенья системы, которые существенно ухудшают динамические свойства системы.
На основании выражения (7.12) можно записать выражения для логарифмическиих амплитудно- и фазо-частотной характеристик:
![]() ;
(7.13)
;
(7.13)
![]() ,
(7.14)
,
(7.14)
откуда частотные характеристики корректирующего устройства:
![]() ;
(7.15)
;
(7.15)
![]() .
(7.16)
.
(7.16)
По полученным частотным характеристикам корректирующего устройства подбирается наиболее простое в техническом отношении его исполнение.
Если частотные характеристики выбранного корректирующего устройства несколько отличаются от расчетных, то необходимо построить ЛАХ скорректированной системы и проверить, обеспечивается ли в системе требуемое качество регулирования.
Если при этом требуемое качество регулирования не обеспечивается, то можно дополнительно включить последовательно корректирующие устройства. В этом случае при синтезе последовательного корректирующего устройства в качестве исходной следует принимать систему, скорректированную параллельным корректирующим устройством.
Задача синтеза САУ всегда решается неоднозначно, т.е. структура передаточной функции и параметры корректирующего звена могут варьироваться в определенных пределах. Поэтому желательно выполнение поставленной задачи в нескольких вариантах с тем, чтобы из них выбрать наиболее простой для технической реализации, надежности функционирования системы, качества регулирования и удобства эксплуатации.
7.5. Техническая реализация корректирующих звеньев
Корректирующие звенья могут быть выполнены из различных по физической природе элементов: электрических, механических, гидравлических и т. д. Наиболее просто реализуются пассивные и активные корректирующие звенья (четырехполюсники) на базе RС- и RL-элементов.
Пассивные четырехполюсники постоянного тока
Пассивные
четырехполюсники постоянного тока
– это
электрические цепи из резисторов,
конденсаторов и индуктивностей. Общая
схема пассивного четырехполюсника
показана на рис. 7.10. Если его выходное
напряжение
![]() приложено к нагрузке с бесконечно
большим полным сопротивлением
приложено к нагрузке с бесконечно
большим полным сопротивлением![]() ,
то передаточная функция пассивного
четырехполюсника равна:
,
то передаточная функция пассивного
четырехполюсника равна:
![]() ,
(7.17)
,
(7.17)
где
![]() и
и![]() – изображения по Лапласу входного и
выходного напряжений четырехполюсника;
– изображения по Лапласу входного и
выходного напряжений четырехполюсника;![]() – операторы сопротивлений четырехполюсника;
– операторы сопротивлений четырехполюсника;![]() – соответственно активные сопротивления,
емкости и индуктивности.
– соответственно активные сопротивления,
емкости и индуктивности.
И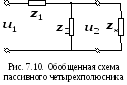 зменяя
вид операторов сопротивлений
зменяя
вид операторов сопротивлений
![]() и значения
и значения![]() ,
можно получить большое количество
четырехполюсников, описываемых
передаточными функциями (7.17). Стоимость
пассивных четырехполюсников низкая, а
стабильность параметров достаточно
высокая. Этими достоинствами объясняется
широкое использование их в системах
автоматического регулирования в качестве
корректирующих звеньев.
,
можно получить большое количество
четырехполюсников, описываемых
передаточными функциями (7.17). Стоимость
пассивных четырехполюсников низкая, а
стабильность параметров достаточно
высокая. Этими достоинствами объясняется
широкое использование их в системах
автоматического регулирования в качестве
корректирующих звеньев.