ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 22.08.2024
Просмотров: 327
Скачиваний: 0
СОДЕРЖАНИЕ
Н. Н. Пустовалова компьютерные информационные технологии лабораторный практикум
Лабораторная работа № 1. Операционная система Windows. Программы группы «Стандартные»
Программы группы «стандартные»
Линейные программы в приложении excel
Компьютерная графика. Приложение ms visio
Вычисление определенных интегралов
Согласно методу трапеций значение интеграла определяется по формуле
Приближенное решение уравнений
Решение систем линейных уравнений
Рассмотрим алгоритм решения системы линейных уравнений методом Гаусса.
Получение математической модели одномерного объекта
Получение математической модели одномерного объекта
Для определения математической модели некоторого объекта нужно провести эксперимент и получить табличную зависимость значений выходного параметра процесса y от значений входного параметра x. Затем для выбранного вида математической модели, которую в общем виде можно записать y = f(x, a0, a1, a2, …, am), определяются значения параметров a0, a1, …, am, которые обеспечивают соответствие этой модели экспериментальным данным.
В соответствии с методом наименьших квадратов параметры a0, a1, …,am выбираются так, чтобы была минимальной сумма квадратов:
![]()
Чтобы найти нужные параметры, следует взять частные производные от правой части по a0, a1, …, am и приравнять их к нулю. Полученную систему уравнений можно решить одним из известных методов.
Например, для полинома второй степени y = a0 + a1x + a2x2 искомые значения a0, a1, a2 определяются решением системы линейных уравнений:
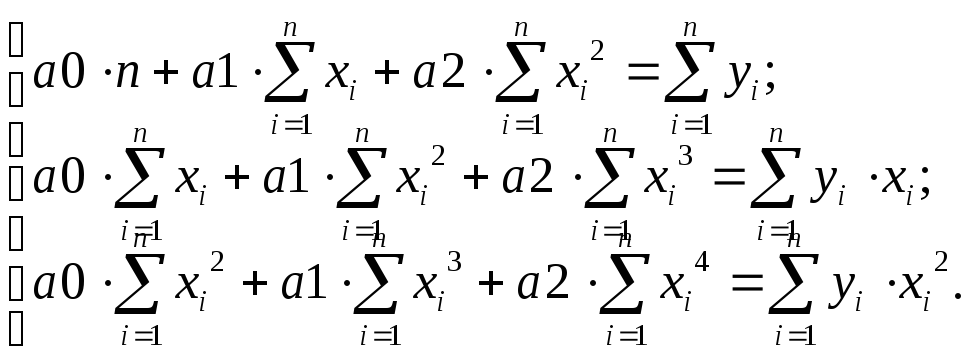
Рассмотрим алгоритм метода наименьших квадратов для вычисления коэффициентов полинома второй степени:
1. Ввод количества опытов n, значений x1, x2, …, xn, y1, y2, …, yn.
2. Определение коэффициентов системы линейных уравнений:
a1,2
=
![]() a1,3
=
a1,3
=
![]() a2,3
=
a2,3
=
![]() a3,3
=
a3,3
=
![]() b1
=
b1
=
![]() b2
=
b2
=
![]() b3
=
b3
=
![]()
a1,1 = n, a2,1 = a1,2, a2,2 = a1,3, a3,1 = a1,3, a3,2 = a2,3.
3. Решение системы AZ = B, где A – матрица коэффициентов; Z – вектор, в котором определяются корни z1 = a0, z2 = a1, z3 = a2; B – вектор свободных членов системы.
4. Вывод искомых коэффициентов a0, a1, a2.
5. Определение и вывод разностей (так называемых невязок) 1, 2, …, n.
Рассмотрим пример, в котором определяется система уравнений для вычисления параметров a, b, c математической модели y = acos(x) + bln(x) + c.
![]()
Частные производные:
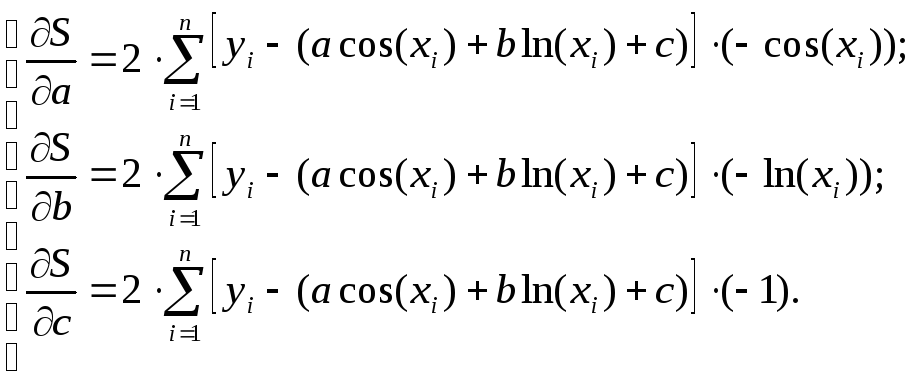
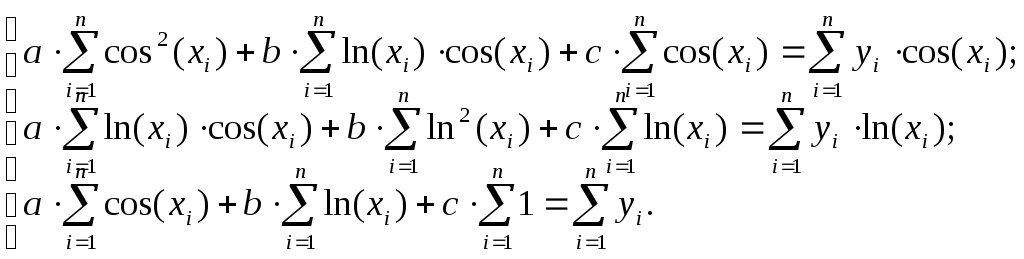
Таким образом, система линейных уравнений для определения параметров модели y = acos(x) + bln(x) + c принимает вид:
Получение математических моделей одномерных объектов в приложении Excel. В приложении Excel имеется возможность получения математических моделей через построение графиков функций. Пусть имеются значения x1, x2, …, xn и соответствующие им значения y1, y2, …, yn. Надо для этих данных построить точечный график и выполнить Работа с диаграммами / Макеты диаграмм / Добавить элемент диаграммы / Линия тренда / Дополнительные параметры линии тренда.
В появившемся окне на вкладке определить вид математической модели и отметить флажок Показывать уравнение на диаграмме. После нажатия ОK искомое уравнение появится на графике.
Получение математических моделей одномерных объектов в приложении Mathcad. В приложении Mathcad можно записать формулы приведенного выше алгоритма и вычислить коэффициенты функциональной зависимости. Существуют также и встроенные функции для определения математических моделей.
Например, пусть имеются значения х и у, полученные в результате проведения опытов. Надо найти математическую модель в виде полинома второй степени: y = a0 + a1 x + a2 x2
Можно использовать для решения задачи встроенную функцию linfit. На листе Mathcad тогда нужно записать:
А:= linfit(Х,Y,F)
Вычисленные значения a0, a1, a2 будут записаны в векторе А, который появится после ввода: A =
Для построения графика теперь можно определить значения:
i:= 0..5 t:= 0, 0.01..1 Z(t):= F(t)*A
Здесь Z(t) − искомая математическая модель.
Если построить на одном графике зависимость Z(t) от t и зависимость Yi от Xi, то можно сравнить, насколько хорошо полученный полином описывает данные опытов.
Назад
Решение задач оптимизации
Способы использования компьютера для решения задач оптимизации рассмотрим на примере.
Пусть имеется объект с двумя входными параметрами x1, x2 и выходным параметром y. Требуется определить оптимальные значения x1 и x2, которые обеспечивают минимум целевой функции y = f(x1, x2) и удовлетворяют ограничениям:
a1 <= x1<= b1, a2 <= x2<= b2, g(x1, x2) > 0.
Метод сканирования заключается в нахождении значений x1 из интервала [a1, b1] с шагом h1 и значений x2 из интервала [a2, b2] с шагом h2. Для всех значений x1 и x2, удовлетворяющих ограничениям g(x1, x2)>0, нужно вычислить значения целевой функции y = f(x1, x2). Те x1 и x2, для которых значение целевой функции минимально, являются решением задачи.
|
Алгоритм метода сканирования |
Программа метода сканирования |
|
1. Ввод a1, b1, h1, a2, b2, h2 и некоторого числа A. 2. Вычисление yopt = A, x1opt = a1, x2opt = a2. 3. x1 = a1. 4. x2 = a2. 5. Если g(x1, x2) > 0, то переход к 6, иначе – переход к 8. 6. Вычисление целевой функции y = f(x1, x2). 7. Если y<yopt, то yopt = y, x1opt = x1, x2opt = x2, иначе – переход к следующему пункту. 8. Вычисление x2 = x2 + h2. 9. Если x2 <= b2, то переход к 5, иначе – переход к 10. 10. Вычисление x1 = x1 + h1. 11. Если x1 <= b1, то переход к 4, иначе – переход к 12. 12. Вывод x1opt, x2opt и yopt. |
SubCommandButton1_Click() A1 = Cells(1,1) : B1 = Cells(2,1) : H1 = Cells(3,1) A2 = Cells(1,2) : B1 = Cells(2,2) : H2 = Cells(3,2) A = Cells(4,1) Yopt = A : X1opt = A1 : X2opt = A2 For X1 = A1 To B1 Step H1 For X1 = A2 To B2 Step H2 If G(X1, X2) > 0 Then Y = F(X1, X2) If Y<Yopt Then Yopt = Y: X1opt = X1 : X2opt = X2 End If Cells(6,1) = X1opt : Cells(6,2) = X2opt : Cells(6,3) = Yopt End Sub |
Здесь А – число, заведомо большее, чем значения целевой функции при определении минимума, и заведомо меньшее, чем значения целевой функции при определении максимума. Необходимо также написать две функции пользователя, в которых вычисляются целевая функция и ограничение.
-
Функция пользователя для вычисления целевой функции
Функция пользователя для вычисления ограничения (если оно присутствует)
Function F(X1, X2)
F =
End Function
Function G(X1, X2)
G =
End Function
Метод случайного поиска рассмотрим на том же примере. Идея метода основана на многократном (N раз) вычислении целевой функции y для значений x1 и x2, выбранных из отрезков [a1, b1] и [a2, b2] случайным образом. Те значения x1 и x2, при которых целевая функция минимальна и удовлетворяются ограничения, являются решением задачи.
Для определения некоторого случайного числа x на отрезке [a, b] можно использовать встроенную функцию Rnd. Тогда x = (b – a)Rnd(1) + a.
Алгоритм метода случайного поиска
1. Ввод исходных данных: a1, b1, a2, b2, количества опытов N и числа A, заведомо большего, чем значение целевой функции.
2. Вычисление yopt = A, x1opt = a1, x2opt = a2.
3. i = 1.
4. Вычисление x1 = (b1 – a1) Rnd(1) + a1, x2 = (b2 – a2) Rnd(1) + a2.
5. Проверка ограничения: если g(x1, x2) <= 0 , то переход к пункту 8, иначе – переход к следующему пункту.
6. Вычисление целевой функции y = f(x1, x2).
7. Если y < yopt, то yopt = y, x1opt = x1, x2opt = x2, иначе – переход к следующему пункту.
8. i = i + 1.
9. Если i <= N, то переход к пункту 4, иначе – переход к пункту 10.
10. Вывод оптимальных значений x1opt, x2opt и минимального значения целевой функции yopt.
Решение задач оптимизации в приложении Excel. В приложении Excel имеется специальная команда, с помощью которой можно решать задачи оптимизации. Например, чтобы решить предыдущий пример, следует произвести следующие действия