Файл: Г.М. Гринфельд ТЕОРИЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ уч. пособие.doc
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 29.07.2024
Просмотров: 643
Скачиваний: 3
СОДЕРЖАНИЕ
1. ОсновНые понятия и определения теории автоматического управления
1.1. Краткие сведения по истории развития систем автоматического управления
1.2. Обобщенная структурная схема сау
2. Математическое описание линейных сау
2.1. Составление и линеаризация дифференциальных уравнений сау
Основные свойства (теоремы) преобразования Лапласа
Изображения по Лапласу типовых сигналов
2.3. Временные и частотные характеристики звеньев и систем
2.4. Элементарные звенья систем автоматического управления
Пропорциональное (усилительное, безинерционное, масштабирующее) звено
Идеальное дифференцирующее звено
Апериодическое звено первого порядка
Реальное дифференцирующее звено
Инерционное звено второго порядка
Интегро-дифференцирующее звено
Пропорционально-интегральный регулятор (пи-регулятор)
2.5. Неминимально-фазовые звенья
2.6. Эквивалентные преобразования структурных схем линейных сау
2.7. Передаточные функции многоконтурных систем
3. Анализ устойчивости линейныхсау
3.1.Понятие устойчивости линейных систем
3.2.Алгебраический критерий устойчивости Гурвица
3.3.Частотные критерии устойчивости Михайлова и Найквиста
3.5.Оценка устойчивости по логарифмическим амплитудно- и фазо-частотным характеристикам
3.6.Устойчивость систем с запаздыванием
4. Качество динамических характеристик сау
4.1. Показатели качества процесса регулирования
4.2. Частотные критерии качества
4.3. Корневые критерии качества
4.4. Интегральные критерии качества
5.1. Стационарные режимы сау. Передаточные функции статических и астатических систем
5.2. Коэффициенты ошибки системы
5.3. Системы комбинированного управления
6. Анализ сау в пространстве состояния
6.1. Основные положения метода переменных состояния
6.2. Способы построения схем переменных состояния
Метод прямого программирования
Метод параллельного программирования
Метод последовательного программирования
6.3. Решение уравнений состояния линейных стационарных сау. Вычисление фундаментальной матрицы
Последовательные корректирующие звенья
Параллельные корректирующие звенья
7.2. Частотный метод синтеза корректирующих устройств
Построение лах в низкочастотном диапазоне
Построение лах в среднечастотном диапазоне
Зависимость колебательности от значений hи h1
Построение лах в высокочастотном диапазоне
7.3. Последовательные корректирующие устройства
7.4. Параллельные корректирующие устройства
7.5. Техническая реализация корректирующих звеньев
Пассивные четырехполюсники постоянного тока
Пассивные корректирующие четырехполюсники
Активные корректирующие звенья
Активные четырехполюсники постоянного тока
8. Нелинейные системы автоматического управления
8.1. Особенности нелинейных систем и методы их анализа
8.2. Исследование нелинейных систем на фазовой плоскости
8.3. Метод гармонической линеаризации нелинейных звеньев
Коэффициенты гармонической линеаризации типовых нелинейностей
8.5. Методы определения параметров автоколебаний
Задание для расчета линейной caу
Варианты задания для расчета линейной сау
Варианты передаточных функций линейной сау
Задание для расчета нелинейной сау
Варианты задания для расчета нелинейной сау
Варианты структурных схем нелинейных систем Варианты статических характеристик нелинейного элемента
4.2. Частотные критерии качества
Оценка динамических свойств САУ по ее переходной функции h(t) представляет собой прямой метод исследования качества регулирования. Существует возможность судить об основных показателях качества переходных процессов в системе и без построения h(t), используя различные косвенные оценки, которые определяются проще, чем переходная функция. Такие косвенные оценки называются критериями качества. При исследовании качества переходных процессов эти критерии являются аналогами критериев устойчивости.
Рассмотрим частотные критерии качества, позволяющие судить о динамических свойствах системы по ее частотным характеристикам. К их числу могут быть отнесены (см. разд. 3.4) запасы устойчивости САУ по усилению и фазе, которые могут быть определены по АФХ или логарифмическим амплитудно- и фазо-частотной характеристикам системы в разомкнутом состоянии.
Для
оценки качества переходного процесса
минимально-фазовой системы достаточно
знать вид ее амплитудно-частотной
характеристики
![]() .
С целью обеспечения сопоставимости
значений критериев для различных САУ
характеристика
.
С целью обеспечения сопоставимости
значений критериев для различных САУ
характеристика![]() нормируется,
для чего ее ординаты делятся на начальное
значение
нормируется,
для чего ее ординаты делятся на начальное
значение![]() ,
т.е. на ее значение при
,
т.е. на ее значение при![]() :
:
![]()
![]()
![]() .
.
При
этом АЧХ нормированных статических
систем
![]() начинается с единицы (рис. 4.2).
начинается с единицы (рис. 4.2).
К
частотным показателем качества,
определяемым по![]() ,
относятся:
,
относятся:
полоса пропускания системы
 ;
;резонансная частота
 :
:показатель колебательности M.
Полоса
пропускания системы![]() -
это диапазон частот, в котором
-
это диапазон частот, в котором
![]() превышает единицу. Если АЧХ замкнутой
системы
превышает единицу. Если АЧХ замкнутой
системы![]() во
всем частотном диапазоне меньше единицы,
то полоса пропускания отсчитывается
на уровне 0,707.
во
всем частотном диапазоне меньше единицы,
то полоса пропускания отсчитывается
на уровне 0,707.
Резонансная
частота
![]() – это частота, при которой
– это частота, при которой![]() достигает максимума.
достигает максимума.
П оказатель
колебательности
M
равен
максимальному значению нормированной
АЧХ замкнутой системы, т.е.
оказатель
колебательности
M
равен
максимальному значению нормированной
АЧХ замкнутой системы, т.е.
![]() =
=
![]() .
.
При
![]() <
1 переходная функция системы монотонная
(не колебательная). Чем большеM,
тем больше колебательность.
При M
<
1 переходная функция системы монотонная
(не колебательная). Чем большеM,
тем больше колебательность.
При M![]() в системе возникают незатухающие
колебания с частотой
в системе возникают незатухающие
колебания с частотой
![]() .
Качество регулирования САУ считается
вполне удовлетворительным, если
показатель колебательности
системы
находится в диапазоне 1,1 < М
< 1,5 , при
этом
переходная функция имеет приемлемую
колебательность с частотой близкой к
.
Качество регулирования САУ считается
вполне удовлетворительным, если
показатель колебательности
системы
находится в диапазоне 1,1 < М
< 1,5 , при
этом
переходная функция имеет приемлемую
колебательность с частотой близкой к
![]() .
.
Длительность
переходного процесса определяется
шириной характеристики
![]() ,
а, следовательно, величиной полосы
пропускания
,
а, следовательно, величиной полосы
пропускания
![]() .
Чем больше
.
Чем больше
![]() ,
т.е. чем более растянута частотная
характеристика, тем короче переходный
процесс и меньше tp.
Это связано
с тем, что, чем более высокие частоты
«пропускает» система, тем она менее
инерционна. Этим же объясняется и то,
что длительность переходного процесса
тем меньше, чем больше частота среза
,
т.е. чем более растянута частотная
характеристика, тем короче переходный
процесс и меньше tp.
Это связано
с тем, что, чем более высокие частоты
«пропускает» система, тем она менее
инерционна. Этим же объясняется и то,
что длительность переходного процесса
тем меньше, чем больше частота среза
![]() .
.
Величина перерегулирования может быть приближенно оценена по виду вещественной частотной характеристики замкнутой системы:
![]() .
.
Если
график
![]() имеет
максимум («горб»), переходный процесс
в системе происходит с перерегулированием,
величина которого составляет не менее
18 %. В случае монотонно убывающей
характеристики
имеет
максимум («горб»), переходный процесс
в системе происходит с перерегулированием,
величина которого составляет не менее
18 %. В случае монотонно убывающей
характеристики![]() переходная
функция также будет монотонной (без
перерегулирования).
переходная
функция также будет монотонной (без
перерегулирования).
Колебательность
и длительность переходного процесса
h(t
) замкнутой
системы могут быть в первом приближении
определены по параметрам ЛАХ разомкнутой
системы: частоте среза и величинам
запасов устойчивости по фазе и амплитуде.
В случае колебательной переходной
функции h(t)
резонансная
частота ωр
замкнутой
системы близка по величине к частоте
среза
![]() ЛАХ
разомкнутой системы. Колебательность
считается допустимой, если ЛАХ на частоте
среза имеет наклон -20 дБ/дек; чем шире
участок с таким наклоном, тем меньше
колебательность. Если запас по фазе Δφ
> 300
, а запас по амплитуде не менее 6 дБ, то
h(t) имеет
слабую колебательность.
ЛАХ
разомкнутой системы. Колебательность
считается допустимой, если ЛАХ на частоте
среза имеет наклон -20 дБ/дек; чем шире
участок с таким наклоном, тем меньше
колебательность. Если запас по фазе Δφ
> 300
, а запас по амплитуде не менее 6 дБ, то
h(t) имеет
слабую колебательность.
4.3. Корневые критерии качества
Эта группа критериев позволяет оценить качество переходных процессов по расположении полюсов и нулей передаточной функции устойчивой замкнутой системы. При исследовании устойчивости САУ оценивалось только расположение полюсов на комплексной плоскости. Оценивая качество переходного процесса, необходимо учитывать и расположение нулей.
К числу корневых критериев качества относят степень устойчивости и степень колебательности.
Степень устойчивости (η) – это расстояние от мнимой оси до ближайшего к ней левого полюса (рис. 4.3, а) или ближайшей пары комплексно сопряженных полюсов замкнутой системы (рис. 4.3, б). В первом случае соответствующая этому полюсу слагаемое в общем решении дифференциального уравнения (3.5) равно:
![]() .
.
В о
втором случае, когда ближайшей к мнимой
оси окажется пара комплексно-сопряженных
полюсов, им в выражении (3.5) будет
соответствовать слагаемое вида:
о
втором случае, когда ближайшей к мнимой
оси окажется пара комплексно-сопряженных
полюсов, им в выражении (3.5) будет
соответствовать слагаемое вида:
![]() .
.
В обоих случаях указанное слагаемое будет затухать медленнее остальных, тем самым определяя в первом приближении длительность переходного процесса:
![]() .
.
Степень колебательности определяется только для замкнутых систем, передаточные функции имеют комплексно-сопряженные полюса:
pi,i+1 = αi + jβi .
Переходная функция таких систем в большей или меньшей степени колебательна. Степень колебательности переходного процесса равна:
![]() ,
,
где φ – наибольший по величине угол, образованный отрицательной вещественной полуосью и лучом, проведенным из начала координат к комплексному полюсу pi (рис. 4.3, а, б). Среди всех комплексно-сопряженных полюсов системы указанному полюсу соответствует максимальное отношение мнимой части к действительной. Чем больше степень колебательности μ, тем слабее будет затухание колебаний в переходном процессе.
Задавшись предельно допустимыми значениями степени устойчивости ηз и степени колебательности φз, можно построить на комплексной плоскости область (рис. 4.3, в), в которой должны находиться полюса системы, показатели качества регулирования которой будут удовлетворять заданным значениям, т.е. η > ηз и μ < μз.
4.4. Интегральные критерии качества
Интегральными критериями (оценками) качестваназываются такие, которые одним числом (интегрально) оценивают качество переходного процесса в системе. Кроме того, такие оценки обычно являются интегральными функционалами и выражаются в следующем виде:
![]()
где
F![]() – заданная функция, определяющая тип
интегрального критерия;x(t)
– отклонение переходной функции
системы от значенияh(∞),
которое установится после окончания
переходного процесса, т.е.
– заданная функция, определяющая тип
интегрального критерия;x(t)
– отклонение переходной функции
системы от значенияh(∞),
которое установится после окончания
переходного процесса, т.е.
x(t) = h(∞) – h(t). (4.2)
К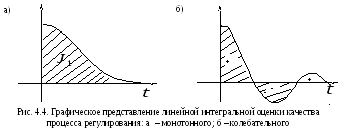 ак
известно, качество переходного процесса
в САУ оценивается совокупностью
показателей. Зачастую при изменении
параметров системы с целью обеспечения
требуемых характеристик переходного
процесса одни из показателей улучшаются,
в то время как другие ухудшаются. В
такой ситуации, когда задача выбора
оптимальных значений параметров системы
оказывается многокритериальной, а
потому трудноразрешимой, использование
интегральных критериев, оценивающих
качество регулирования одним числом,
оказывается предпочтительным.
ак
известно, качество переходного процесса
в САУ оценивается совокупностью
показателей. Зачастую при изменении
параметров системы с целью обеспечения
требуемых характеристик переходного
процесса одни из показателей улучшаются,
в то время как другие ухудшаются. В
такой ситуации, когда задача выбора
оптимальных значений параметров системы
оказывается многокритериальной, а
потому трудноразрешимой, использование
интегральных критериев, оценивающих
качество регулирования одним числом,
оказывается предпочтительным.
Для монотонного процесса (рис. 4.4, а) интегральной оценкой может служить функционал следующего вида:
![]()
называемый линейной интегральной оценкой качества J1. Ее численное значение равно площади под кривой переходного процесса. Очевидно, что динамика системы тем лучше, чем меньше значение J1.
Для обеспечения требуемых динамических свойств САУ необходимо выразить величину J1 через коэффициенты передаточной функции системы, а затем найти оптимальные значения варьируемых параметров, соответствующих минимуму J1.