Файл: Г.М. Гринфельд ТЕОРИЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ уч. пособие.doc
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 29.07.2024
Просмотров: 632
Скачиваний: 3
СОДЕРЖАНИЕ
1. ОсновНые понятия и определения теории автоматического управления
1.1. Краткие сведения по истории развития систем автоматического управления
1.2. Обобщенная структурная схема сау
2. Математическое описание линейных сау
2.1. Составление и линеаризация дифференциальных уравнений сау
Основные свойства (теоремы) преобразования Лапласа
Изображения по Лапласу типовых сигналов
2.3. Временные и частотные характеристики звеньев и систем
2.4. Элементарные звенья систем автоматического управления
Пропорциональное (усилительное, безинерционное, масштабирующее) звено
Идеальное дифференцирующее звено
Апериодическое звено первого порядка
Реальное дифференцирующее звено
Инерционное звено второго порядка
Интегро-дифференцирующее звено
Пропорционально-интегральный регулятор (пи-регулятор)
2.5. Неминимально-фазовые звенья
2.6. Эквивалентные преобразования структурных схем линейных сау
2.7. Передаточные функции многоконтурных систем
3. Анализ устойчивости линейныхсау
3.1.Понятие устойчивости линейных систем
3.2.Алгебраический критерий устойчивости Гурвица
3.3.Частотные критерии устойчивости Михайлова и Найквиста
3.5.Оценка устойчивости по логарифмическим амплитудно- и фазо-частотным характеристикам
3.6.Устойчивость систем с запаздыванием
4. Качество динамических характеристик сау
4.1. Показатели качества процесса регулирования
4.2. Частотные критерии качества
4.3. Корневые критерии качества
4.4. Интегральные критерии качества
5.1. Стационарные режимы сау. Передаточные функции статических и астатических систем
5.2. Коэффициенты ошибки системы
5.3. Системы комбинированного управления
6. Анализ сау в пространстве состояния
6.1. Основные положения метода переменных состояния
6.2. Способы построения схем переменных состояния
Метод прямого программирования
Метод параллельного программирования
Метод последовательного программирования
6.3. Решение уравнений состояния линейных стационарных сау. Вычисление фундаментальной матрицы
Последовательные корректирующие звенья
Параллельные корректирующие звенья
7.2. Частотный метод синтеза корректирующих устройств
Построение лах в низкочастотном диапазоне
Построение лах в среднечастотном диапазоне
Зависимость колебательности от значений hи h1
Построение лах в высокочастотном диапазоне
7.3. Последовательные корректирующие устройства
7.4. Параллельные корректирующие устройства
7.5. Техническая реализация корректирующих звеньев
Пассивные четырехполюсники постоянного тока
Пассивные корректирующие четырехполюсники
Активные корректирующие звенья
Активные четырехполюсники постоянного тока
8. Нелинейные системы автоматического управления
8.1. Особенности нелинейных систем и методы их анализа
8.2. Исследование нелинейных систем на фазовой плоскости
8.3. Метод гармонической линеаризации нелинейных звеньев
Коэффициенты гармонической линеаризации типовых нелинейностей
8.5. Методы определения параметров автоколебаний
Задание для расчета линейной caу
Варианты задания для расчета линейной сау
Варианты передаточных функций линейной сау
Задание для расчета нелинейной сау
Варианты задания для расчета нелинейной сау
Варианты структурных схем нелинейных систем Варианты статических характеристик нелинейного элемента
Основной недостаток пассивных четырехполюсников заключается в том, что они ослабляют сигнал. Кроме того, при конечном значении полного сопротивления нагрузки фактическая передаточная функция корректирующего звена отклоняется от расчетной, определяемой по выражению (7.17).
Наиболее характерные схемы пассивных четырехполюсников постоянного тока показаны в табл. 7.3. Там же приведены их передаточные функции.
Иногда оказывается целесообразным соединить два пассивных четырехполюсника последовательно (рис. 7.11, а). Передаточная функция такого соединения равна:
![]()
т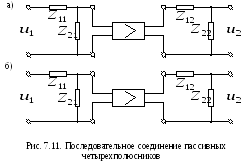 олько
при условии, что сумма полного сопротивления
олько
при условии, что сумма полного сопротивления![]() второго четырехполюсника значительно,
по крайней мере, на порядок больше
полного сопротивления
второго четырехполюсника значительно,
по крайней мере, на порядок больше
полного сопротивления![]() первого четырехполюсника.
первого четырехполюсника.
Чаще
пассивные четырехполюсники соединяют
последовательно через разделительный
усилитель (рис. 7.11, б). Если входное
сопротивление усилителя не влияет на
передаточную функцию
![]() первого четырехполюсника, то передаточная
функция соединения равна:
первого четырехполюсника, то передаточная
функция соединения равна:
![]()
где
![]() – передаточный коэффициент усилителя.
– передаточный коэффициент усилителя.
Таблица 7.3
Пассивные корректирующие четырехполюсники
|
Тип звена |
Электрическая схема |
Передаточная функция |
Параметры |
|
Р |
|
|
|
|
Интегро-дифференцирующее звено (с дифференцирующими свойствами) |
|
|
|
|
Апериодическое звено первого порядка |
|
|
|
|
Интегро-дифференцирующее звено (с интегрирующими свойствами) |
|
|
|
|
Комбинированное интегро-дифференцирующее звено |
|
|
|
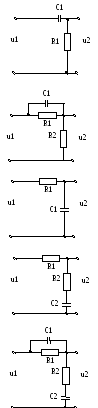 еальное
дифференцирующее звено
еальное
дифференцирующее звено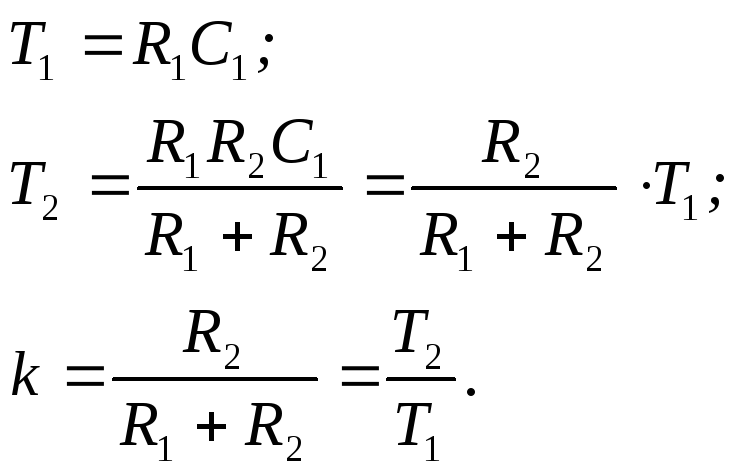
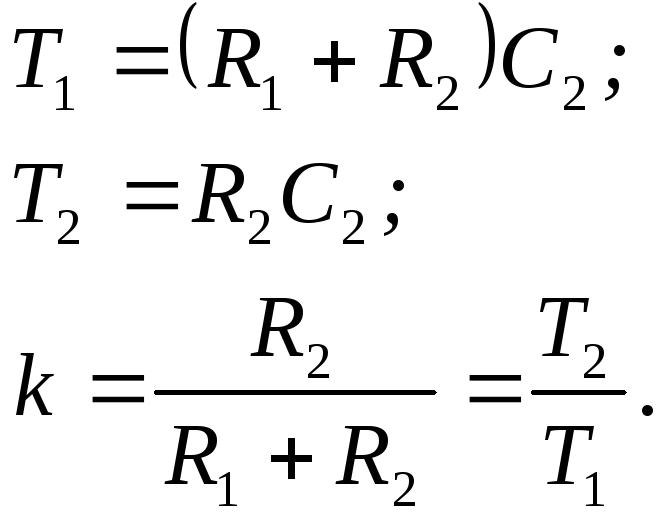
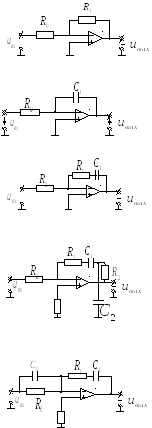
Таблица 7.4
Активные корректирующие звенья
|
Тип звена |
Электрическая схема |
Передаточные функции |
Параметры |
|
Пропорцио- нальное |
|
|
|
|
Интегрирующее |
|
|
|
|
ПИ-регулятор |
|
|
|
|
Пропорционально-интегро-дифференцирующее |
|
|
|
|
|
|
|
Кроме того, разделительный усилитель компенсирует понижение уровня сигнала, вызываемое пассивными четырехполюсниками.
Активные четырехполюсники постоянного тока
В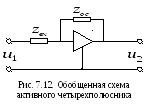 активных четырехполюсниках (рис. 7.12)
используются операционные усилители
с весьма большим передаточным коэффициентом
(
активных четырехполюсниках (рис. 7.12)
используются операционные усилители
с весьма большим передаточным коэффициентом
(![]() и более), поэтому передаточная функция
четырехполюсника с достаточной точностью
равна:
и более), поэтому передаточная функция
четырехполюсника с достаточной точностью
равна:
![]() .
.
Знак
«минус» указывает на то, что напряжение
![]() противоположно по знаку напряжению
противоположно по знаку напряжению![]() (фаза сигнала изменяется на 1800).
(фаза сигнала изменяется на 1800).
Активные четырехполюсники в ограниченной полосе частот осуществляют почти идеальное дифференцирование или интегрирование сигнала. Передаточный коэффициент может быть значительным. Легко осуществить суммирование нескольких сигналов на входе. Все это весьма существенные достоинства активных четырехполюсников. Однако они значительно сложнее и дороже пассивных четырехполюсников.
В табл. 7.4 приведены простейшие схемы активных четырехполюсников и их передаточные функции.
Изменяя
операторы сопротивлений
![]() и
и![]() и параметры их элементов, можно получить
активные четырехполюсники с более
сложными передаточными функциями.
и параметры их элементов, можно получить
активные четырехполюсники с более
сложными передаточными функциями.
Вопросы для самопроверки
Укажите основные способы включения корректирующих звеньев в САУ.
Сформулируйте принципы частотного метода синтеза корректирующих устройств.
Назовите требования к качеству регулирования системы, определяющие вид низкочастотного участка желаемой ЛАХ.
Какими параметрами определяется запретная область для низкочастотного участка ЛАХ следящей системы?
Как строится среднечастотный участок желаемой ЛАХ, если указаны требования к величине перерегулирования и времени регулирования?
Какой показатель качества регулирования следящей системы определяет вид запретной области для желаемой фазо-частотной характеристики?
Укажите, в чем заключаются преимущества и недостатки последовательных корректирующих звеньев с дифференцирующими и интегрирующими свойствами.
В чем заключается основное достоинство параллельной коррекции?
Назовите недостатки использования пассивных четырехполюсников в качестве корректирующих звеньев.
В чем заключается основное достоинство активных четырехполюсников, используемых в качестве корректирующих звеньев?