ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 22.11.2023
Просмотров: 390
Скачиваний: 2
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
подъема груза и изменения стрелы производят отдельной лебедкой
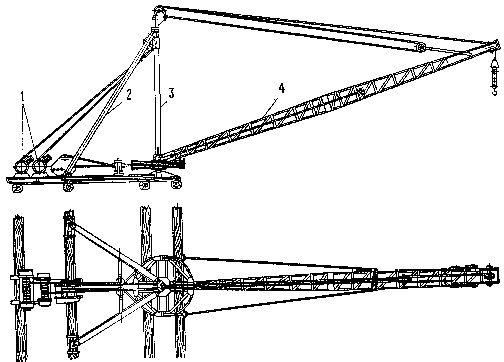
Рис. 33. Вантовый кран
К специальным кранам можно отнести плавучие, кабельные, контейнерные и другие краны.
Плавучие краны. В портах для строительных и ремонтных работ, а так же при устранении последствий аварии используют плавучие краны. Эти краны (рис. 34) устанавливают на самоходных и буксируемых понтонах. Самоходные понто- ны оснащают комплектом оборудования, необходимого для навигации. Энерго- снабжение крана осуществляется от силовых установок, размещенных на пон- тоне. Приводы механизмов крана электрические, обычно постоянного тока по си- стеме генератор – двигатель.
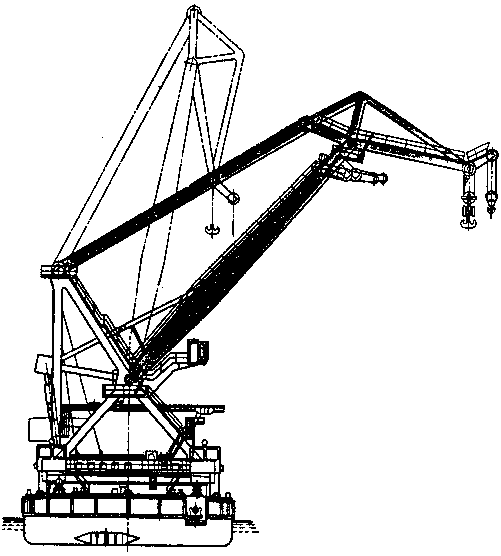
Рис. 34. Плавучий кран
Кабельные краны. Основное назначение кабельных кранов – обслужива- ние больших производственных площадей, строительства мостов и гидротехниче- ских сооружений. Кабельный кран (рис. 34) состоит из двух опорных башен 1 и 7 с натянутым между ними несущим канатом 3, выполняющим функцию пролетно- го строения мостового перегружателя (см. рис. 23). По несущему канату с помо- щью тягового каната 5 передвигается грузовая тележка 2 с грузозахватным устройством. Тяговый канат огибает блоки, расположенные на обеих башнях, и барабан тяговой лебедки 8 и образует замкнутое кольцо с прикрепленной к нему тележкой 2. Для подъема и опускания груза в любой точке пролета крана имеется подъемный канат 6, прикрепленный одним концом к тележке или к противопо- ложной опорной башне, а другим – к барабану подъемной лебедки 9. В качестве несущего каната используют специальный спиральный канат одинарной свивки закрытой конструкции, имеющий гладкую поверхность. Для уменьшения прови- сания подъемного и тягового канатов служат поддержки 4. При движении подъ- емного и тягового канатов с одинаковой скоростью грузовая тележка перемеща- ется по несущему
канату. Подъем или опускание груза происходит только при ра- боте подъемной лебедки.
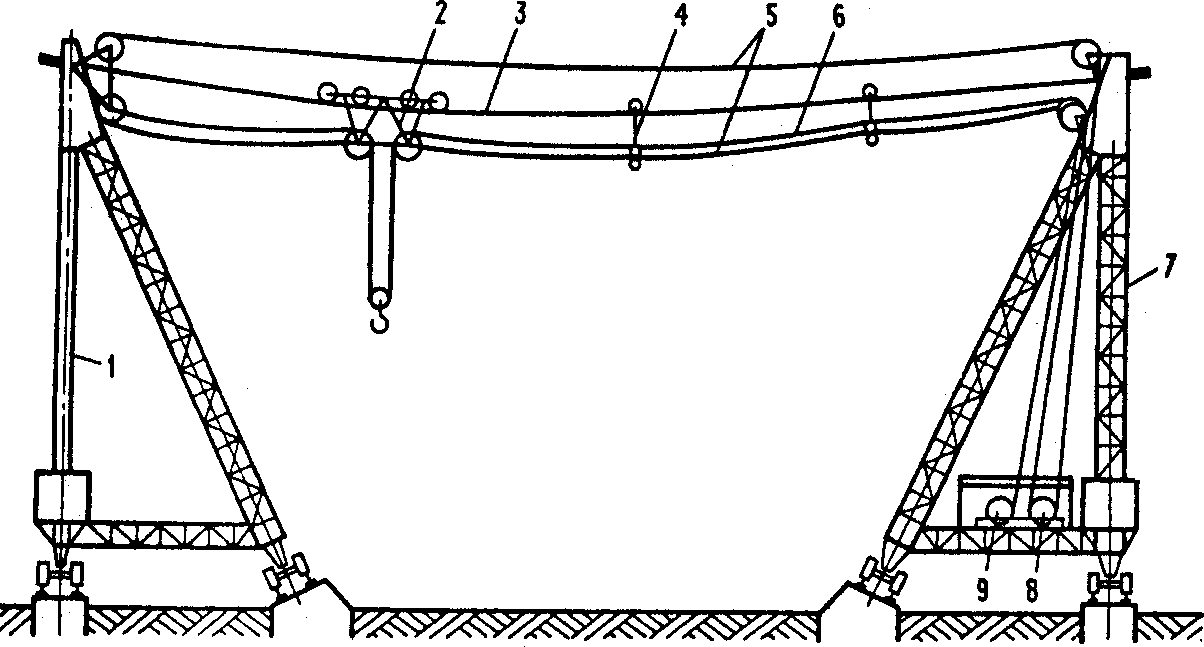
Рис. 35. Схема кабельного крана
Опорные башни кабельного крана могут быть неподвижными и подвиж- ными. Подвижные опорные башни могут быть выполнены перемещающимися по параллельным подкрановым путям, или одна из них может быть неподвижной, а другая перемещаемой по рельсовому пути, представляющему собой часть окруж- ности. В этом случае кабельный кран называют радиальным, он обслуживает площадь сектора круга. Пролет кабельных кранов обычно 150…600 м, но иногда превышает 1000 м; грузоподъемность 1…25 т, но может быть 50…150 т. Скорость подъема груза в зависимости от высоты подъема 1,5…3 м/с, а скорость передви- жения грузовой тележки 8…10 м/с. Передвижение башен является установочным движением и производится со скоростью 6 …20 м/мин. Высота башни на складах составляет 20…30 м. В качестве грузозахватных устройств в кабельных кранах используют крюковую подвеску, грейфер или бадьи с раскладывающимся или опрокидным дном.
Контейнерные краны. Эти грузоподъемные краны находят широкое при- менение для перегрузки стандартных контейнеров в морских и речных портах и на крупных железнодорожных узлах. Они оборудованы специальным устрой- ством – захватом для контейнеров, называемым спредером. Контейнерные краны чаще всего выполняют в виде козловых кранов на рельсовом ходу. Для работ на причалах эти краны снабжают откидной консолью, дающей возможность беспре- пятственного перемещения судов.
В последнее время для производства работ и доставки грузов все шире находят применение аэростаты, дирижабли и краны – вертолеты (рис. 36). В труднодоступных местах эксплуатация крана – вертолета экономически выгодна. Так применение его при прокладке одной из высоковольтных линий электропере- дачи сэкономило 35% средств, запланированных для этих целей на эксплуатацию автомобилей, грузоподъемных и других машин.
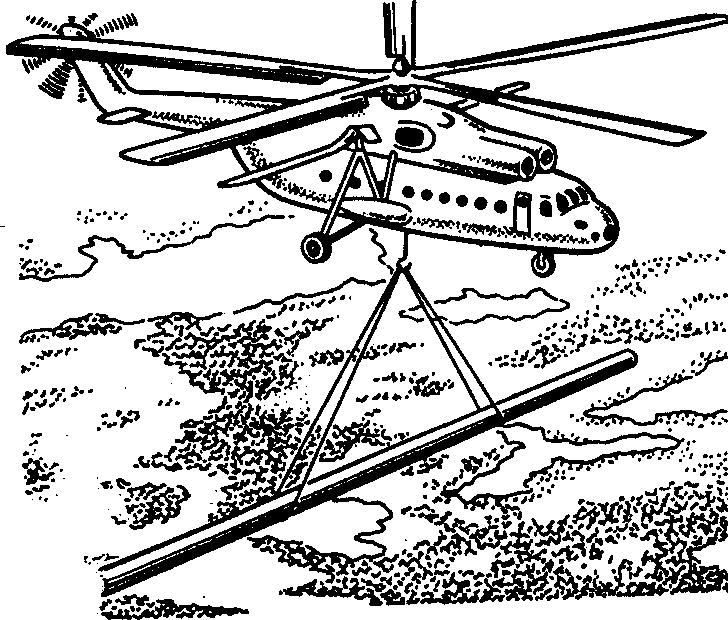
Рис. 36. Кран-вертолет
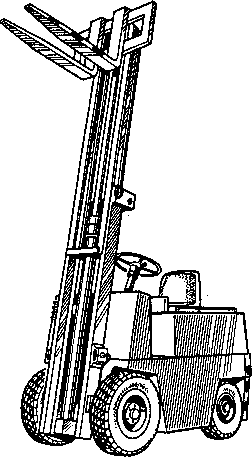
Для внутрицехового и межцехового транспорта. А так же для погрузочно- разгрузочных работ на складах, железных дорогах и портах широко применяют погрузчики (рис 37). Они выполняют операции захватывания, вертикального и горизонтального перемещения груза и укладки его в штабель или на транспорт- ные средства. Отечественная промышленность выпускает погрузчики с приводом от двигателя внутреннего сгорания или с электроприводом, питающимся от акку- муляторной батареи. При работе в закрытых помещениях и цехах применяют ак- кумуляторные погрузчики. Отечественные аккумуляторные погрузчики выпуска- ют грузоподъемностью не более 5 т, погрузчики с двигателем внутреннего сгора- ния – грузоподъемностью 3,2 т и более.
Рис. 37. Электропогрузчик на пневмоколесном ходу с вилочным захватом
В зависимости от назначения погрузчики выполняют в виде самоходных тележек, имеющих подвижную платформу с подъемным грузозахватным устрой- ством, или в виде тягачей для буксирования прицепных тележек. В зависимости от характера выполняемой работы и вида груза погрузчики оборудуют различны- ми специальными приспособлениями для захватывания штучных грузов и уклад- ки их в штабеля или на стеллажи.
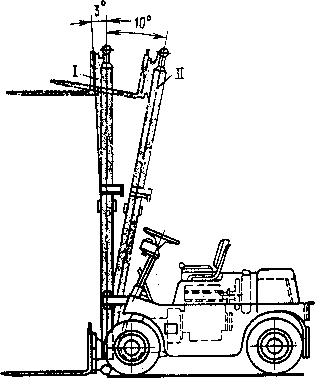 Универсальность погрузчика и возможность его использования определя- ется числом и конструкцией сменных грузозахватных приспособлений, основным из которых является вилочный захват. Конструкции сменных грузозахватных приспособлений аналогичны представленным на рис. 26 для крана штабелера. Для работы с некоторыми грузами (бочки, рулоны, ящики, и т.п.) на каретке гру- зоподъемного устройства устанавливают захват с челюстями плоской или полу- круглой формы, которые можно поворачивать на угол 90…360º. Это позволяет при укладке груза в штабель установить его в требуемом положении. Для удоб- ства захватывания, транспортирования и укладки грузов рама погрузчика может отклоняться от вертикального положения вперёд на угол 3…6º (рис.38) и назад на угол 10…15º. Наклон рамы вперёд, производимый при помощи гидроцилиндра, облегчает сталкивание груза с вилочного захвата при штабелировании, наклон назад увеличивает устойчивость погрузчика при перевозке груза.
Универсальность погрузчика и возможность его использования определя- ется числом и конструкцией сменных грузозахватных приспособлений, основным из которых является вилочный захват. Конструкции сменных грузозахватных приспособлений аналогичны представленным на рис. 26 для крана штабелера. Для работы с некоторыми грузами (бочки, рулоны, ящики, и т.п.) на каретке гру- зоподъемного устройства устанавливают захват с челюстями плоской или полу- круглой формы, которые можно поворачивать на угол 90…360º. Это позволяет при укладке груза в штабель установить его в требуемом положении. Для удоб- ства захватывания, транспортирования и укладки грузов рама погрузчика может отклоняться от вертикального положения вперёд на угол 3…6º (рис.38) и назад на угол 10…15º. Наклон рамы вперёд, производимый при помощи гидроцилиндра, облегчает сталкивание груза с вилочного захвата при штабелировании, наклон назад увеличивает устойчивость погрузчика при перевозке груза.
Рис. 38 Положение рамы погрузчика:
I – при захвате и штабелировании
грузов; II- при транспортировании
Отечественные погрузчики имеют гидравлический или механический привод грузоподъёмного устройства. Преимуществом гидравлического привода является плавность подъёма и опускания каретки, широкий диапазон регулирова- ния скорости и простота конструктивной схемы. Механический привод требует применения специального редуктора и весьма длинной грузовой цепи.
Грузоподъёмные машины характеризуются следующими основными по- казателями: грузоподъёмностью, скоростями движения отдельных механизмов, пролётов, режимами работы, вылетом, высотой подъёма грузозахватного органа. Значение этих показателей должны происходит повторно – кратковременных выключениях. Полное время цикла работы механизма склады- вается из времени пуска tn , времени движении с установившейся скоро-
стьюty , времени торможения tТ и времени пауз t0
t ц =tn +ty +t0 +tТ . Относительная продолжительность включения
П tв
100%
t
в
ц
где t в - время работы механизма в течении цикла.
Приняты номинальные значения ПВ 15, 25, 40, 60%.Интенсивность рабо- ты механизма определяется коэффициентами использования в течении суток кс и коэффициентом использования в течении года. Коэффициент использования кра- на по грузоподъёмности
Г ,
К Qср Q
где Qср - среднее значение массы поднимаемого груза за смену. Для кра- нов с тяжёлыми грузозахватными устройствами
к Qср QМ ,
Г Q Q
М
где Qм - масса грузах ватного устройства. Классы использования механиз- ма, характеризующие интенсивность механизма при эксплуатации, устанавлива- ют в зависимости от общего времени работы Т. Существует шесть классов Ао, А1,…, А6.Классы нагружения механизма, характеризующие относительную нагрузку механизма, в зависимости от значения коэффициента нагружения К при- ведены в табл.1.
Основными параметрами грузоподъёмных машин в соответствии со стан- дартом являются грузоподъёмность, скорость движения механизмов, пролёт, ре- жим работы, вылет, высота подъёма.
Грузоподъёмностью машины Q называют массу номинального рабочего груза на подъём которого рассчитана машина. Соотношение между массой Q и весом G равно G = Qg. При определении грузоподъёмности учитывают массу гру- зозахватных приспособлений и вспомогательных устройств. Значение грузоподъ- ёмности должно соответствовать ГОСТ 1575 – 81 для всех грузоподъёмных кра- нов от 0,01 (Т) до 1250 (Т).
-
Эти краны по сравнению с другими свободно стоящими поворотными кранами имеют меньшую массу и стоимость.
Рис. 33. Вантовый кран
Специальные краны
К специальным кранам можно отнести плавучие, кабельные, контейнерные и другие краны.
Плавучие краны. В портах для строительных и ремонтных работ, а так же при устранении последствий аварии используют плавучие краны. Эти краны (рис. 34) устанавливают на самоходных и буксируемых понтонах. Самоходные понто- ны оснащают комплектом оборудования, необходимого для навигации. Энерго- снабжение крана осуществляется от силовых установок, размещенных на пон- тоне. Приводы механизмов крана электрические, обычно постоянного тока по си- стеме генератор – двигатель.
Рис. 34. Плавучий кран
Кабельные краны. Основное назначение кабельных кранов – обслужива- ние больших производственных площадей, строительства мостов и гидротехниче- ских сооружений. Кабельный кран (рис. 34) состоит из двух опорных башен 1 и 7 с натянутым между ними несущим канатом 3, выполняющим функцию пролетно- го строения мостового перегружателя (см. рис. 23). По несущему канату с помо- щью тягового каната 5 передвигается грузовая тележка 2 с грузозахватным устройством. Тяговый канат огибает блоки, расположенные на обеих башнях, и барабан тяговой лебедки 8 и образует замкнутое кольцо с прикрепленной к нему тележкой 2. Для подъема и опускания груза в любой точке пролета крана имеется подъемный канат 6, прикрепленный одним концом к тележке или к противопо- ложной опорной башне, а другим – к барабану подъемной лебедки 9. В качестве несущего каната используют специальный спиральный канат одинарной свивки закрытой конструкции, имеющий гладкую поверхность. Для уменьшения прови- сания подъемного и тягового канатов служат поддержки 4. При движении подъ- емного и тягового канатов с одинаковой скоростью грузовая тележка перемеща- ется по несущему
канату. Подъем или опускание груза происходит только при ра- боте подъемной лебедки.
Рис. 35. Схема кабельного крана
Опорные башни кабельного крана могут быть неподвижными и подвиж- ными. Подвижные опорные башни могут быть выполнены перемещающимися по параллельным подкрановым путям, или одна из них может быть неподвижной, а другая перемещаемой по рельсовому пути, представляющему собой часть окруж- ности. В этом случае кабельный кран называют радиальным, он обслуживает площадь сектора круга. Пролет кабельных кранов обычно 150…600 м, но иногда превышает 1000 м; грузоподъемность 1…25 т, но может быть 50…150 т. Скорость подъема груза в зависимости от высоты подъема 1,5…3 м/с, а скорость передви- жения грузовой тележки 8…10 м/с. Передвижение башен является установочным движением и производится со скоростью 6 …20 м/мин. Высота башни на складах составляет 20…30 м. В качестве грузозахватных устройств в кабельных кранах используют крюковую подвеску, грейфер или бадьи с раскладывающимся или опрокидным дном.
Контейнерные краны. Эти грузоподъемные краны находят широкое при- менение для перегрузки стандартных контейнеров в морских и речных портах и на крупных железнодорожных узлах. Они оборудованы специальным устрой- ством – захватом для контейнеров, называемым спредером. Контейнерные краны чаще всего выполняют в виде козловых кранов на рельсовом ходу. Для работ на причалах эти краны снабжают откидной консолью, дающей возможность беспре- пятственного перемещения судов.
В последнее время для производства работ и доставки грузов все шире находят применение аэростаты, дирижабли и краны – вертолеты (рис. 36). В труднодоступных местах эксплуатация крана – вертолета экономически выгодна. Так применение его при прокладке одной из высоковольтных линий электропере- дачи сэкономило 35% средств, запланированных для этих целей на эксплуатацию автомобилей, грузоподъемных и других машин.
Рис. 36. Кран-вертолет
Погрузчики
Для внутрицехового и межцехового транспорта. А так же для погрузочно- разгрузочных работ на складах, железных дорогах и портах широко применяют погрузчики (рис 37). Они выполняют операции захватывания, вертикального и горизонтального перемещения груза и укладки его в штабель или на транспорт- ные средства. Отечественная промышленность выпускает погрузчики с приводом от двигателя внутреннего сгорания или с электроприводом, питающимся от акку- муляторной батареи. При работе в закрытых помещениях и цехах применяют ак- кумуляторные погрузчики. Отечественные аккумуляторные погрузчики выпуска- ют грузоподъемностью не более 5 т, погрузчики с двигателем внутреннего сгора- ния – грузоподъемностью 3,2 т и более.
Рис. 37. Электропогрузчик на пневмоколесном ходу с вилочным захватом
В зависимости от назначения погрузчики выполняют в виде самоходных тележек, имеющих подвижную платформу с подъемным грузозахватным устрой- ством, или в виде тягачей для буксирования прицепных тележек. В зависимости от характера выполняемой работы и вида груза погрузчики оборудуют различны- ми специальными приспособлениями для захватывания штучных грузов и уклад- ки их в штабеля или на стеллажи.
Универсальность погрузчика и возможность его использования определя- ется числом и конструкцией сменных грузозахватных приспособлений, основным из которых является вилочный захват. Конструкции сменных грузозахватных приспособлений аналогичны представленным на рис. 26 для крана штабелера. Для работы с некоторыми грузами (бочки, рулоны, ящики, и т.п.) на каретке гру- зоподъемного устройства устанавливают захват с челюстями плоской или полу- круглой формы, которые можно поворачивать на угол 90…360º. Это позволяет при укладке груза в штабель установить его в требуемом положении. Для удоб- ства захватывания, транспортирования и укладки грузов рама погрузчика может отклоняться от вертикального положения вперёд на угол 3…6º (рис.38) и назад на угол 10…15º. Наклон рамы вперёд, производимый при помощи гидроцилиндра, облегчает сталкивание груза с вилочного захвата при штабелировании, наклон назад увеличивает устойчивость погрузчика при перевозке груза.Рис. 38 Положение рамы погрузчика:
I – при захвате и штабелировании
грузов; II- при транспортировании
Отечественные погрузчики имеют гидравлический или механический привод грузоподъёмного устройства. Преимуществом гидравлического привода является плавность подъёма и опускания каретки, широкий диапазон регулирова- ния скорости и простота конструктивной схемы. Механический привод требует применения специального редуктора и весьма длинной грузовой цепи.
- 1 2 3 4 5 6 7 8 9 ... 18
Общие положения расчёта грузоподъёмных машин
§1. Основные параметры грузоподъёмных машин
Грузоподъёмные машины характеризуются следующими основными по- казателями: грузоподъёмностью, скоростями движения отдельных механизмов, пролётов, режимами работы, вылетом, высотой подъёма грузозахватного органа. Значение этих показателей должны происходит повторно – кратковременных выключениях. Полное время цикла работы механизма склады- вается из времени пуска tn , времени движении с установившейся скоро-
стьюty , времени торможения tТ и времени пауз t0
t ц =tn +ty +t0 +tТ . Относительная продолжительность включения
П tв
100%
t
в
ц
где t в - время работы механизма в течении цикла.
Приняты номинальные значения ПВ 15, 25, 40, 60%.Интенсивность рабо- ты механизма определяется коэффициентами использования в течении суток кс и коэффициентом использования в течении года. Коэффициент использования кра- на по грузоподъёмности
Г ,
К Qср Q
где Qср - среднее значение массы поднимаемого груза за смену. Для кра- нов с тяжёлыми грузозахватными устройствами
к Qср QМ ,
Г Q Q
М
где Qм - масса грузах ватного устройства. Классы использования механиз- ма, характеризующие интенсивность механизма при эксплуатации, устанавлива- ют в зависимости от общего времени работы Т. Существует шесть классов Ао, А1,…, А6.Классы нагружения механизма, характеризующие относительную нагрузку механизма, в зависимости от значения коэффициента нагружения К при- ведены в табл.1.
Основными параметрами грузоподъёмных машин в соответствии со стан- дартом являются грузоподъёмность, скорость движения механизмов, пролёт, ре- жим работы, вылет, высота подъёма.
Грузоподъёмностью машины Q называют массу номинального рабочего груза на подъём которого рассчитана машина. Соотношение между массой Q и весом G равно G = Qg. При определении грузоподъёмности учитывают массу гру- зозахватных приспособлений и вспомогательных устройств. Значение грузоподъ- ёмности должно соответствовать ГОСТ 1575 – 81 для всех грузоподъёмных кра- нов от 0,01 (Т) до 1250 (Т).