Файл: Г.М. Гринфельд ТЕОРИЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ уч. пособие.doc
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 29.07.2024
Просмотров: 652
Скачиваний: 3
СОДЕРЖАНИЕ
1. ОсновНые понятия и определения теории автоматического управления
1.1. Краткие сведения по истории развития систем автоматического управления
1.2. Обобщенная структурная схема сау
2. Математическое описание линейных сау
2.1. Составление и линеаризация дифференциальных уравнений сау
Основные свойства (теоремы) преобразования Лапласа
Изображения по Лапласу типовых сигналов
2.3. Временные и частотные характеристики звеньев и систем
2.4. Элементарные звенья систем автоматического управления
Пропорциональное (усилительное, безинерционное, масштабирующее) звено
Идеальное дифференцирующее звено
Апериодическое звено первого порядка
Реальное дифференцирующее звено
Инерционное звено второго порядка
Интегро-дифференцирующее звено
Пропорционально-интегральный регулятор (пи-регулятор)
2.5. Неминимально-фазовые звенья
2.6. Эквивалентные преобразования структурных схем линейных сау
2.7. Передаточные функции многоконтурных систем
3. Анализ устойчивости линейныхсау
3.1.Понятие устойчивости линейных систем
3.2.Алгебраический критерий устойчивости Гурвица
3.3.Частотные критерии устойчивости Михайлова и Найквиста
3.5.Оценка устойчивости по логарифмическим амплитудно- и фазо-частотным характеристикам
3.6.Устойчивость систем с запаздыванием
4. Качество динамических характеристик сау
4.1. Показатели качества процесса регулирования
4.2. Частотные критерии качества
4.3. Корневые критерии качества
4.4. Интегральные критерии качества
5.1. Стационарные режимы сау. Передаточные функции статических и астатических систем
5.2. Коэффициенты ошибки системы
5.3. Системы комбинированного управления
6. Анализ сау в пространстве состояния
6.1. Основные положения метода переменных состояния
6.2. Способы построения схем переменных состояния
Метод прямого программирования
Метод параллельного программирования
Метод последовательного программирования
6.3. Решение уравнений состояния линейных стационарных сау. Вычисление фундаментальной матрицы
Последовательные корректирующие звенья
Параллельные корректирующие звенья
7.2. Частотный метод синтеза корректирующих устройств
Построение лах в низкочастотном диапазоне
Построение лах в среднечастотном диапазоне
Зависимость колебательности от значений hи h1
Построение лах в высокочастотном диапазоне
7.3. Последовательные корректирующие устройства
7.4. Параллельные корректирующие устройства
7.5. Техническая реализация корректирующих звеньев
Пассивные четырехполюсники постоянного тока
Пассивные корректирующие четырехполюсники
Активные корректирующие звенья
Активные четырехполюсники постоянного тока
8. Нелинейные системы автоматического управления
8.1. Особенности нелинейных систем и методы их анализа
8.2. Исследование нелинейных систем на фазовой плоскости
8.3. Метод гармонической линеаризации нелинейных звеньев
Коэффициенты гармонической линеаризации типовых нелинейностей
8.5. Методы определения параметров автоколебаний
Задание для расчета линейной caу
Варианты задания для расчета линейной сау
Варианты передаточных функций линейной сау
Задание для расчета нелинейной сау
Варианты задания для расчета нелинейной сау
Варианты структурных схем нелинейных систем Варианты статических характеристик нелинейного элемента
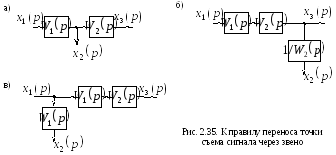
Передаточная функция замкнутой системы:
Ф(р)
=
![]() .
.
Вопросы для самопроверки
Является ли блок умножения двух сигналов линейным звеном? В случае отрицательного ответа приведите линеаризованное описание этого звена в отклонениях.
Сформулируйте основные теоремы преобразования Лапласа.
Дайте определение передаточной функции САУ.
Как передаточная функция линейной системы зависит от входного сигнала?
Как определяются нули и полюса передаточной функции системы? Чему равен порядок передаточной функции системы?
6.С чем связана физическая реализуемость САУ?
Какие системы являются минимально-фазовыми?
Что называется переходной функцией системы? Как переходная функция связана с функцией веса системы?
Как связаны между собой передаточная функция и функция веса системы?
Что описывают частотные характеристики САУ?
Как связаны передаточная функция и амплитудно-фазовая характеристика линейной системы?
Назовите основные виды соединения звеньев в САУ?
Чему равна передаточная функция замкнутой системы в разомкнутом состоянии?
Дайте определение передаточной функции замкнутой системы по ошибке.
3. Анализ устойчивости линейныхсау
3.1.Понятие устойчивости линейных систем
Устойчивость – это свойство САУ возвращаться в состояния покоя или установившегося движения, из которого система была первоначально выведена каким-либо воздействием и последующим прекращением этого воздействия.
Обычно понятие устойчивости иллюстрируется следующими примерами. Будем считать системой некоторый шар, который может находиться в одном из трех состояний:
е
 сли
шар находится на вогнутой поверхности
(рис. 3.1, а), то при наличии силыF,
соответствующей внешнему воздействию
на систему, шар можно вывести из состояния
покоя. Если теперь устранить воздействие
F,
то шар после совершения нескольких
колебаний около точки равновесия А
придет в установившееся состояние (или
состояние покоя), соответствующее точке
А.
Это пример устойчивого равновесия –
система является устойчивой;
сли
шар находится на вогнутой поверхности
(рис. 3.1, а), то при наличии силыF,
соответствующей внешнему воздействию
на систему, шар можно вывести из состояния
покоя. Если теперь устранить воздействие
F,
то шар после совершения нескольких
колебаний около точки равновесия А
придет в установившееся состояние (или
состояние покоя), соответствующее точке
А.
Это пример устойчивого равновесия –
система является устойчивой;если к шару, находящемуся на выпуклой поверхности (рис. 3.1, б), приложена сила F, то, отклонившись под воздействием этой силы в точку B, шар после прекращения воздействия силы не придет в установившееся положение (в точку А). Такое состояние является неустойчивым;
е
 сли
шар находится на шероховатой ровной
поверхности (рис. 3.1, в) и к нему приложена
силаF,
то шар выйдет из состояния равновесия
и после снятия воздействия придет в
новое состояние равновесия. В зависимости
от величины и знака силы F
шар может иметь бесчисленное множество
точек равновесия. Такое состояние носит
название нейтрально-устойчивого,
т.е. система является нейтрально-устойчивой.
сли
шар находится на шероховатой ровной
поверхности (рис. 3.1, в) и к нему приложена
силаF,
то шар выйдет из состояния равновесия
и после снятия воздействия придет в
новое состояние равновесия. В зависимости
от величины и знака силы F
шар может иметь бесчисленное множество
точек равновесия. Такое состояние носит
название нейтрально-устойчивого,
т.е. система является нейтрально-устойчивой.
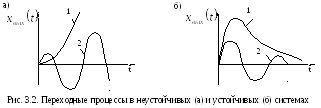
На рис. 3.2 приведены типичные кривые монотонных (1) и колебательных (2) переходных процессов в неустойчивых (рис. 3.2, а) и устойчивых (рис. 3.2, б) системах.
Исследование устойчивости САУ имеет огромное значение, так как САУ в замкнутом виде обычно склонны к неустойчивой работе.
Устойчивость линейной системы определяется ее параметрами и не зависит от внешних воздействий. Процессы в САУ описываются неоднородным дифференциальным уравнением (2.5), общее решение которого состоит из двух составляющих:
xвых(t) = xвых(вын)(t) + xвых(св)(t). (3.1)
Здесь xвых(вын)(t) – частное решение уравнения (2.5), определяемое приложенным к системе внешним воздействием, вследствие чего xвых(вын)(t) называется вынужденной составляющей; xвых(св)(t) – общее решение соответствующего уравнению (2.5) однородного дифференциального уравнения
![]() ,
(3.2)
,
(3.2)
т.е. дифференциального уравнения, правая часть которого равна нулю, следовательно, равны нулю внешнее воздействие xвх(t) и все ее производные.
Поскольку только xвых(св)(t) описывает поведение САУ после устранения внешнего воздействия, эту составляющую в выражении (3.1) называют свободной (переходной) составляющей.
Очевидно, что линейная система устойчива, если свободная составляющая с течением времени затухает, т.е.
![]() Хвых(св)(t)
= 0.
(3.3)
Хвых(св)(t)
= 0.
(3.3)
Общее решение однородного дифференциального уравнения (3.3) определяется корнями соответствующего характеристического уравнения:
anpnxвых(p) + a(n-1)p(n-1)xвых(p) +…+ a1pxвых(p) + a0xвых(p) = 0, (3.4)
т.е. полюсами передаточной функции замкнутой системы.
Общее решение однородного дифференциального уравнения равно:
![]() ,
(3.5)
,
(3.5)
г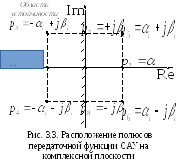 деpi
– корень характеристического уравнения
(полюс системы),
деpi
– корень характеристического уравнения
(полюс системы),
![]() ;Ci
– постоянная интегрирования.
;Ci
– постоянная интегрирования.
Корни характеристического уравнения с постоянными коэффициентами могут быть вещественными (в том числе нулевыми), а также попарно сопряженными комплексными или чисто мнимыми.
Если
полюс pi
вещественный и отрицательный, т.е. pi
< 0 (рис. 3.3, полюс
![]() ),
то соответствующее ему слагаемое в
выражении
(3.5) с ростом
времени стремится к нулю.
),
то соответствующее ему слагаемое в
выражении
(3.5) с ростом
времени стремится к нулю.
Если
же pi
– вещественный положительный полюс,
т.е. pi
> 0,
(рис.
3.3, полюс
![]() ),
то это слагаемое, а значит и вся свободная
составляющая, неограниченно
возрастает.
),
то это слагаемое, а значит и вся свободная
составляющая, неограниченно
возрастает.
Паре комплексно-сопряженных полюсов
pi,i+1 = αi + jβi ,
в свободной составляющей соответствует слагаемое:
![]() ,
,
где
![]() определяются через
определяются через![]() и
и![]()
![]() .
.
Такое
слагаемое в выражении (3.5) стремится к
нулю, если вещественные части
комплексно-сопряженных полюсов
отрицательны (рис. 3.3, полюса
![]() ),
в противном случае (рис. 3.3, полюса
),
в противном случае (рис. 3.3, полюса![]() )
амплитуда колебаний соответствующего
слагаемого в свободной составляющей
непрерывно возрастает.
)
амплитуда колебаний соответствующего
слагаемого в свободной составляющей
непрерывно возрастает.
Паре
мнимых полюсов pi,i+1
= +
jβi
(рис. 3.3,полюса ![]() )
в выражении (3.4) соответствует слагаемое:
)
в выражении (3.4) соответствует слагаемое:
Ai
sin(βit
+
![]() ),
),
определяющее незатухающие колебания с постоянной амплитудой Ai.
Таким
образом, для устойчивости системы САР
необходимо и достаточно, чтобы все
корни характеристического уравнения
на плоскости комплексного переменного![]() были
расположены слева от мнимой оси (рис.
3.3,область
устойчивости).
Только при этом все слагаемые в выражении
(3.5) будут
стремиться к нулю.
были
расположены слева от мнимой оси (рис.
3.3,область
устойчивости).
Только при этом все слагаемые в выражении
(3.5) будут
стремиться к нулю.
Если
корни характеристического уравнения
находятся в левой полуплоскости
![]() за исключение нескольких, расположенных
на мнимой оси, то система находится награнице
устойчивости.
При этом возможны два случая: корень в
начале координат и пара мнимых корней.
Нулевой корень появляется, когда
свободный член характеристического
уравнения равен нулю. Если остальные
корни этого уравнения отрицательные,
то система нейтрально устойчива. В том
случае, когда характеристическое
уравнение имеет пару мнимых корней,
границу устойчивости называют
колебательной.
за исключение нескольких, расположенных
на мнимой оси, то система находится награнице
устойчивости.
При этом возможны два случая: корень в
начале координат и пара мнимых корней.
Нулевой корень появляется, когда
свободный член характеристического
уравнения равен нулю. Если остальные
корни этого уравнения отрицательные,
то система нейтрально устойчива. В том
случае, когда характеристическое
уравнение имеет пару мнимых корней,
границу устойчивости называют
колебательной.
Определение
устойчивости САУ по полюсам ее передаточной
функции называют прямым
методом оценки устойчивости.
Однако для оценки устойчивости линейной
системы не обязательно вычислять
значения ее полюсов, т.е. решать
алгебраическое уравнение (3.4) n-го
порядка. Достаточно знать, все ли полюса
находятся в левой полуплоскости
комплексной плоскости р
(являются «левыми»). Такой подход к
определению устойчивости системы
характерен для косвенных
методов оценки устойчивости
(критериев
устойчивости),
позволяющих судить о расположении
полюсов на плоскости комплексного
переменного
![]() без
их расчета.
без
их расчета.
Различают алгебраические и частотные критерии устойчивости. Отличие критериев друг от друга связано с использованием различных характеристик САУ, но при этом все они предполагают необходимость проверки необходимого и достаточного условия устойчивости.
Независимо от выбранного критерия устойчивости первоначально проверяется выполнение необходимого условия устойчивости, согласно которому все коэффициенты характеристического уравнения (3.4) должны быть строго положительными, т.е.
ai > 0 при i = 1,…,n. (3.6)
Будем полагать, что все полюса действительные. Тогда для доказательства необходимого условия устойчивости достаточно представить уравнение (3.4) в виде:
an(p – p1) (p – p2)………….. (p – pn) = 0 , (3.7)
где
pi
– полюс передаточной функции, (i
=
![]() ).
).
Если система устойчива, т. е. все ее действительные полюса рi отрицательные, то, раскрыв скобки в выражении (3.7), получим уравнение с положительными коэффициентами. Если система неустойчива, т.е. хотя бы один из корней положительный, и, перемножив сомножители в выражении (3.7), получим уравнение с несколькими отрицательными коэффициентами.
Если необходимое условие не выполняется, делается заключение о том, что система неустойчива. В противном случае необходимо переходить к проверке достаточного условия устойчивости, формулировка которого зависит от выбранного критерия устойчивости. В дальнейшем будем полагать, что необходимое условие устойчивости выполняется.
Пример. Необходимо оценить устойчивость замкнутой системы (рис. 3._), передаточной функция прямого канала которой равна
![]()
Т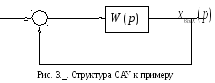 ипичной
ошибкой при решении такой задачи является
попытка оценить устойчивость замкнутой
системы по полюсам передаточной функции
ипичной
ошибкой при решении такой задачи является
попытка оценить устойчивость замкнутой
системы по полюсам передаточной функции![]() .
Предварительно необходимо вычислить
передаточную функцию замкнутой системы:
.
Предварительно необходимо вычислить
передаточную функцию замкнутой системы:
![]() .
.
В
данном случае нет необходимости вычислять
полюса передаточной функции
![]() или прибегать к использованию какого-либо
критерия. Действительно, для полученной
передаточной функции не выполняется
необходимое условие устойчивости - ее
характеристический полином не содержит
слагаемого
или прибегать к использованию какого-либо
критерия. Действительно, для полученной
передаточной функции не выполняется
необходимое условие устойчивости - ее
характеристический полином не содержит
слагаемого![]() ,
т.е. коэффициент
,
т.е. коэффициент![]() .
Следовательно, данная замкнутая система
неустойчива.
.
Следовательно, данная замкнутая система
неустойчива.