Файл: Г.М. Гринфельд ТЕОРИЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ уч. пособие.doc
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 29.07.2024
Просмотров: 650
Скачиваний: 3
СОДЕРЖАНИЕ
1. ОсновНые понятия и определения теории автоматического управления
1.1. Краткие сведения по истории развития систем автоматического управления
1.2. Обобщенная структурная схема сау
2. Математическое описание линейных сау
2.1. Составление и линеаризация дифференциальных уравнений сау
Основные свойства (теоремы) преобразования Лапласа
Изображения по Лапласу типовых сигналов
2.3. Временные и частотные характеристики звеньев и систем
2.4. Элементарные звенья систем автоматического управления
Пропорциональное (усилительное, безинерционное, масштабирующее) звено
Идеальное дифференцирующее звено
Апериодическое звено первого порядка
Реальное дифференцирующее звено
Инерционное звено второго порядка
Интегро-дифференцирующее звено
Пропорционально-интегральный регулятор (пи-регулятор)
2.5. Неминимально-фазовые звенья
2.6. Эквивалентные преобразования структурных схем линейных сау
2.7. Передаточные функции многоконтурных систем
3. Анализ устойчивости линейныхсау
3.1.Понятие устойчивости линейных систем
3.2.Алгебраический критерий устойчивости Гурвица
3.3.Частотные критерии устойчивости Михайлова и Найквиста
3.5.Оценка устойчивости по логарифмическим амплитудно- и фазо-частотным характеристикам
3.6.Устойчивость систем с запаздыванием
4. Качество динамических характеристик сау
4.1. Показатели качества процесса регулирования
4.2. Частотные критерии качества
4.3. Корневые критерии качества
4.4. Интегральные критерии качества
5.1. Стационарные режимы сау. Передаточные функции статических и астатических систем
5.2. Коэффициенты ошибки системы
5.3. Системы комбинированного управления
6. Анализ сау в пространстве состояния
6.1. Основные положения метода переменных состояния
6.2. Способы построения схем переменных состояния
Метод прямого программирования
Метод параллельного программирования
Метод последовательного программирования
6.3. Решение уравнений состояния линейных стационарных сау. Вычисление фундаментальной матрицы
Последовательные корректирующие звенья
Параллельные корректирующие звенья
7.2. Частотный метод синтеза корректирующих устройств
Построение лах в низкочастотном диапазоне
Построение лах в среднечастотном диапазоне
Зависимость колебательности от значений hи h1
Построение лах в высокочастотном диапазоне
7.3. Последовательные корректирующие устройства
7.4. Параллельные корректирующие устройства
7.5. Техническая реализация корректирующих звеньев
Пассивные четырехполюсники постоянного тока
Пассивные корректирующие четырехполюсники
Активные корректирующие звенья
Активные четырехполюсники постоянного тока
8. Нелинейные системы автоматического управления
8.1. Особенности нелинейных систем и методы их анализа
8.2. Исследование нелинейных систем на фазовой плоскости
8.3. Метод гармонической линеаризации нелинейных звеньев
Коэффициенты гармонической линеаризации типовых нелинейностей
8.5. Методы определения параметров автоколебаний
Задание для расчета линейной caу
Варианты задания для расчета линейной сау
Варианты передаточных функций линейной сау
Задание для расчета нелинейной сау
Варианты задания для расчета нелинейной сау
Варианты структурных схем нелинейных систем Варианты статических характеристик нелинейного элемента
Только в этом случае выполняется условие (3.18). На рис. 3.5, а,б, приведены примеры годографов для устойчивых и неустойчивых систем. Если годограф проходит через начало координат (рис.3.5, в), то система находится на границе устойчивости.
Из формулировки критерия следует, что система устойчива, если годограф Михайлова, начавшись на действительной оси при ω = 0, несколько раз последовательно пересекает действительную и мнимую ось. Значения ω, при которых происходят эти пересечения, являются действительными положительными корнями уравнения Y(ω) = 0 (при пересечении с действительной осью) и уравнения Х(ω) = 0 (при пересечении с мнимой осью). Следовательно, оценить устойчивость системы можно и без построения годографа: достаточно, чтобы корни указанных уравнений чередовались друг с другом.
На практике более широкое применение, по сравнению с критерием Михайлова, нашел частотный критерий Найквиста, который позволяет судить об устойчивости замкнутой системы по частотным характеристикам этой системы в разомкнутом состоянии.
Рассмотрим замкнутую систему с единичной обратной связью. Первоначально будем полагать, что соответствующая ей разомкнутая система устойчива. Пусть передаточная функция этой системы в разомкнутом состоянии
W(p)
=
![]()
имеет n-й порядок, т.е. число ее полюсов (порядок полиномаA(р)) равноn. На основании принципа физической реализуемости можно утверждать, что число нулей передаточной функцииW(p) (порядок полиномаВ(р)) не превышает n. Передаточная функция системы в замкнутом состоянии:
Ф(р)
=![]() =
=![]() .
.
Введем в рассмотрение выражение:
D(p)
=1 +W(p)
=
![]() .(3.19)
.(3.19)
Очевидно, что число нулей и полюсов выражения D(p) одинаково и равно n. При этом числитель выражения (3.19) является характеристическим полиномом замкнутой системы, а знаменатель – характеристическим полиномом разомкнутой системы. Осуществим в выражении (3.19) замену p на jω:
D(jω)
=![]() (3.18)
(3.18)
и определим изменение аргумента (3.20), полагая, что замкнутая система устойчива. Поскольку в этом случае в соответствии с принципом аргумента
![]() В(jω)
= n∙π/2
и
В(jω)
= n∙π/2
и
![]() (А(jω) + В(jω))
= n∙π/2,
(А(jω) + В(jω))
= n∙π/2,
то
![]() D(jω)
=
D(jω)
=
![]() (А(jω) + В(jω)) –
(А(jω) + В(jω)) –
![]() В(jω) = 0.
В(jω) = 0.
Таким образом, если разомкнутая и замкнутая системы устойчивы, то изменение аргумента D(jω) равно нулю, следовательно, годограф D(jω) не охватывает начала координат (рис. 3.6, а).
В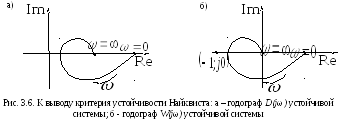 противном случае, когда годограф
охватывает начало координат, изменение
его аргумента не равно нулю и система
в замкнутом состоянии неустойчива.
противном случае, когда годограф
охватывает начало координат, изменение
его аргумента не равно нулю и система
в замкнутом состоянии неустойчива.
Очевидно, что об изменении аргумента вектора удобнее судить не по годографу D(jω) , а по годографу амплитудно-фазовой характеристики разомкнутой системы W(jω). Поскольку D(jω) = 1 + W(jω), изменение аргумента D(jω) будет равно нулю, если годограф амплитудно-фазовой характеристики разомкнутой системы не охватывает точку с координатами (-1, j0) (рис. 3.6, б).
Отсюда следует формулировка критерия Найквиста: система, устойчивая в разомкнутом состояние, будет устойчива и в замкнутом состоянии, если годограф амплитудно-фазовой характеристики разомкнутой системы не охватывает точку с координатами (-1, j0). В том случае, когда годограф частотной характеристики охватывает эту точку, система неустойчива.
Е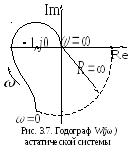 сли
САУ содержит ν интегрирующих звеньев,
то начальное значение фазочастотной
характеристики разомкнутой системы
равно (-ν∙π/2), а амплитудно-частотной –
бесконечности. Поэтому,
сли
САУ содержит ν интегрирующих звеньев,
то начальное значение фазочастотной
характеристики разомкнутой системы
равно (-ν∙π/2), а амплитудно-частотной –
бесконечности. Поэтому,
если ν =1, характеристика W(jω) при ω → 0 уходит в бесконечность вдоль отрицательной мнимой полуоси;
если ν = 2 – вдоль отрицательной действительной полуоси;
если ν = 3 – вдоль положительной мнимой полуоси.
Для удобства оценки устойчивости таких астатических систем годограф W(jω) дополняют дугой бесконечного радиуса, начинающейся на положительной действительной полуоси и проводимой до пересечения с годографом W(jω) (рис. 3.7). Формулировка критерия устойчивости при этом не изменяется.
Если годограф W(jω) разомкнутой системы проходят через точку (1, j0), то система в замкнутом состоянии находится на границе устойчивости.
Рассмотрим случай, когда система в разомкнутом состоянии неустойчива и имеет m правых полюсов. Полагая, что при замыкании обратной связи система становится устойчивой, в соответствии с принципом аргумента получаем:
![]() В(jω)
= (n –2m)∙π/2
и
В(jω)
= (n –2m)∙π/2
и
![]() (А(jω) + В(jω))
= n∙π/2,
(А(jω) + В(jω))
= n∙π/2,
При этом изменение аргумента D(jω) равно:
![]() D(jω)
=
D(jω)
=
![]() (А(jω) + В(jω)) –
(А(jω) + В(jω)) –
![]() В(jω) = n∙π/2
– (n –2m)∙π/2
= m∙π
= 2π∙ m/2.
В(jω) = n∙π/2
– (n –2m)∙π/2
= m∙π
= 2π∙ m/2.
Следовательно, система в замкнутом состоянии будет устойчивой, если годограф частотной характеристики D(jω) m/2 раз охватывает начало координат, а соответственно годограф амплитудно-фазовой характеристики разомкнутой системы W(jω) m/2 раз охватывает точку с координатами (-1,j0), где m – число правых полюсов разомкнутой системы.
Годограф амплитудно-фазовой характеристики W(jω) реальной технической системы может иметь достаточно сложную форму (рис. 3.8).
В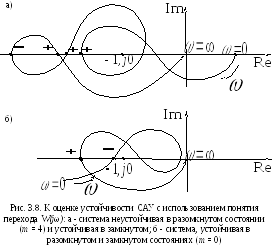 этом случае сложно определить, сколько
раз годографW(jω)
охватывает
начало координат. Задача упрощается,
если ввести в рассмотрение понятие
перехода
годографа
W(jω)
через действительную ось,
т.е. пересечение графиком W(jω)
действительной
оси левее точки с координатами (-1,
j0).
Перехода годографа W(jω)
через действительную ось считается
положительным, если при увеличении
частоты ω
пересечение
оси происходит сверху вниз (годограф
переходит из второго квадранта в третий),
в противном случае переход считается
отрицательным.
этом случае сложно определить, сколько
раз годографW(jω)
охватывает
начало координат. Задача упрощается,
если ввести в рассмотрение понятие
перехода
годографа
W(jω)
через действительную ось,
т.е. пересечение графиком W(jω)
действительной
оси левее точки с координатами (-1,
j0).
Перехода годографа W(jω)
через действительную ось считается
положительным, если при увеличении
частоты ω
пересечение
оси происходит сверху вниз (годограф
переходит из второго квадранта в третий),
в противном случае переход считается
отрицательным.
Обозначим число положительных переходов m+ , а число отрицательных переходов m- . Тогда критерий устойчивости Найквиста может быть сформулирован так: система в замкнутом состоянии становится устойчивой, если разность между числом положительных и отрицательных переходов равна m/2, т.е.
m+ – m- = m/2, (3.21)
где m – число правых полюсов разомкнутой системы.
Если система в разомкнутом состоянии устойчива (m = 0) условие устойчивости системы при ее замыкании упрощается:
m+ – m- = 0. (3.22)
3.4.Запасы устойчивости
В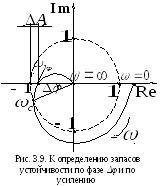 процессе эксплуатации САУ ее параметры
(коэффициенты усиления, постоянные
времени) из-за изменения внешних
условий, колебаний напряжений источников
энергии и других причин отличаются от
расчетных значений. Если не принять
определенных мер, то исходная устойчивая
система может стать неустойчивой. Для
исключения этого явления при проектировании
следует обеспечить определенныезапасы
устойчивости системы,
которые характеризуют близость
годографа амплитудно-фазовой
характеристики
разомкнутой системы
W(jω) к точке
с координатами
(-1, j0).
процессе эксплуатации САУ ее параметры
(коэффициенты усиления, постоянные
времени) из-за изменения внешних
условий, колебаний напряжений источников
энергии и других причин отличаются от
расчетных значений. Если не принять
определенных мер, то исходная устойчивая
система может стать неустойчивой. Для
исключения этого явления при проектировании
следует обеспечить определенныезапасы
устойчивости системы,
которые характеризуют близость
годографа амплитудно-фазовой
характеристики
разомкнутой системы
W(jω) к точке
с координатами
(-1, j0).
Различают запас устойчивости по фазе и усилению. Запасы устойчивости определяются на двух частотах: частоте среза ωс и критической частоте ωкр . На частоте среза амплитудно-частотная характеристика разомкнутой системы |W(jω)| равна единице, а на критической частоте фазо-частотная характеристика этой системы φ(ω) принимает значение, равное -π.
Запас устойчивости по фазе Δφ показывает, насколько фазо-частотная характеристика разомкнутой системы на частоте среза ωс отличается от -π (рис. 3.9):
Δφ
= π –
![]() .
.
Величина запаса устойчивости по усилению может быть определена на частоте ωкр, как разность:
![]() =
1 – |W(jωкр)|,
=
1 – |W(jωкр)|,
либо как отношение
α = 1/ |W(jωкр)|.
В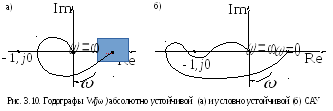 о
втором случае величина
запаса
устойчивости по усилению определяет,
во сколько раз необходимо увеличить
коэффициент усиления, чтобы система
оказалась на границе устойчивости.
о
втором случае величина
запаса
устойчивости по усилению определяет,
во сколько раз необходимо увеличить
коэффициент усиления, чтобы система
оказалась на границе устойчивости.
Системы, годографы W(jω) которых пересекают вещественную ось только справа от точки с координатами (-1, j0) (рис. 3.10, а), называют абсолютно устойчивыми. В таких системах неустойчивость может наступить только при увеличении коэффициента усиления.
Если годограф частотной характеристики W(jω) разомкнутой системы пересекает вещественную ось и слева от точки с координатами (-1, j0), то систему называют условно устойчивой (рис. 3.10, б). Неустойчивой такая система может быть как при увеличении, так и при уменьшении коэффициента усиления.