Файл: Г.М. Гринфельд ТЕОРИЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ уч. пособие.doc
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 29.07.2024
Просмотров: 642
Скачиваний: 3
СОДЕРЖАНИЕ
1. ОсновНые понятия и определения теории автоматического управления
1.1. Краткие сведения по истории развития систем автоматического управления
1.2. Обобщенная структурная схема сау
2. Математическое описание линейных сау
2.1. Составление и линеаризация дифференциальных уравнений сау
Основные свойства (теоремы) преобразования Лапласа
Изображения по Лапласу типовых сигналов
2.3. Временные и частотные характеристики звеньев и систем
2.4. Элементарные звенья систем автоматического управления
Пропорциональное (усилительное, безинерционное, масштабирующее) звено
Идеальное дифференцирующее звено
Апериодическое звено первого порядка
Реальное дифференцирующее звено
Инерционное звено второго порядка
Интегро-дифференцирующее звено
Пропорционально-интегральный регулятор (пи-регулятор)
2.5. Неминимально-фазовые звенья
2.6. Эквивалентные преобразования структурных схем линейных сау
2.7. Передаточные функции многоконтурных систем
3. Анализ устойчивости линейныхсау
3.1.Понятие устойчивости линейных систем
3.2.Алгебраический критерий устойчивости Гурвица
3.3.Частотные критерии устойчивости Михайлова и Найквиста
3.5.Оценка устойчивости по логарифмическим амплитудно- и фазо-частотным характеристикам
3.6.Устойчивость систем с запаздыванием
4. Качество динамических характеристик сау
4.1. Показатели качества процесса регулирования
4.2. Частотные критерии качества
4.3. Корневые критерии качества
4.4. Интегральные критерии качества
5.1. Стационарные режимы сау. Передаточные функции статических и астатических систем
5.2. Коэффициенты ошибки системы
5.3. Системы комбинированного управления
6. Анализ сау в пространстве состояния
6.1. Основные положения метода переменных состояния
6.2. Способы построения схем переменных состояния
Метод прямого программирования
Метод параллельного программирования
Метод последовательного программирования
6.3. Решение уравнений состояния линейных стационарных сау. Вычисление фундаментальной матрицы
Последовательные корректирующие звенья
Параллельные корректирующие звенья
7.2. Частотный метод синтеза корректирующих устройств
Построение лах в низкочастотном диапазоне
Построение лах в среднечастотном диапазоне
Зависимость колебательности от значений hи h1
Построение лах в высокочастотном диапазоне
7.3. Последовательные корректирующие устройства
7.4. Параллельные корректирующие устройства
7.5. Техническая реализация корректирующих звеньев
Пассивные четырехполюсники постоянного тока
Пассивные корректирующие четырехполюсники
Активные корректирующие звенья
Активные четырехполюсники постоянного тока
8. Нелинейные системы автоматического управления
8.1. Особенности нелинейных систем и методы их анализа
8.2. Исследование нелинейных систем на фазовой плоскости
8.3. Метод гармонической линеаризации нелинейных звеньев
Коэффициенты гармонической линеаризации типовых нелинейностей
8.5. Методы определения параметров автоколебаний
Задание для расчета линейной caу
Варианты задания для расчета линейной сау
Варианты передаточных функций линейной сау
Задание для расчета нелинейной сау
Варианты задания для расчета нелинейной сау
Варианты структурных схем нелинейных систем Варианты статических характеристик нелинейного элемента
На
оси частот в порядке возрастания
указываются все частоты сопряжения
![]() ЛАХ, определяемые соответствующими
постоянными времени:
ЛАХ, определяемые соответствующими
постоянными времени:![]() =
1/
=
1/![]() .
.
Построение
ЛАХ начинается на частотах, меньших
самой малой частоты сопряжения
![]() .
.
Если
при этом в выражении (2.59) выполняется
равенство s
=
![]() =
0 (система не имеет нулевых полюсов и
нолей), то первая низкочастотная асимптота
ЛАХ проводится параллельно оси частот
на уровне 20lgk
до частоты
=
0 (система не имеет нулевых полюсов и
нолей), то первая низкочастотная асимптота
ЛАХ проводится параллельно оси частот
на уровне 20lgk
до частоты
![]()
Если
в выражении (2.59) s
![]() , а
, а![]() =
0, то уравнение низкочастотной асимптоты:
=
0, то уравнение низкочастотной асимптоты:
![]() ,
(2.60)
,
(2.60)
т.е.
ЛАХ до наименьшей частоты сопряжения
![]() проводится
с наклоном (+20∙s)
дБ/дек.
проводится
с наклоном (+20∙s)
дБ/дек.
Если
в выражении (2.48) s
=![]() ,
а
,
а![]() ,
то уравнение низкочастотной асимптоты:
,
то уравнение низкочастотной асимптоты:
![]() ,
(2.61)
,
(2.61)
и
наклон ЛАХ до наименьшей частоты
сопряжения
![]() равен -20∙
равен -20∙![]() дБ/дек.
дБ/дек.
Для
построения низкочастотной асимптоты
ЛАХ необходимо для произвольной частоты
![]() меньшей или равной
меньшей или равной![]() по выражениям (2.60) или (2.61) рассчитать
величину
по выражениям (2.60) или (2.61) рассчитать
величину![]() и через точку с координатами (
и через точку с координатами (![]() ;
;![]() )
провести ЛАХ с необходимым наклоном.
)
провести ЛАХ с необходимым наклоном.
На
частоте
![]() производится излом ЛАХ с изменением ее
наклона, величина которого определяется
видом сомножителя в выражении (2.59),
которому соответствует сопрягающая
частота
производится излом ЛАХ с изменением ее
наклона, величина которого определяется
видом сомножителя в выражении (2.59),
которому соответствует сопрягающая
частота![]() .
Наклон ЛАХ на частоте
.
Наклон ЛАХ на частоте![]() изменяется по отношению к предыдущему
наклону на +20∙l,
если
изменяется по отношению к предыдущему
наклону на +20∙l,
если
![]() соответствует постоянной времениT
из сомножителя вида
соответствует постоянной времениT
из сомножителя вида
![]() в
числителе передаточной функции (2.59).
в
числителе передаточной функции (2.59).
Если
сомножитель вида
![]() ,
соответствующий
,
соответствующий![]() присутствует в знаменателе (2.59), то
изменение наклона составляет -20∙
присутствует в знаменателе (2.59), то
изменение наклона составляет -20∙![]() .
.
В
случае, когда
![]() соответствует постоянной времениT
из сомножителя
вида
соответствует постоянной времениT
из сомножителя
вида
![]() ,
происходит изменение предыдущего
наклона на +40∙h,
если указанный сомножитель присутствует
в числителе
,
происходит изменение предыдущего
наклона на +40∙h,
если указанный сомножитель присутствует
в числителе
![]() ,
и на -40∙
,
и на -40∙![]() ,
если он присутствует в знаменателе.
,
если он присутствует в знаменателе.
Таким
же образом характеристика продолжается
в сторону увеличения частоты, претерпевая
соответствующие изломы на каждой
сопрягающей частоте
![]() .
При необходимости вид построенной ЛАХ
уточняется путем введения поправок для
колебательных звеньев.
.
При необходимости вид построенной ЛАХ
уточняется путем введения поправок для
колебательных звеньев.
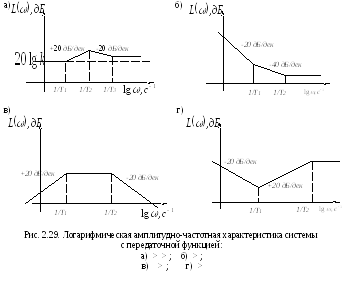
Примеры построения ЛАХ по различным передаточным функциям приведены на рис. 2.29.
В системе, состоящей из n параллельно соединенных звеньев (рис. 2.30), на вход каждому из звеньев подается один и тот же сигнал xвх(p), а их выходные сигналы суммируются:
![]() .
.
Так как
![]() ;
;
![]() ;
;
……………………………
![]() ,
,
то
x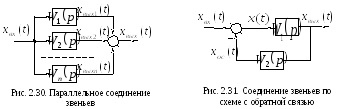 вых(p)
= xвых1(p)
+xвых2(p)+…+xвых(n)(p)
=
вых(p)
= xвых1(p)
+xвых2(p)+…+xвых(n)(p)
=
![]()
![]()
![]() .
.
Таким образом, передаточная функция параллельно соединенных звеньев равна сумме передаточных функций отдельных звеньев:
W(p)
=![]()
![]()
![]() .
(2.62)
.
(2.62)
Очевидно, что в случае, когда выходной сигнал какого-либо из параллельно соединенных звеньев поступает в сумматор со знаком «минус», передаточная функция этого звена входит в (2.62) также со знаком «минус».
Рассмотрим структуру системы с обратной связью (рис. 2.31). На вход звена, охваченного обратной связью, подается сигнал рассогласования, равный:
![]() .
.
Поскольку
![]() ,
то
,
то![]()
Изображение выходного сигнала:
xвых(р)=
![]()
![]()
![]()
откуда
![]() .
.
Следовательно, передаточная функция замкнутой системы (в замкнутом состоянии) описывается следующим выражением:
Ф(p)
=
![]() .
(2.63)
.
(2.63)
Передаточная функция (2.63) найдена для случая отрицательной обратной связи. Если обратная связь положительная, то
Ф(p)
=
![]() .
(2.64)
.
(2.64)
При анализе и синтезе CАУ, наряду с передаточной функцией (2.63) – (2.64), используются передаточная функция разомкнутой системы и передаточная функция по ошибке.
Передаточная функция разомкнутой системы (замкнутой системы в разомкнутом состоянии):
W(p)
=
![]() .
(2.65)
.
(2.65)
Передаточная функция по ошибке:
Фx(p)
=
![]()
![]()
![]() .
(2.66)
.
(2.66)
2.7. Передаточные функции многоконтурных систем
К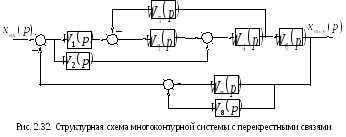 многоконтурным относятся САУ, в которых,
помимо замкнутого контура с главной
обратной связью, имеются контуры,
образованные локальными прямыми и
обратными связями. Часть из них имеет
естественную природу, а остальные
введены для придания системе нужных
динамических характеристик. При этом
часть из этих связей могут быть
перекрестными (рис. 2.32).
многоконтурным относятся САУ, в которых,
помимо замкнутого контура с главной
обратной связью, имеются контуры,
образованные локальными прямыми и
обратными связями. Часть из них имеет
естественную природу, а остальные
введены для придания системе нужных
динамических характеристик. При этом
часть из этих связей могут быть
перекрестными (рис. 2.32).
В этом случае для определения передаточной функции системы, наряду с рассмотренными ранее, используют ряд дополнительных правил. К их числу относятся следующие: правила переноса сумматора через звено и точку разветвления (точку съема сигнала), правила переноса точки разветвления через звено и т.п. Все эти правила достаточно очевидны и вытекают из условия сохранения неизменным сигнала на выходе структуры после выполнения соответствующих преобразований.
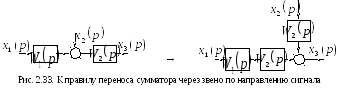
Например,
при переносе сумматора через звено по
направлению сигнала
(рис. 2.33), в
структуру добавляется звено с передаточной
функцией
![]() (р),
при этом изображение выходного сигнала
до и после преобразования одинаково:
(р),
при этом изображение выходного сигнала
до и после преобразования одинаково:
![]() (2.67)
(2.67)
что свидетельствует об эквивалентности исходной и преобразованной структур.
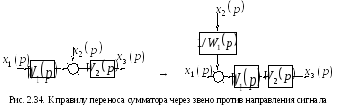
При
переносе сумматора через звено против
направления сигнала (рис. 2 34) в исходную
структуру добавляется звено с передаточной
функцией
![]() .
И в этом случае сигнал на выходе структуры
сохраняется неизменным и равным (2.67).
.
И в этом случае сигнал на выходе структуры
сохраняется неизменным и равным (2.67).
На примере структуры, приведенной на рис. 2.35, а, проиллюстрировано правило переноса точки съема сигнала через звено по направлению сигнала (рис. 2.35, б) и в противоположном направлении (рис. 2.35, в)
Используя рассмотренные выше правила, структурную схему, приведенную на рис. 2.32, можно преобразовать к виду, в котором перекрестные связи отсутствуют (рис. 2.36, а).
Передаточные функции звеньев, входящих в преобразованную структуру системы, приведенную на рис. 2.36, б:
![]() ;
;
![]() ;
;
![]()