Файл: Учебнометодический комплекс для заочного обучения с применением дистанционных технологий для студентов специальности 190702 Организация и безопасность дорожного движения.doc
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 03.12.2023
Просмотров: 880
Скачиваний: 1
СОДЕРЖАНИЕ
1.Основы построения локальной сети
1.1.Классификация локальной сети
1.2.Локальные компьютерные сети. Основные определения, классификация топологий
1.3.Основные компоненты компьютерных сетей. Их преимущества и недостатки
1.4.Физическая среда передачи ЭВС, виды применяемых кабелей, их маркировка
1.5.Сетевая карта. Общие принципы, функционирование установка и настройка
2.Безпроводные компьютерные сети
2.2.Сигналы для передачи информации
2.4.Кодирование и защита от ошибок
2.5. Пропускная способность канала
2.6.Методы доступа к среде в беспроводных сетях
2.7.Виды сигналов связи и способы их обработки
3.Основы безопасности компьютерных сетей
3.1 Система защиты от утечек конфиденциальной информации
3.2.Специфика проектов внутренней информационной безопасности
3.4.Практические мероприятия по защите информации
3.7.Шифрование данных в интернет-компьютерной сети
4.1.Территориально распределенные пользователи систематического видеонаблюдения
4.2.Функции видеонаблюдения. Основные элементы и схемы построения
4.3.Технология распознавания автомобильных номеров
5.Автоматизированная система управления движением
5.1. Назначения и функции АСУД
5.3.Современные АСУД. Расширенные возможности
6.1. Классификация дорожных контроллеров
7.1. Назначения и классификация
7.2. Принципы действия основные элементы
7.3. Сравнение различных систем детектора транспорта
8.Спутниковые и радионавигационные системы GPS и Глонасс
8.1.Назначения и принципы работы
8.2. Источники ошибок и основные сегменты
8.3. Современные навигационные системы на автомобильном транспорте
8.4. Современная спутниковая система навигации
8.5. История создания спутниковых навигационных систем
8.6.Среднеорбитные спутниковые навигационные системы СНС GPS
8.8.Точность определения координат объектов
8.10. Проблемы и перспективы автомобильной спутниковой навигации
9.1. Структура интеллектуального АТС
10.1. Общие сведения и характеристика
12.Цифровая радиосвязь стандарта АРСО-25
12.1.Основные определения и элементы
12.6. Шифрование и аутентификация
12.7.Вызовы и управления сетей
Примеры Раций стандарта АРСО 25 отечественного и иностранного производства
Из многих методов цифровой обработки сигналов в ЦРПУ важнейшими являются цифровая фильтрация и демодуляция. Рассмотрим алгоритмы и структуру цифрового фильтра (ЦФ) и цифрового демодулятора (ЦД).
Цифровой фильтр – это дискретная система (физическое устройство или программа для ЭВМ). В нём последовательность числовых отсчётов {x(kT)}входного сигнала преобразуется в последовательность {y(kT)}выходного сигнала.
Основными алгоритмами ЦФ являются: линейное разностное уравнение, уравнение дискретной свёртки, операторная передаточная функция в z-плоскости и частотная характеристика.
Уравнения, которые описывают последовательности чисел (импульсов) на входе и выходе ЦФ (дискретной системы с задержкой), называются линейными разностными уравнениями.
Линейное разностное уравнение рекурсивного ЦФ имеет вид:
 , (2.3)
, (2.3)где x[(k-m)T] и y[(k-n)T] – значения входных и выходных последовательностей числовых отсчётов в моменты времени (k-m)T и (k-n)Т соответственно; m и n – число задержанных суммируемых предыдущих входных и выходных числовых отсчётов соответственно;
a0, a1, …, am и b1, b2, …, bn – вещественные весовые коэффициенты.
В (3) первое слагаемое является линейным разностным уравнением нерекурсивного ЦФ. Уравнение дискретной свёртки ЦФ получают из линейного разностного нерекурсивного ЦФ путём замены в нём al на h(lT):
где h(lT) – импульсная характеристика ЦФ, представляющая собой отклик на единичный импульс.
Операторная передаточная функция есть отношение преобразованных по Лапласу функций на выходе и входе ЦФ:
Эту функцию получают непосредственно из разностных уравнений, применяя дискретное преобразование Лапласа и теорему смещения.
Под дискретным преобразованием Лапласа, например, последовательности {x(kT)} понимается получение L – изображения вида
где p=+j - комплексный оператор Лапласа.
Теорему смещения (сдвига) применительно к дискретным функциям можно сформулировать: смещение независимой переменной оригинала во времени на mT соответствует умножению L –изображения на
Учитывая свойства линейности дискретного преобразования Лапласа и теорему смещения, выходная последовательность чисел нерекурсивного ЦФ примет вид
Тогда операторная передаточная функция нерекурсивного ЦФ:
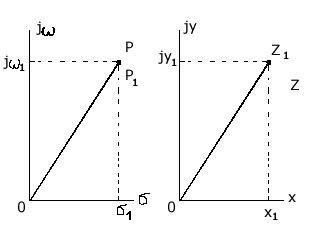
Рисунок 2.13
Аналогично, учитывая формулу (2.3), получим операторную передаточную функцию рекурсивного ЦФ:
 , (2.10)
, (2.10) .
Формулы операторных передаточных функций имеют сложный вид. Поэтому большие трудности возникают при исследовании полей и полюсов (корней рис. 2.13 полинома числителя и корней полинома знаменателя), которые в р-плоскости имеют периодическую по частоте структуру.
Анализ и синтез ЦФ упрощается при применении z – преобразования, когда переходят к новой комплексной переменной z, связанной с p соотношением z=epT или z-1=e-рT. Здесь комплексная плоскость р=+j отображается другой комплексной плоскостью z=x+jy. Для этого необходимо, чтобы e+j=x+jy. На рис. 2.13 показаны комплексные плоскости р и z.
Сделав замену переменных e-pT=z-1 в (2.9) и (2.10), получим передаточные функции в z-плоскости соответственно для нерекурсивного и рекурсивного ЦФ:
 , (2.12)
, (2.12)Передаточная функция нерекурсивного ЦФ имеет только нули, поэтому он абсолютно устойчив. Рекурсивный ЦФ будет устойчивым, если его полюсы будут расположены внутри единичного круга z-плоскости.
Передаточная функция ЦФ в виде полинома по отрицательным степеням переменной z дает возможность непосредственно по виду функции HЦ(z) составить структурную схему ЦФ. Переменную z-1 называют оператором единичной задержки, а на структурных схемах это элемент задержки. Поэтому старшие степени числителя и знаменателя передаточной функции HЦ(z)рек определяют количество элементов задержки соответственно в нерекурсивной и рекурсивной частях ЦФ.
Частотную характеристику ЦФ получают непосредственно из его передаточной функции в z-плоскости путём замены z на ej (или z-1 на e-j) и проведения необходимых преобразований. Поэтому частотную характеристику можно записать в виде:
где КЦ() – амплитудно-частотная (АЧХ), а φ() – фазочастотная характеристики ЦФ; =2
Характеристика КЦ(j) ЦФ является периодической функцией цифровой частоты с периодом 2
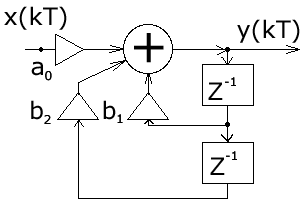
Рисунок 2.14 Структурная схема колебательного контура
В радиотехнике при аналоговой обработке сигнала простейшим частотным фильтром является колебательный контур LC. Покажем, что при цифровой обработке простейшим частотным фильтром является рекурсивное звено второго порядка, передаточная функция в z-плоскости которого
а структурная схема имеет вид, изображенный на рис. 2.14. Здесь оператор Z-1 является дискретным элементом задержки на один такт работы ЦФ, линии со стрелками обозначают умножение на a0, b2, и b1, «блок +» обозначает сумматор.
Для упрощения анализа в выражении (2.14) примем a0=1, представив его по положительным степеням z, получим
.
Передаточная функция цифрового резонатора также как и колебательный LC-контур зависит только от параметров цепи. Роль L,C,R выполняют коэффициенты b1 и b2.
Из (2.15) видно, что передаточная функция рекурсивного звена второго порядка имеет в плоскости z ноль второй кратности (в точки z=0) и два полюса
 и
и 
Уравнение частотной характеристики рекурсивного звена второго порядка получим из (2.14), заменяя z-1 на e-j (при a0=1):
 , (2.16)
, (2.16)Амплитудно-частотная характеристика равна модулю (2.16):
После проведения элементарных преобразований. АЧХ рекурсивного звена второго порядка примет вид:
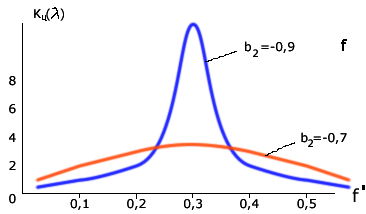
Рисунок 2.15 График рекурсивного звена второго порядка
На рис. 2.15 изображены графики в соответствии с (2.18) при b1=0. Из графиков видно, что рекурсивное звено второго порядка является узкополосной избирательной системой, т.е. цифровым резонатором. Здесь показан только рабочий участок частотного диапазона резонатора f ’<0,5. Далее характери-стики повторяются с интервалом fД
Исследования показывают, что резонансная частота f0’ будет принимать следующие значения:
f0’=fД/4 при b1=0;
f0’
f0’>fД/4 при b1<0.
Значения b1 и b2 изменяют как резонансную частоту, так и добротность резонатора. Если b1 выбирать из условия
Цифровой демодулятор
Цифровой демодулятор в общей теории связи рассматривается как вычислительное устройство, которое выполняет обработку смеси сигнала и помех.
Определим алгоритмы ЦД при обработке аналоговых сигналов АМ и ЧМ с высоким отношением сигнал/шум. Для этого представим комплексную огибающую Z/(t) узкополосной аналоговой смеси сигнала и помех Z’(t) на выходе АЧПТ в показательной и алгебраической форме:
Здесь
 , (2.20)
, (2.20)является огибающей и полной фазой смеси, а ZC(t) и ZS(t) – квадратурные составляющие.
Из (2.20) видно, что огибающая сигнала Z(t) содержит полную информацию о законе модуляции. Поэтому цифровой алгоритм обработки аналогового АМ-сигнала в ЦД с использованием квадратурных составляющих XC(kT) и XS(kT) цифрового сигнала x(kT) имеет вид:
Известно, что частота сигнала является первой производной от его фазы, т.е.
Тогда из (2.20) и (2.22) следует:
 , (2.23)
, (2.23)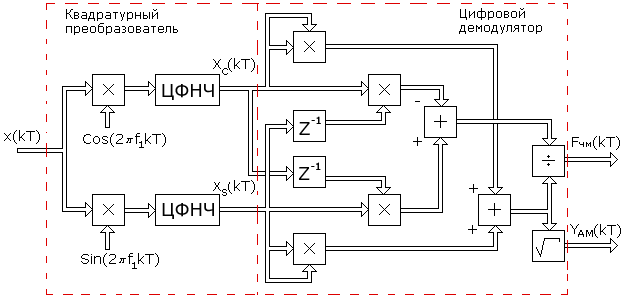
Рисунок 2.16 Структурная схема ЦЧПТ
Используя в (2.23) квадратурные составляющие XC(kT) b XS(kT) цифрового сигнала x(kT) и заменяя производные первыми разностями, получим цифровой алгоритм обработки аналогового ЧМ-сигнала в ЦД:
 , (2.24)
, (2.24)На рис. 2.16 показан вариант структурной схемы ЦЧПТ при приеме аналоговых сигналов АМ и ЧМ, которая состоит из квадратурного преобразователя (КП) и ЦД.
В КП образуются квадратурные составляющие комплексного цифрового сигнала путем перемножения сигнала x(kT) на две последовательности {cos(2πf1kT)} и {sin(2πf1kT)}, где f1 – центральная частота самого низкочастотного отображения спектра сигнала z’(t). На выходе перемножителей цифровые фильтры нижних частот (ЦФНЧ) обеспечивают подавление гармоник с частотой 2f1 и выделяют цифровые отсчеты квадратурных составляющих. Здесь ЦФНЧ используются в качестве цифрового фильтра основной избирательности. Структурная схема ЦД соответствует алгоритмам (2.21) и (2.24).
Рассмотренные алгоритмы цифровой обработки сигналов можно реализовать аппаратным методом (с помощью специализированных вычислителей на цифровых ИС, приборов с зарядной связью или приборов на поверхностно-акустических волнах) и в виде программ на ЭВМ.
При программной реализации алгоритма обработки сигналов ЭВМ выполняет арифметические операции над хранящимися в ней коэффициентами al, bl и переменными x(kT), y(kT).
Ранее недостатками вычислительных методов были: ограниченное быстродействие, наличие специфических погрешностей, необходимость переселекции, большая сложность и стоимость. В настоящее время эти ограничения успешно преодолеваются.
Преимуществами устройств цифровой обработки сигналов перед аналоговыми являются совершенные алгоритмы связанные с обучением и адаптацией сигналов, простота управления характеристиками, высокая временная и температурная стабильность параметров, высокая точность и возможность одновременной и независимой обработки нескольких сигналов.
Простые и сложные сигналы. База сигнала
Характеристики (параметры) систем связи улучшались по мере освоения видов сигналов и их способов приема, обработки (разделения). Каждый раз возникала необходимость в грамотном распределении ограниченного частотного ресурса между работающими радиостанциями. Параллельно этому решался вопрос уменьшения полосы излучения сигналами. Однако были проблемы при приеме сигналов, которые простым распределением частотного ресурса не решались. Только применение статистического способа обработки сигналов – корреляционного анализа позволило решить эти проблемы.
Простые сигналы имеют базу сигнала
BS=TS*∆FS≈1, (2.25)
где TS – длительность сигнала; ∆FS – ширина спектра простого сигнала.
Системы связи, работающие на простых сигналах, называют узкополосными. У сложных (составных, шумоподобных) сигналов за время длительности сигнала TS происходит дополнительная модуляция (манипуляция) по частоте или по фазе. Поэтому здесь применяется следующее соотношение для базы сложного сигнала:
BSS=TS*∆FSS>>1, (2.26)
где ∆FSS – ширина спектра сложного сигнала.
Иногда говорят, что у простых сигналов ∆FS = 1/ TS является спектром сообщения. У сложных сигналов спектр сигналов расширяется в ∆FSS / ∆FS раз. При этом получается избыточность в спектре сигнала, которая определяет полезные свойства сложных сигналов. Если в системе связи со сложными сигналами увеличить скорость передачи информации, чтобы получить длительность сложного сигнала TS = 1/ ∆FSS , то образуется опять простой сигнал и узкополосная система связи. Полезные свойства системы связи исчезают.
Способы расширения спектра сигнала
Рассмотренные выше дискретные и цифровые сигналы – это сигналы временным разделением.
Ознакомимся с широкополосными цифровыми сигналами и с методами многостанционного доступа с кодовым (по форме) разделением каналов.
Вначале широкополосные сигналы применялись в военной и в спутниковой связи.из-за их полезных свойств. Здесь использовались их высокая защищенность от помех и скрытность Система связи с широкополосными сигналами может работать, когда невозможен энергетический перехват сигнала, а подслушивание без наличия образца сигнала и без специальной аппаратуры невозможно и при принятом сигнале.
Использовать отрезки белого теплового шума в качестве переносчика информации и метод широкополосной передачи предложил Шеннон. Он ввел понятие пропускной способности канала связи. Показал связь между возможностью безошибочной передачей информации с заданным отношением
Первой системой связи со сложными сигналами из отрезков белого теплового шума была предложена Костасом. В Советском Союзе применять широкополосные сигналы, когда реализуется метод многостанционного доступа с кодовым разделением каналов, предложил Л. Е. Варакин.
Для временного представления любого варианта сложного сигнала можно записать соотношение:
где UI (t) и
Функциями по сравнению с cosω0t;
При частотном представлении сигнала его обобщенная спектральная форма имеет вид
 ,
, где
Координатные функции должны удовлетворять условию ортогональности
 , (2.29)
, (2.29) а коэффициенты разложения
 (2.30)
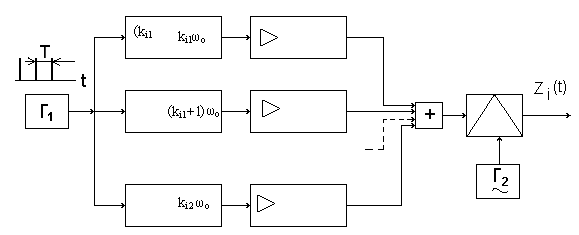
(2.30)Для параллельных сложных сигналов в качестве координатных функций вначале использовали тригонометрические функции кратных частот
 , (2.31)
, (2.31)когда каждый i-й вариант сложного сигнала имеет вид
 t
t Тогда, приняв
Aki =
i = 1,2,3,,…,m ; m – основание кода, получаем
Z i (t) =
 t
t Здесь составляющие сигнала занимают частоты от ki1
Полоса частот, занимаемая сигналом
∆FSS = (ki2 - ki1 + 1)ω0 / 2π = (ki2 - ki1 + 1)/ TS . (2.35)
В ней сосредоточена основная часть энергетического спектра сигнала.
Из соотношения (35) следует, что база этого сигнала
BSS = TS ∙ ∆FSS = (ki2 - ki1 + 1) = Ni , (2.36)
равна числу гармонических составляющих сигнала Ni, которые формирует i-й вариант сигнала

а)
б)
Рисунок 2.17

а)
б)
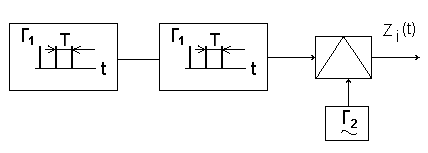
Рисунок 2.18 Схема расширения спектра сигнала с графиком периодической последовательности
С 1996-1997 годов в коммерческих целях компания Qualcomm начала применять для формирования параллельных сложных сигналов на основе (28) подмножества {φk(t)} полных ортогонализированных на интервале [0, TЭ] функций Уолша. При этом реализуется метод многостанционного доступа с кодовым разделением каналов – стандарт CDMA (Code Division Multiple Access)
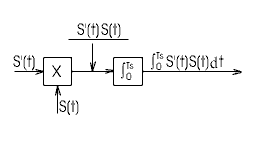
Рисунок 2.19 Схема корреляционного приемника
Полезные свойства широкополосных (составных) сигналов
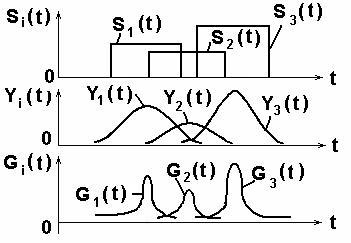
Рисунок 2.20
При связи с подвижными станциями (ПС) проявляется многолучевое (многопутевое) распространение сигнала. Поэтому возможна интерференция сигнала, которая приводит к появлению в пространственном распределению электромагнитного поля глубоких провалов (замираний сигналов). Так в городских условиях в точке приема может быть только переотраженные сигналы от высотных зданий, холмов и т.д., если отсутствует прямая видимость. Поэтому два сигнала с частотой 937,5 МГц ( = 32см), пришедшие со сдвигом во времени на 0,5 нс при разнице в пути 16см, складываются в противофазе.
Уровень сигнала на входе приемника изменяется и от проходящего мимо станции транспорта.
Узкополосные системы связи не могут работать в условиях многолучевости. Так если на входе такой системы будет три луча сигнала одной посылки Si(t) –Si1(t), Si2(t), Si3(t), которые перекрываются во времени за счет разницы в длине пути прохождения, то их разделить на выходе полосового фильтра (Yi1(t), Yi2(t), Yi3(t)) невозможно.
Системы связи со сложными сигналами противостоят многолучевому характеру распространения радиоволн. Так, выбирая полосу ∆FSS такой, чтобы длительность свернутого импульса на выходе корреляционного детектора или согласованного фильтра была меньше времени запаздывания соседних лучей, можно принять один луч или, обеспечив соответствующие задержки импульсов (Gi(t)), сложить их энергию, что увеличит соотношение сигал/шум. Американская система связи Rake подобно граблям собирала принимаемые лучи, отраженного от Луны сигнала и суммировали их.
Принцип накопления сигнала позволяет значительно улучшить помехоустойчивость и другие свойства сигнала. Представление о накоплении сигнала дает простое повторение сигнала.
Первым элементом для этой цели использовалась частотно-избирательная система (фильтр).
Корреляционный анализ позволяет определить статистическую связь (зависимость) между принятым сигналом и эталонным сигналом, находящимся на приемной стороне. Понятие о корреляционной функции ввел Тейлор в 1920г. Корреляционная функция – это статистическое среднее значение второго порядка по времени, или спектральное среднее значение, или вероятностное среднее значение.
Если временные функции (непрерывные последовательности) x(t) и y(t) имеют средние арифметические значения
то взаимная корреляционная функция выражается интегралом (средним значением)
и зависит от параметра задержки τ – времени накопления значения функции. При x(t) = y(t) образуется функция автокорреляции, а при x(t)
Разделение сигналов при представленииих рядами и интегралами Фурье
На базе основных соотношений и определений покажем множественный доступ (разделение сигналов):
- с частотным разделением каналов;
- с временным разделением каналов;
- с кодовым разделением каналов.
Периодическая функция имеет вид:
f(t) = f(t+kT), (2.40)
где T-период, k-любое целое число (k=
На рис.2.10,а,б,в изображен периодический гармонический сигнал u1(t) и его спектр амплитуд и фаз.
На рис.2.11,а,б,в изображены графики периодического сигнала u2(t) - последовательности прямоугольных импульсов и его спектр амплитуд и фаз.
Итак, любые сигналы можно на определенном промежутке времени представить в виде ряда Фурье. Тогда разделение сигналов будем представлять через параметры сигналов, т. е. через амплитуды, частоты, и фазовые сдвиги:
а) сигналы, ряды которых с произвольными амплитудами, не перекрывающими частотами и произвольными фазами разделяются по частоте;
б) сигналы, ряды которых с произвольными амплитудами, перекрываются по частоте, но сдвинутыми по фазе между соответствующими составляющими рядов разделяются по фазе (фазовый сдвиг здесь пропорционален частоте);
Высокая емкость систем связи с составными сигналами будет показана ниже.
в) сигналы, ряды которых с произвольными амплитудами, с составляющими перекрывающимися по частоте (частоты могут совпадать) и произвольными фазами разделяются по форме.
Разделение по форме – это кодовое разделение, когда на передающей и приемной сторонах имеются специально созданные из простых сигналов сложные сигналы (образцы).
При приеме сложный сигнал вначале подвержен корреляционной обработке, а затем
идет обработка простого сигнала.
Разделение частотного ресурса при множественном доступе
В настоящее время сигналы могут передаваться в любых средах (в окружающем пространстве, в проводе, в волоконно-оптическом кабеле и др.). Для повышения эффективности частотного спектра, а за одно и линии передачи образуют групповые каналы для передачи сигналов по одной линии связи. На приемной стороне происходит обратный процесс – разделение каналов. Рассмотрим используемые способы разделения каналов:
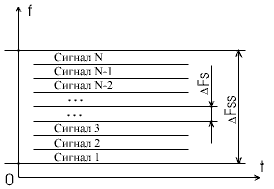
Рисунок 2.21 Частотное разделение каналов (Frequency Division Multiple Access FDMA)
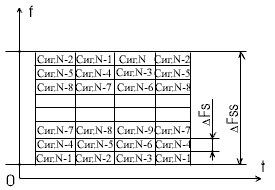
Рисунок 2.22 Временное разделение каналов (Time Division Multiple Access TDMA).

а)
б)
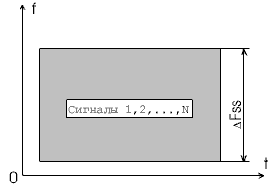
Рисунок 2.23 Кодовое разделение каналов (Code Division Multiple Access CDMA)
2.8.Шифрование в wi-fi сетях
Шифрованию данных в беспроводных сетях уделяется так много внимания из-за самого характера подобных сетей. Данные передаются беспроводным способом, используя радиоволны, причем в общем случае используются всенаправленные антенны. Таким образом, данные слышат все – не только тот, кому они предназначены, но и сосед, живущий за стенкой или «интересующийся», остановившийся с ноутбуком под окном. Конечно, расстояния, на которых работают беспроводные сети (без усилителей или направленных антенн), невелики – около 100 метров в идеальных условиях. Стены, деревья и другие препятствия сильно гасят сигнал, но это все равно не решает проблему.
Изначально для защиты использовался лишь SSID (имя сети). Но, вообще говоря, именно защитой такой способ можно называть с большой натяжкой – SSID передается в открытом виде и никто не мешает злоумышленнику его подслушать, а потом подставить в своих настройках нужный. Не говоря о том, что (это касается точек доступа) может быть включен широковещательный режим для SSID, т.е. он будет принудительно рассылаться в эфир для всех слушающих.
Поэтому возникла потребность именно в шифровании данных. Первым таким стандартом стал WEP – Wired Equivalent Privacy. Шифрование осуществляется с помощью 40 или 104-битного ключа (поточное шифрование с использованием алгоритма RC4 на статическом ключе). А сам ключ представляет собой набор ASCII-символов длиной 5 (для 40-битного) или 13 (для 104-битного ключа) символов. Набор этих символов переводится в последовательность шестнадцатеричных цифр, которые и являются ключом. Драйвера многих производителей позволяют вводить вместо набора ASCII-символов напрямую шестнадцатеричные значения (той же длины). Обращаю внимание, что алгоритмы перевода из ASCII-последовательности символов в шестнадцатеричные значения ключа могут различаться у разных производителей. Поэтому, если в сети используется разнородное беспроводное оборудование и никак не удается настройка WEP шифрования с использованием ключа-ASCII-фразы, - попробуйте ввести вместо нее ключ в шестнадцатеричном представлении.
А как же заявления производителей о поддержке 64 и 128-битного шифрования, спросите вы? Все правильно, тут свою роль играет маркетинг – 64 больше 40, а 128 – 104. Реально шифрование данных происходит с использованием ключа длиной 40 или 104. Но кроме ASCII-фразы (статической составляющей ключа) есть еще такое понятие, как Initialization Vector – IV – вектор инициализации. Он служит для рандомизации оставшейся части ключа. Вектор выбирается случайным образом и динамически меняется во время работы. В принципе, это разумное решение, так как позволяет ввести случайную составляющую в ключ. Длина вектора равна 24 битам, поэтому общая длина ключа в результате получается равной 64 (40+24) или 128 (104+24) бит.