ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 22.11.2023
Просмотров: 382
Скачиваний: 2
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
§3. Процессы неустановившегося движения
Уравнение моментов при пуске имеет вид
М пуск
Мс М ин1 М ин2 ,
где Мин1 – моменты инерции вращающихся масс механизма;
Мин2 – моменты инерции поступательно движущихся масс груза и крана. Подставив в уравнение пускового момента моменты сил инерции получим
In
Q Qгр D2 n
М М
1,1...1,2 1 1
х.к 1
(1)
пуск с
9,55 tn
38,2 tn
i2 м
м
где n1 – частота вращения вала двигателя; tn – время пуска.
Для обеспечения надежного сцепления коэффициент запаса сцепления
принимают
Ксц 1,1 - с ветровой нагрузкой.
Максимальное ускорение, при котором обеспечивается заданный коэффи- циент сцепления
m d
К р WВ
j f 2
fd
g
n Ксц Dх.к.
Dх.к. G
 где φ – коэффициент сцепления колес с рельсом. Отсюда tn j.
где φ – коэффициент сцепления колес с рельсом. Отсюда tn j. Для обеспечения отсутствия буксования ведущих ходовых колес по рель- сам в процессе пуска следует провести проверку выбранного двигателя по уско- рению. Из уравнения (1) при работе без груза определяют фактическое время пус-
Для обеспечения отсутствия буксования ведущих ходовых колес по рель- сам в процессе пуска следует провести проверку выбранного двигателя по уско- рению. Из уравнения (1) при работе без груза определяют фактическое время пус-ка tn
и фактическое ускорение
j .
Фактический коэффициент запаса сцепления при пуске будет равен
К К .
сц W К n d сц
gt
В
n G
-
2
fd р f Dх.к. m
Dх.к.
Процесс торможения механизма передвижения не отличается принципи- ально от процесса пуска. Уравнение моментов при торможении крана имеет вид
W D I n
GD2 n
WВ Wпуск Dх.к.м
MT Tх.к.
1,1...1,2 11 х.к.1м .
2iмм
9,55tn
38,2tn 2
i
м
2iм
Фактический коэффициент запаса сцепления при торможении будет равен
Ксц
Ксц ..
WВ
2
fd
К р n f d
gt G D m D
Т х.к.
х.к.
§4. Расчет ходовых колес
При проектировании грузоподъемной машины диаметр и ширину поверх- ности катания ходовых колес выбирают по стандартам в зависимости от грузо- подъемности и числа колес, а затем проводят проверочный расчет по контактным напряжениям. В зависимости от типа обода и типа рельса различают линейный и точечный контакты.
 При точечном контакте
При точечном контакте к к f
10 2
э ,
где к – коэффициент, зависящий от радиусов колеса; кf – коэффициент тангенциальной нагрузки;
F – приведенная расчетная нагрузка.
F кT кн Fс ,
здесь кт – коэффициент толчков;
кн – коэффициент неравномерности распределения нагрузки; Fс – нагрузка на ходовое колесо.
 При контакте цилиндрического колеса с плоским рельсом
При контакте цилиндрического колеса с плоским рельсом 1,67 104 к f
э ,
где b – рабочая ширина головки рельса.
Приведенный модуль упругости можно определить по формуле
Е 2Е1Е2 ,
Е1 Е2
где Е1, Е2 – модули упругости материала колес и рельса.
Базовые допускаемые значения эффективных напряжений можно принять
э 2,5...3НВ.
Механизмы поворота
Механизмы поворота предназначены для вращения поворотной части кра- на и груза, поворотные краны можно разделить на две группы: краны, грузоподъ- емность которых не зависит от вылета стрелы, и стреловые краны грузоподъем- ность которых, для обеспечения устойчивости, изменяется и изменением вылета
стрелы. Краны с постоянной грузоподъемностью имеют колонну, которая может быть выполнена неподвижной или поворотной.
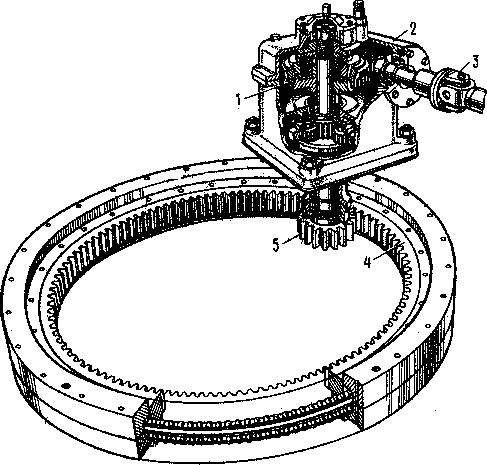 Механизм поворота (рис. 70) имеет двигатель, соединенный муфтой 3 с червячно-планетарным редуктором 2, (i=200÷1000) имеющим горизонтальное расположение червячного класса 1. На выходном конце вала редуктора располо- жена шестерня 5, находящееся в зацеплении с зубчатым колесом 4, соединенным с поворотной частью крана или неподвижной частью портальных кранов должны быть оборудованы муфтой предельного момента. В редукторе применяют кони- ческую предохранительную муфту, встроенное в червячное колесо.
Механизм поворота (рис. 70) имеет двигатель, соединенный муфтой 3 с червячно-планетарным редуктором 2, (i=200÷1000) имеющим горизонтальное расположение червячного класса 1. На выходном конце вала редуктора располо- жена шестерня 5, находящееся в зацеплении с зубчатым колесом 4, соединенным с поворотной частью крана или неподвижной частью портальных кранов должны быть оборудованы муфтой предельного момента. В редукторе применяют кони- ческую предохранительную муфту, встроенное в червячное колесо.Рис. 70. Механизм поворота
Поворотная часть кранов и крановых тележек может опираться на непо- движную или вращающуюся колонку или поворотный круг. В соответствии с этим различают опорно-поворотные устройства на колонне и поворотном круге. При неподвижной колонне поворотная часть крана опирается на пяту, располо- женную в верхней части колонны, а опрокидывающий момент от веса груза урав- новешивается горизонтальными реакциями, воспринимаемыми верхней и нижней опорами кранов. При вращающейся колонне, цапфы колонны вращаются в непо- движно установленных опорах, причем нижняя опора установленная на фунда- менте воспринимает вертикальные и горизонтальные усилия, а верхняя опора – только горизонтальные усилия.