ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 22.11.2023
Просмотров: 395
Скачиваний: 2
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
Ограничитель обычно состоит из датчика усилия и исполнительного (от- ключающего) органа. По устройству датчиков, воспринимающих действующие на кран усилия, различают пружинные, гидравлические и электрические ограничи- тели. Наиболее точно срабатывают торсионные и электрические датчики, которые могут быть связаны с различными элементами крана.
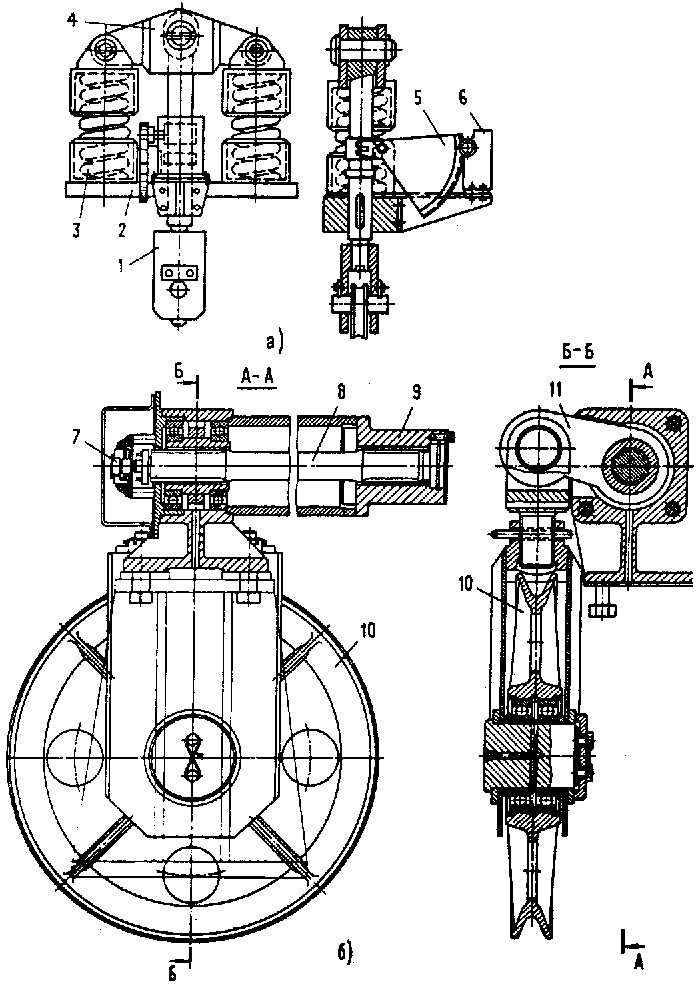
Рис. 75. Ограничитель грузоподъемности: а – пружинный; б – торсионный
Пружинный ограничитель грузоподъемности (рис.75, а), применяемый в башенных и портальных кранах, имеет траверсу 4, опирающуюся на две пружины сжатия 3, установленные на неподвижном основании 2. Конец грузового каната прикреплен к вилке 1 штока ограничителя, соединенного с траверсой. При пере- грузке крана более чем на 10% пружины 3, деформируясь, поворачивают зубча- тый сектор 5, который соединен с шестерней, установленной на вилке конечного выключателя 6. Это приводит к размыканию цепи управления электродвигателем подъема.
В торсионном ограничителе грузоподъемности (рис. 75, б) вместо витых пружин используют торсионный валик 8, один конец которого закреплен непо- движно на опоре 9, а второй имеет рычаг 11 с прикрепленным к нему уравнитель- ным блоком 10 грузового полипласта. При подъеме груза усилие на блоке, про- порциональное весу поднимаемого груза, создает момент, закручивающий торси- онный валик. Угол закручивания валика пропорционален усилию, действующему на блоке 10. Торсионный валик соединен с электрическим потенциометром 7, со- противление которого пропорционально весу поднимаемого груза. При весе гру- за, превышающем допускаемый, происходит автоматическое выключение тока цепи управления. На экранах с гидроприводом функцию ограничителя грузоподъ- емности может выполнять предохранительный клапан. В кранах с телескопиче- ской стрелой ограничитель грузоподъемности должен иметь датчики усилия, наклона и длины стрелы. Сигналы от всех трех датчиков суммируются и опреде- лят возможность работы крана.
Ограничитель грузового момента предназначены для стреловых кранов, грузоподъемность которых зависит от вылета стрелы. Ограничители грузового момента учитывает не только массу поднимаемого груза но и вылет. Перспектив- ным является ограничитель грузового момента электрического типа, состоящий
из трех элементов: датчика усилия, датчика угла наклона стрелы и релейного бло- ка. Датчик усилия 3 (рис. 76) устанавливают между распорками 2 и растяжками 4, соединяющими стрелу с подвижной обоймой 1 полиспаста. Он представляет со- бой кольцевой динамометр с потенциометрическим преобразователем, выдающим электрический сигнал, пропорциональный измеряемому усилию. Силоизмери- тельным элементом датчика является упругое кольцо, растягивающееся под дей- ствием усилий в растяжках, пропорциональных весу поднимаемого груза. Дефор- мация кольца через спиральную пружину передается на передаточный механизм, преобразующий линейное перемещение тяг динамометрического кольца в угло- вое. Датчик угла наклона 7 установлен на кронштейне 8 соосно с осью поворота стрелы и связан поводком 6 с пальцем 5, закрепленным на стреле. При изменении наклона стрелы поворачивается вал датчика, связанный с рычагом потенциомет- рического преобразователя. В данном ограничителе грузового момента использу- ется принцип сравнения электрических сигналов от датчиков усилия и угла наклона стрелы. Прибор срабатывает при разности электрических сигналов, рав- ной нулю, что соответствует наличию максимально допустимой нагрузки.
Ловители автоматически останавливают кабину лифта (или противовес) в случае ослабления канатов или превышения предельной скорости опускания. Принцип действия ловителей основан на создании силы трения между направля-
ющими кабины, установленными в шахте, и элементами ловителя, закрепленны- ми на кабине. Ловители могут быть самозаклинивающимися (клиновые, ролико- вые, эксцентриковые), обеспечивающие мгновенную остановку кабины (приме- няют для грузовых лифтов при скорости менее 1 м/с), и скользящего действия, обеспечивающие плавную остановку кабины (применяют для лифтов всех типов при скорости движения более 1 м/с).
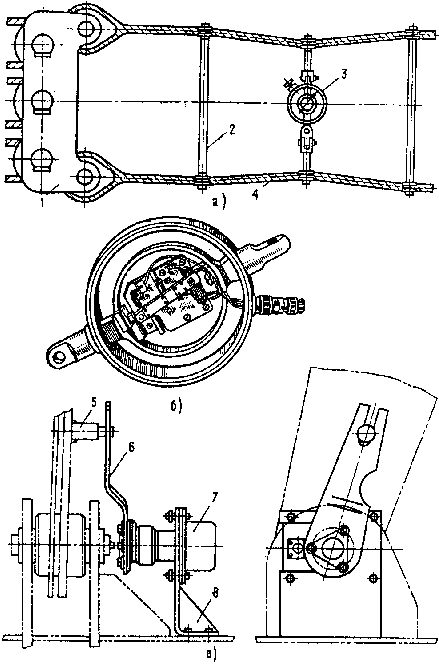
Рис. 76. Ограничитель грузового момента:
а – расположение ограничителя на автомобильном кране; б – датчик усилия, в – расположение датчика угла наклона стрелы
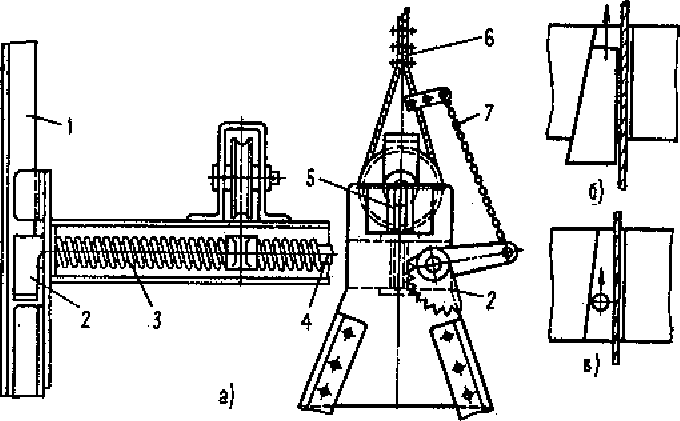
Рис. 77. Схемы действия самозаклинивающихся
ловителей: а – эксцентрикового; б – клинового; в - роликового
Эксцентриковый ловитель (рис. 77) имеет эксцентрики 2, расположенные по обеим сторонам кабины на общей оси 4 и удерживаемые от поворота и сопри- косновения с направляющей 1 гибкой тягой 7, соединенной с подъемным канатом 6, При ослаблении каната эксцентрики 2 под действием усилия пружины 3 пово- рачиваются и при контакте с направляющей 1 зажимают ее между эксцентриком и противоположной стороной направляющего башмака 5, останавливая кабину. Описанному принципу аналогичны действия роликовых и клиновых ловителей, также воздействующих на направляющую при ослаблении или обрыве подъемно- го каната. В этих ловителях угол клина относительно ригеля каркаса кабины вы- бирают таким, чтобы клин или ролик заклинивался при соприкосновении с упор- ной колодкой ригеля и направляющей.
Имеется много конструкций ловителей скользящего действия. В пассажир- ских лифтах с высокими скоростями движения часто применяют клещевые лови- тели (рис. 78), которые устанавливают на металлической раме кабины на оси 5 снизу кабины. На коротких плечах клещей с одной стороны направляющей 7 рас- положена самоустанавливающаяся тормозная колодка 3, а с другой стороны ко- лодка б, отличающаяся от тормозной тем, что между колодкой и направляющей 7 имеется зазор, в котором расположен клин 2. Для уменьшения трения при пере- движении клина по колодке 6 применена роликовая обойма 1. Между длинными плечами клещей расположена предварительно сжатая пружина 4. При перемеще- нии клина 2 вверх относительно клиновой колодки 6 происходит заклинивание направляющей 7, при этом под действием клина короткие плечи захвата расхо- дятся, а длинные плечи сближаются, сжимая пружину 4. Увеличение усилия за- жатия направляющей 7 происходит до того момента, когда колодка 3 вместе с ка- биной переместится относительно клина 2, удерживаемого силами трения на направляющей 7, до упора на клине 2. Наибольшее усилие сжатия направляющей определяется установленным усилием сжатой пружины 4. Если к моменту дости- жения колодкой упора на клине кабина еще не остановится, то с этим наиболь- шим усилием клещевой ловитель перемещается по направляющей до полной остановки кабины.
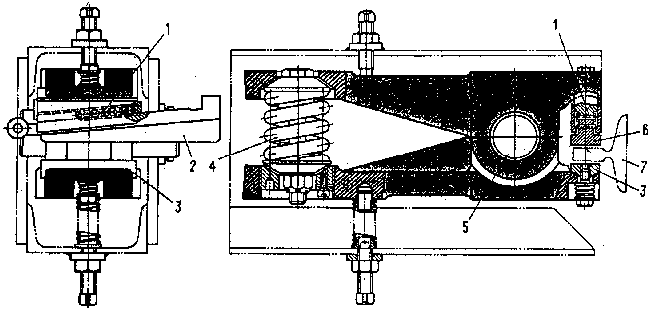
Рис. 78. Клещевой ловитель
Максимальное замедление, создаваемое ловителями, не должно превы- шать
25 м/с2. Допускается превышение этого значения, если период действия по-
вышенного замедления длится не более 0,04 с. Путь торможения кабины, т.е. рас- стояние, проходимое кабиной от начала сжатия колодками направляющей до полной остановки кабины, задается нормами Госгортехнадзора в зависимости от номинальной скорости движения. Ловитель вступает в действие после срабатыва- ния ограничителя скорости.
Ограничитель скорости (рис. 79) имеет бесконечный канат 4, огибающий блок 5 ограничителя скорости и натяжной блок 1, и соединенный зажимом 7 с рычагом, 9, ось вращения которого закреплена на кабине 12. При движении каби- ны с номинальной скоростью зажим 7 увлекает за собой канат 4, заставляя вра- щаться с определенной скоростью механизм ограничителя скорости. При превы- шении скорости кабины (или противовеса, если ловитель установлен для останов- ки противовеса) сверх номинальной срабатывает зажимное устройство 6, зажи- мающее канат 4 и останавливающее его движение, а так как кабина продолжает опускаться, зажим 7, останавливаясь, поворачивает рычаг 9 по часовой стрелке. При этом через систему рычагов и тяг клинья ловителей 3 и 10 поднимаются вверх, заклинивая направляющие 2 и 11 и останавливая кабину. В исходном по- ложении рычаг 9 удерживается от поворота пружиной 8. Стопорение каната 4 за- жимающим устройством 6 происходит, если скорость опускания кабины превы- сит номинальную скорость передвижения не менее чем на 15% и не более чем на 40% для лифтов с номинальной скоростью до 1,4 м/с включительно, не более чем на 33% для лифтов с номинальной скоростью свыше 1,4 и до 4 м/с включительно, не более чем на 25% для лифтов с номинальной скоростью более 4 м/с. У лифтов с номинальной скоростью до 0,5 м/с допускается приведение в действие ловите- лей при скорости не более 0,7 м/с.
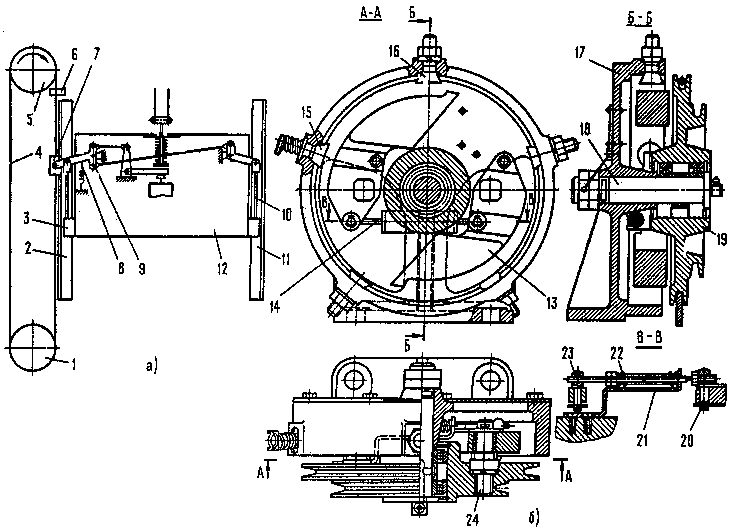
Рис. 79. Установка ограничителя скорости: а – схема совместной работы ограничителя скорости и ловителей; б – ограничитель скорости
Действие ограничителя скорости (рис. 79, б), входящего в схему системы ловителей,
основано на использовании центробежных сил специальных грузов 13.
Ограничитель скорости имеет корпус 17, жестко закрепляемый и устанавливае- мый в машинном отделении (см. поз. 3, рис. 9). На неподвижной оси 18 на под- шипниках качения установлен шкив 19, имеющий два ручья разного диаметра для каната (ручей меньшего диаметра предназначен для инспекторской проверки дей- ствия ограничителя и ловителей). Со шкивом 19 соединены оси 24, на которых расположены центробежные грузы 13, соединенные между собой тягой 14, позво- ляющей регулировать расстояние между пальцами 20 и 23. На поверхности шкива 19 со стороны грузов закреплен держатель 21, между концом которого и гайками тяги 14 расположена предварительно сжатая пружина 22. Тяга 14 соединяет грузы 13 так, что усилие пружины 22 притягивает грузы к оси вращения шкива.
В корпусе 17 закреплены упоры 16, образующие выступы на внутренней цилиндрической поверхности корпуса. При перемещении каната 4 ограничителя вместе с кабиной 12 шкив 19 под действием сил трения между канатом и шкивом вращается со скоростью, соответствующей скорости каната, а следовательно, и скорости кабины. Вместе со шкивом вращаются и грузы 13. Возникающая цен- тробежная сила стремится повернуть грузы на осях 24 в сторону корпуса 17, но этому движению грузов препятствует пружина 22. Если скорость кабины превы- сит допускаемую, то усилия пружины 22 оказывается недостаточно, и грузы по- ворачиваются. При этом они зацепляются за упоры, и шкив останавливается, натягивая канат ограничителя, что приводит к срабатыванию рычажной системы ловителя и захвату направляющих кабины клещами ловителя. Для проверки надежности сцепления каната со шкивом при движении кабины один из упоров 15 выполнен подвижным. При испытаниях он входит внутрь корпуса до соприкосно- вения с центробежными грузами при номинальной скорости движения кабины.
Для ограничения хода кабин лифтов в приямках шахт размещают жесткие упоры или упругие буфера (пружинные или гидравлические), рассчитанные на остановку кабины с нагрузкой, на 10% превышающей номинальную грузоподъ- емность, движущейся со скоростью, допускаемой предохранительными устройствами. Согласно нормам Госгортехнадзора максимальное замедление при посадке